西门子SIPLACE S25 HM-设备性能参数_EN - 第9页
7 12-Nozzle Colle ct & Place He ad for High Speed Plac ement Component Pick-Up/ Placement Segment Removal Point Turning to the Placement Position Component Vision Description The 12-Nozzle placeme nt head operates on…
6
Placement Heads:
Placement Accuracy
Component Range
Placement Accuracy
a
Placement Head
Placement Accuracy
12-Nozzle
Collect & Place Head
6-Nozzle
Collect & Place Head
X/Y Accuracy 67.5 µm 60 µm
3
Sigma
Rot.-Accuracy 0.525° 0.225°
X/Y Accuracy 90.0 µm 80.0 µm
4
Sigma
Rot.-Accuracy 0.700° 0.400°
X/Y Accuracy 135.0 µm 120.0 µm
6
Sigma
Rot.-Accuracy 1.050° 0.450°
a) As defined in “Scope of Service and Delivery SIPLACE”.
Component Range
12-Nozzle
Collect & Place Head
6-Nozzle
Collect & Place Head
Component size
0.6 x 0.3 mm
2
b
to
18.7 x 18.7 mm
2
1.6 x 0.8 mm
2
to
32 x 32 mm
2
Max. component height 6 mm 8.5 mm
Max. component weight 2 gr 5 gr
Placement force 2.4 - 5.0 N 2.4 - 5.0 N
Performance See table on page 3 See table on page 3
Min. pitch lead / bump 500 / 350 µm 500 / 560 µm
Min. ball / bump diam. 200 µm 320 µm
b) 0201 (recommended to order the special 0201-kit).
7
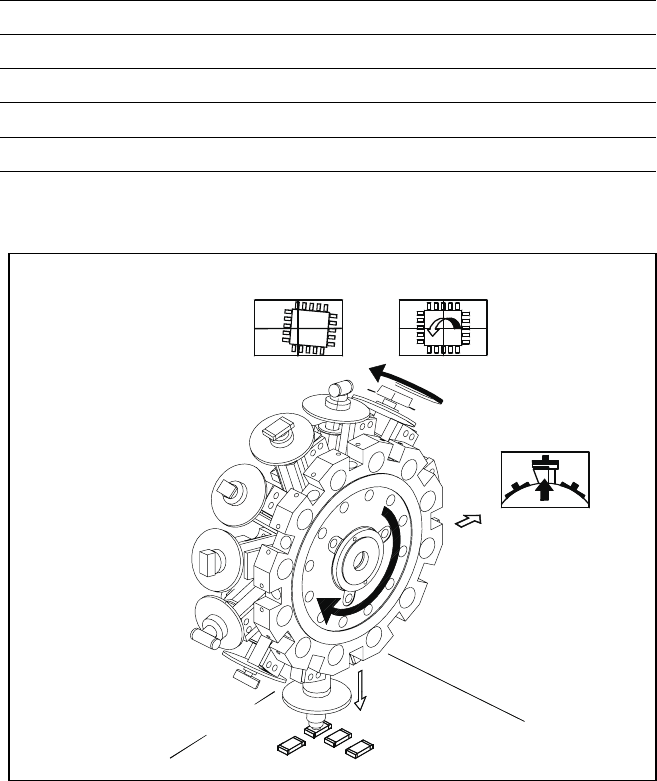
12-Nozzle Collect & Place Head for High Speed Placement
Component Pick-Up/
Placement
Segment
Removal
Point
Turning to
the Placement
Position
Component
Vision
Description
The 12-Nozzle placement head
operates on the Collect & Place
principle. In contrast to classic chip
shooters, the 12 vacuum nozzles
of the SIPLACE Collect & Place
head rotate around a horizontal
axis. This does not only save
space:
Due to the small diameter com-
pared to chip shooters, the cen-
trifugal forces are significantly
lower. The results are high-speed,
reliable placement and the same
cycle time for all components.
Components are picked up and
placed reliably with the aid of vac-
uum followed by a gentle air kiss.
A number of vacuum tests moni-
tors if the component has been
picked up and placed accurately.
Various control and self-learning
functions further enhance the de-
pendability of the system:
§ The optical recognition of feeder
positions records the exact posi-
tion of the feeder table.
§ A camera on the placement head
(component vision module) de-
termines the exact position of
each component on the nozzle.
§ For every feeder the pick-up
offsets are averaged over the
last ten pick-ups. This enables
the head to dial-in on the pre-
cise pick point for each compo-
nent.
§ In addition, the package form is
also checked. If the actual geo-
metric dimensions of the com-
ponent do not correspond to
those programmed, the compo-
nent is rejected.
§ Components rejected by the vi-
sion system are dumped into a
bin, reject feeder or matrix tray.
Any rejected component gets
automatically placed during a
repair run.
§ Warpage of the PCB is accom-
modated by sensor stop acti-
vated z-axis placement. The sys-
tem also keeps the last ten
positions of the z-axis at com-
ponent placement and uses the
average of these values to im-
prove the drive down and place
speed of the cycle.
Placement Heads:
12-Nozzle Collect & Place Head for High Speed
Component Placement
Technical Data
Component range See table on page 6
Stroke of Z-axis max. 16 mm
Programmable placement force 2.4 to 5.0 N
Benchmark placement rate 12,500 cph (see also table on page 3)
Placement accuracy See table on page 6
8
Description
The 6-Nozzle placement head
operates on the Collect & Place
principle.
The cycle time of the 6-Nozzle
Collect & Place Head – and thus
the real achievable performance
– depends on the dimensions and
the number of leads / bumps of
the component.
Mechanically and electrically, the
6-Nozzle Collect & Place Head is
structurally very similar to the 12-
Nozzle Collect & Place Head.
Placement Heads:
6-Nozzle Collect & Place Head for High-Speed
Large Component Placement
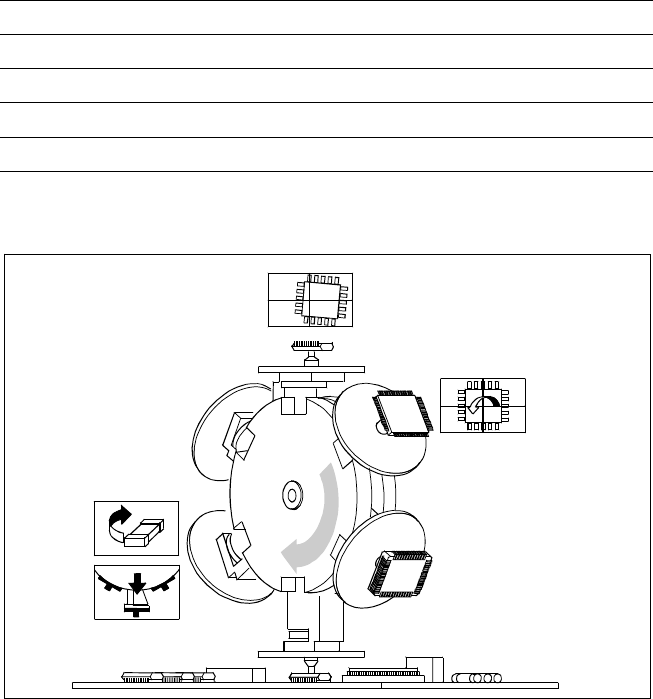
6-Nozzle Collect & Place Head for High Speed Placement of
large components
Optical
Centering
Component
Turning
Component
Rejection
Segment
Removal Point
Technical Data
Component range See table on page 6
Stroke of Z-axis max. 16 mm
Programmable placement force 2.4 to 5.0 N
Benchmark placement rate 8,500 cph (see also table on page 3)
Placement accuracy See table on page 6