KE-1070使用说明书.pdf - 第796页
第2部 功能详细篇 第1 2章 选项元件 12-22 3) 吸取数据 吸取数据与使用普通吸嘴时相同。因此无需示 教夹持臂的位置或到元件上底面顶靠部分的高 度等。 ① XY坐标: 以元件中心为基准。移动到[夹持位置]、[水平间隙]、[固定臂的偏移量]校正后的坐标。为 了在生产中吸取时包含臂长度补偿量,示教时要使夹持吸嘴的臂尖端在元件侧面以外的位置。 按HOD的ENTER键确定示教坐标后,逆向校正坐标将反映在吸取数据中。用摄像示教开始,在示…
第2部 功能详细篇 第12章 选项元件
12-21
② 输入夹持吸取位置控制信息
控制信息的输入,请参见“第四章 制作生产程序”中的“4-3-5-2-4 附加信息”。
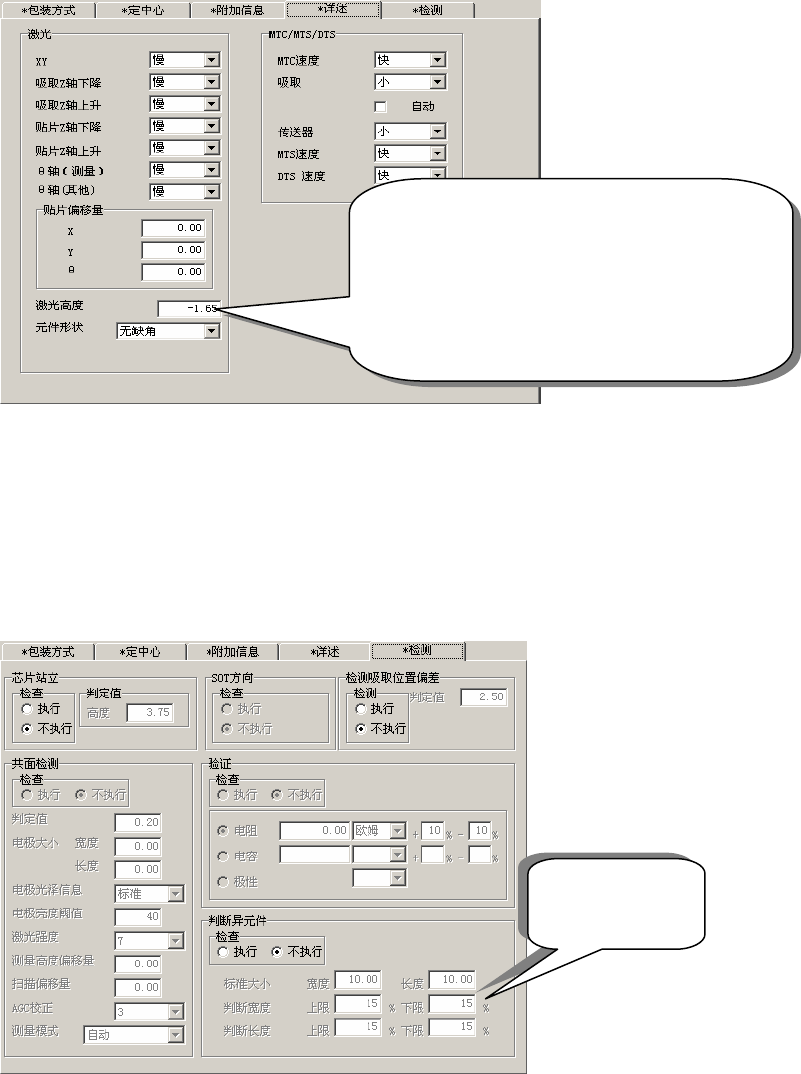
③ 激光高度
使用夹持吸嘴时必须注意。
通常,吸嘴的“激光高度”中应输入从元件上底面到激光投射面的距离,而夹持吸嘴则应
以固定侧臂的吸嘴前端为基准,输入激光投射的距离。
图 12-8-5 激光高度的设定
④ 检查异类元件时的注意事项
指定检查异类元件时,请注意基准尺寸。
◆基准尺寸为激光投射面的模部尺寸,与包括引脚在内的外形尺寸不同。
图12-8-6 指定检查异类元件的设定
指定从吸嘴前端到激光面距离。
大致设定尺寸: -(元件高度-3.5mm)/2,
根据引脚的位置进行微调。
画 面 例: -(6.8-3.5)/2
=-1.65
激光投射模部
的纵向尺寸。
第2部 功能详细篇 第12章 选项元件
12-22
3) 吸取数据
吸取数据与使用普通吸嘴时相同。因此无需示教夹持臂的位置或到元件上底面顶靠部分的高
度等。
① XY坐标:
以元件中心为基准。移动到[夹持位置]、[水平间隙]、[固定臂的偏移量]校正后的坐标。为
了在生产中吸取时包含臂长度补偿量,示教时要使夹持吸嘴的臂尖端在元件侧面以外的位置。
按HOD的ENTER键确定示教坐标后,逆向校正坐标将反映在吸取数据中。用摄像示教开始,在示
教中切换到头部时,不包含校正值。
② Z坐标:
以吸嘴尖端(固定臂尖端=通常的吸嘴尖端同一高度)为基准。为了在生产时吸取包含臂长度
补偿量,示教时要求使夹持吸嘴的臂尖端位置在元件上部的高度。
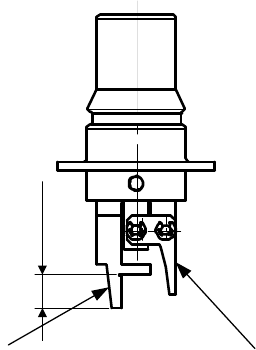
4) 在 ATC 上的安装方向
将夹持吸嘴安装到ATC上,使从正面看ATC装置时,夹持吸嘴的固定臂(图①)在后侧,摇臂(图
②)在前侧。
つめ深さ
②
①
卡爪深度
第 2 部 功能详细篇 第 13 章 程序补充
13-1
第 13 章 程序补充
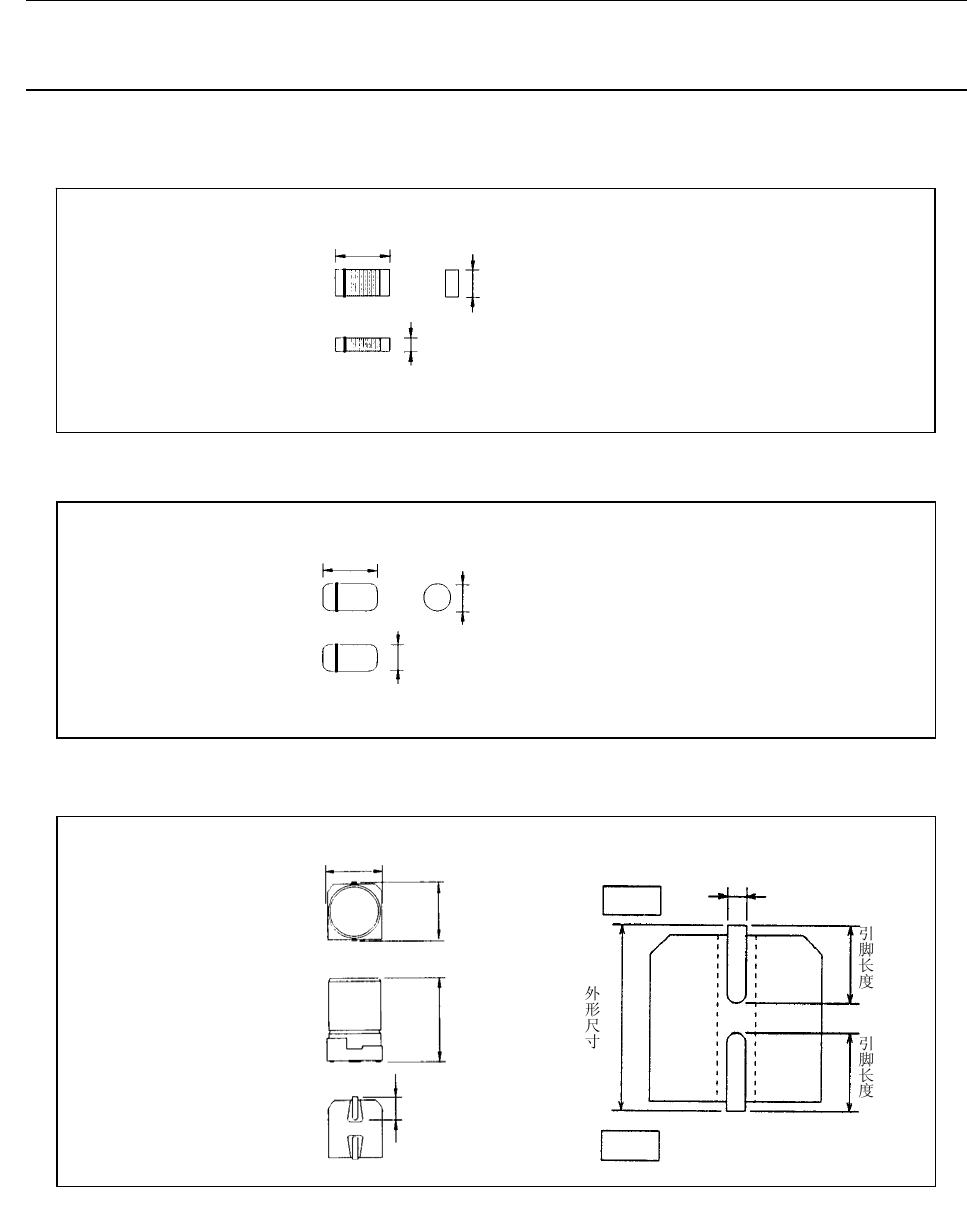
13-1 元件尺寸图例
· 方形芯片
· 圆筒形芯片
· 铝电解电容
外形尺寸 横
外形尺寸 纵
元件高度
外形尺寸 横
外形尺寸 纵
元件高度
引脚宽度
+侧
-侧
外形尺寸 横
元件高度
引脚长度
外形尺寸 纵