SIPLACE D2 规格说明书英文版 - 第9页
9 Modular Machine Concept Sample Configuration BZ Buffer zone C & P Collect & Place head COT Component changeover table G1 Gantry 1 G2 Gantry 2 NCH C&P Nozzle changer for the C & P head OP Op erator pane …
8
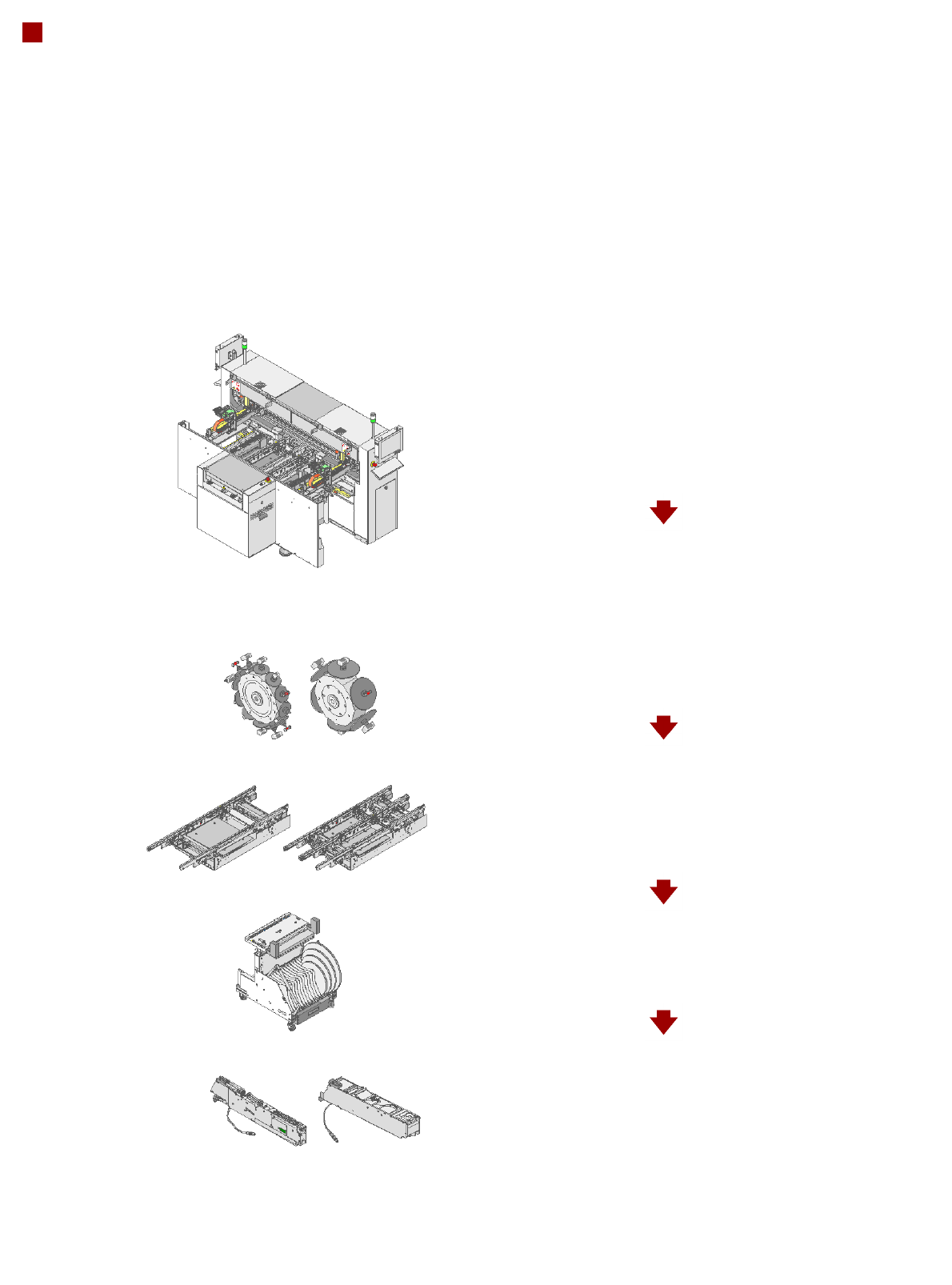
Modular Machine Concept
Step 1: Placement system with 2 gantries
Step 2: Selection of the placement heads
12-nozzle C&P head
6-nozzle C&P head
Step 3: Selection of the conveyor
Single conveyor
Flexible dual conveyor
Step 4: Selection of the
component changeover table
Step 5: Selection of the feeder modules
S tape feeder modules
9
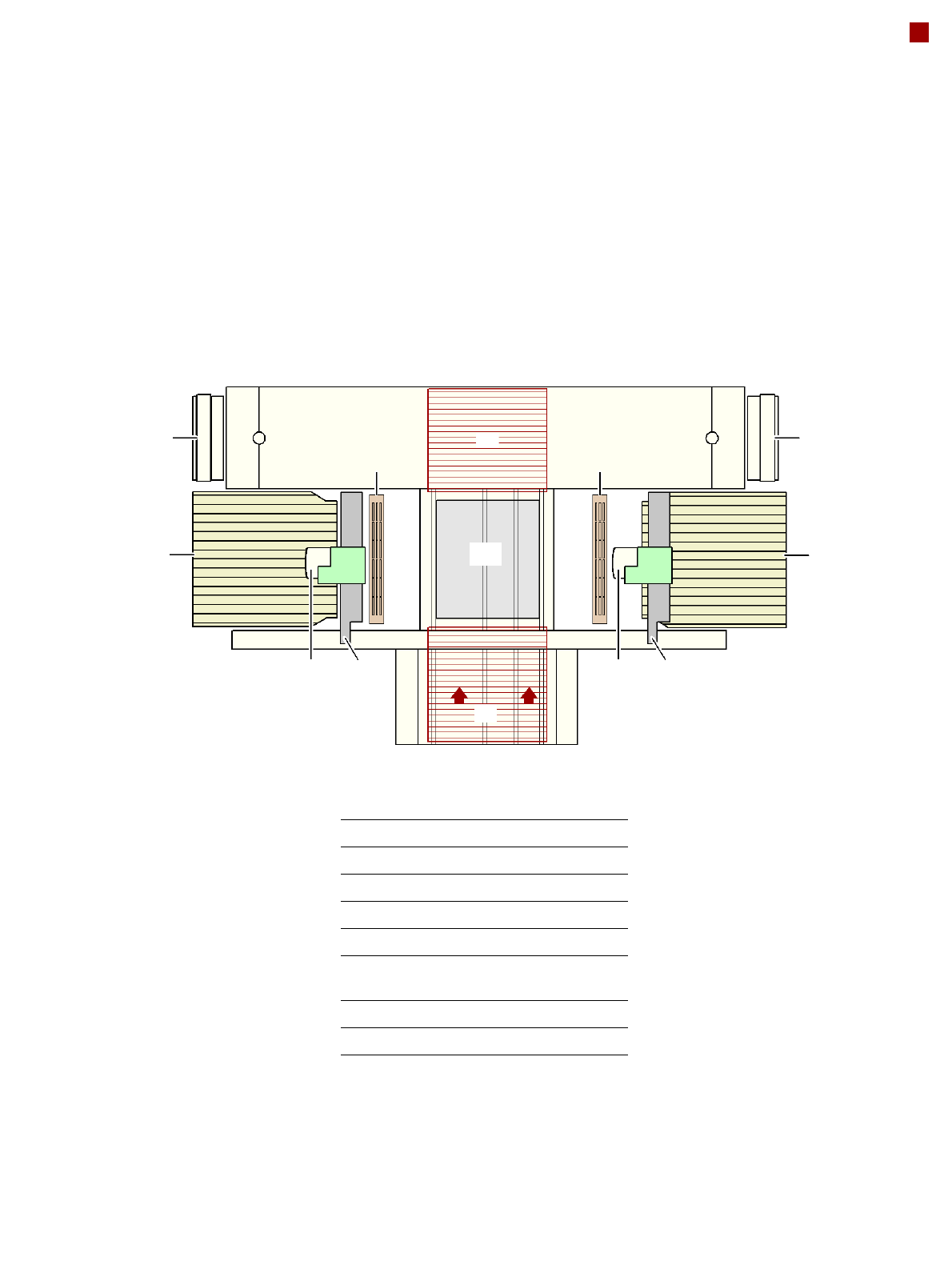
Modular Machine Concept
Sample Configuration
BZ Buffer zone
C&P Collect&Place head
COT Component changeover table
G1 Gantry 1
G2 Gantry 2
NCH
C&P
Nozzle changer for the C&P
head
OP Operator panel
PA Placement area
COT
NCH C&P
COT
C&P
BZ
BZ
OP OP
NCH C&P
C&P G2 G1
PA
10
Head Modularity
Overview
The SIPLACE D2 is charac-
terized by maximum flexibil-
ity in the production process.
This flexibility is partly due to
the head modularity of the
placement machine as it
allows different placement
head variants to be config-
ured to suit the production
requirements.
The placement heads on the
D2 machines are configu-
rable:
• two 12-nozzle Collect &
Place heads or
• two 6-nozzle Collect &
Place heads or
• one 6-nozzle and one 12-
nozzle Collect&Place
head
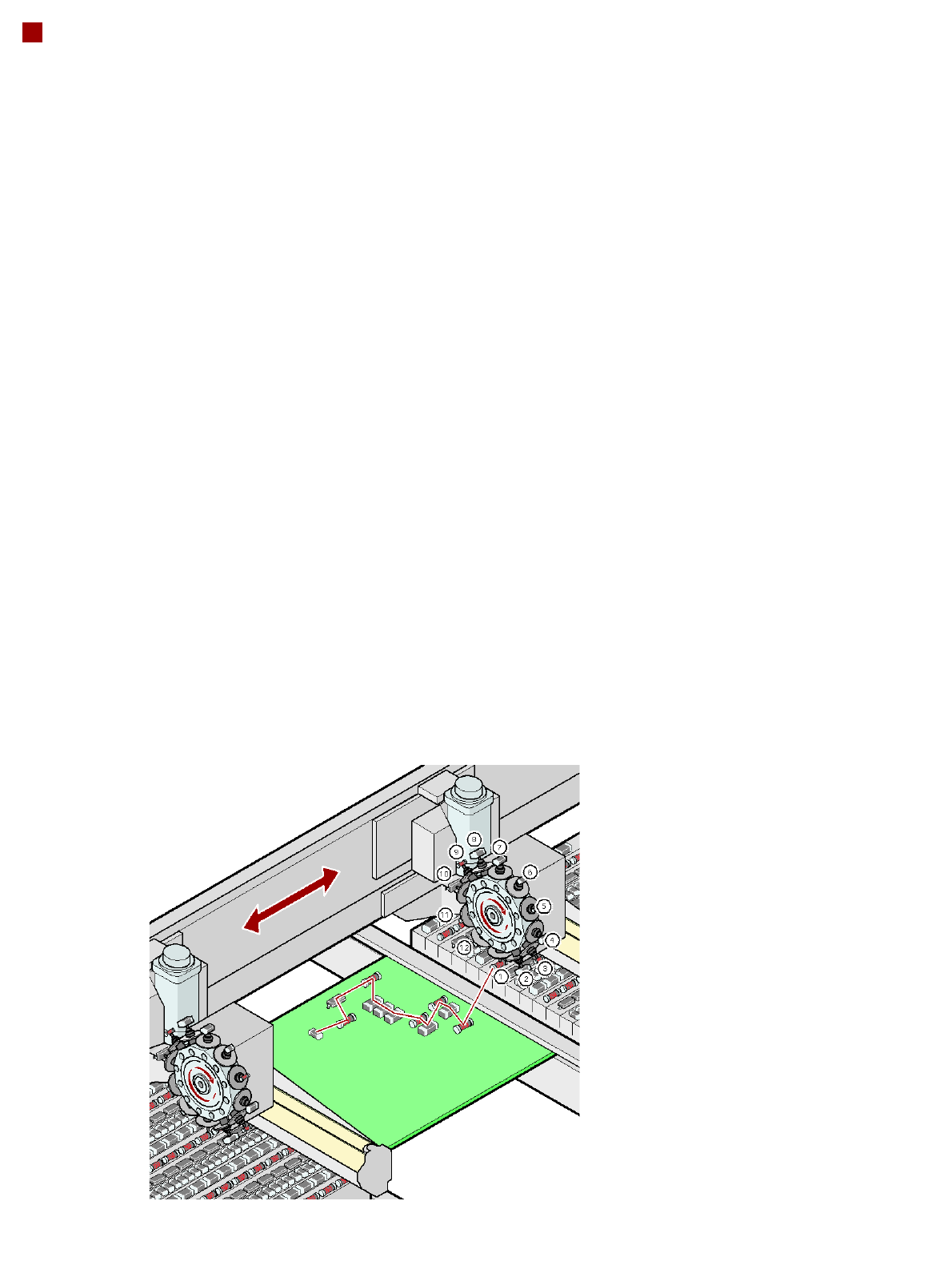
Collect&Place principle
The SIPLACE 12 and 6-noz-
zle Collect&Place heads
work on the Collect&Place
principle. This means that,
within each cycle, 12 or 6
components are picked up
and "collected" by the place-
ment head, are optically cen-
tered on the way to the board
and are rotated into the
required placement angle.
They are then placed gently
and accurately on the PCB.
This principle is particularly
suitable for the high-speed
placement of standard com-
ponents.
Checking and self-learning
functions
The SIPLACE placement
heads' reliability can be fur-
ther increased with various
checking and self-learning
functions.
• Component sensor
It checks for the presence
of a component at the
nozzle before and after the
pick-up and placement
process.
• Digital camera on the
placement head
Checks the position of
each component at the
nozzle.
Any deviations from the
required pick-up position
are corrected before
placement takes place.
• Force sensor
Monitors the specified
component set-down
forces. With the sensor
stop method, differences
in height during pick-up
and any unevenness of
the PCB surface are com-
pensated during place-
ment.
• Vacuum sensor
Checks whether the com-
ponent was picked up or
set down correctly.
Collect&Place principle