NXTII机械手册.pdf - 第566页
9. 测定和调整 QD145-15 542 NXT II 机械手册 1. 将要调整的模组向前方拉出。 (请参考 「5.1 模组的拉出 / 插入」 。 ) 2. 打开传感器放大器的盖罩。 3. 请把输入模式设定为 「L-on」 (避光时 OFF) 。 请按下按键 (1) ,在 5 秒之内按下按键 (2) 。 4. 其次进行灵敏度的设定。 连 续 按 下M O D E按 键( 3 ) 3秒 左 右 , 再 按1次M O D E按 键( 3 …
QD145-15 9. 测定和调整
NXT II 机械手册 541
9.2.1 远程调整方法
使用附加软件调整传感器的灵敏度。用此方法 1 次就可以调整在模组上所有的搬运轨道传感
器。
1. 启动附加软件,请从 「前台显示屏」中选择对象的机器的名称。显示出注册画面。
2. 请直接输入用户 ID 或者从指定的选择框中指定。
3. 请正确地输入密码后单击 「注册」。
4. 选择进行调整传感器的模组后单击 「远程操作」。
5. 请选择 「调整搬运轨道传感器的灵敏度」。
6. 请确认电路板等的传感器是否有遮住后按下 「开始」按钮。进行选择模组的电路板通过
传感器的灵敏度的调整。
9.2.2 机器上的调整方法
操作机器上的各个传感器的放大器进行调整。
警告
模组刚运转后,请不要直接触摸线性马达的轴和线圈部分。有可能因高温被灼伤。
模组的线性马达有强力的磁性。使用心藏起搏器的用户,请不要接近线性马达的轴或者
线圈部分 (请离开 400mm 以上进行操作)。有可能因为磁力造成心藏起搏器的误动。
注意
将 XY 机械手用手进行移动时,请抓住框架部分。抓住贴装工作头主体或者手柄时,请
请不要压住 X 轴的齿轮盖罩。因为齿轮盖罩有可能变形。
在模组的线性马达附近请不要将工具等靠近。有时会因磁力吸引而产生以外的受伤。
在模组的线性马达附近 (55mm 以内 ) 操作时,请不要使用通常的工具。请使用非磁性的
工具。
在模组的线性马达附近 (55mm 以内 ),请不要将磁卡、手表、精密仪器等靠近。有可能
因磁力而产生故障。
在进行工作头更换和维修保养操作时,请注意不要将物品碰到线性马达上 , 会造成损
伤,如果在线性标尺上发生了伤痕或者错误时 , 有可能不能生产。那时,有必要更换线
性马达。
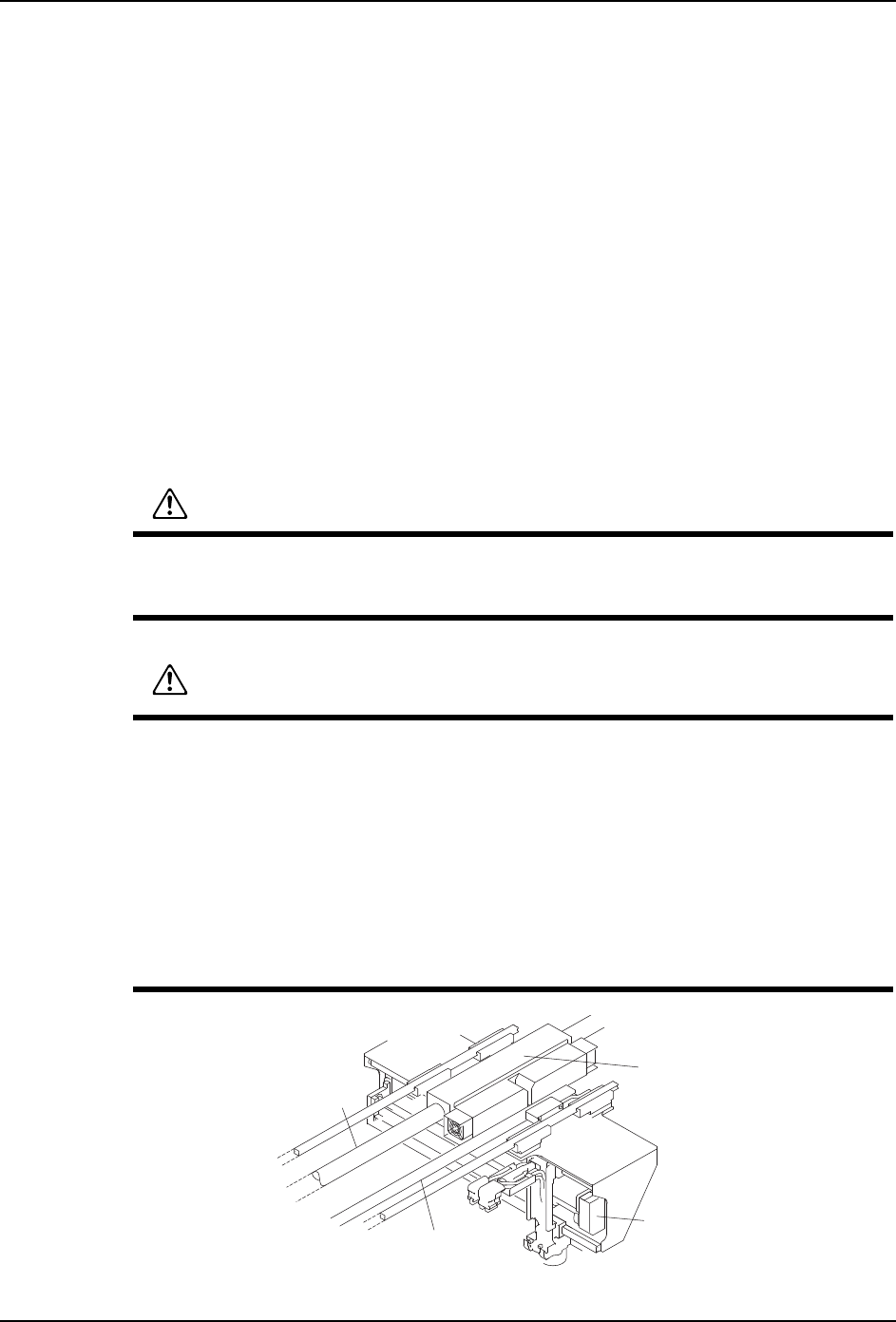
01MEC-0324Sb
㒓ᗻᷛሎ
;䕈啓䕂Ⲫ㔽
㒓ᗻ偀䖒㒓䚼ߚ
㒓ᗻ偀䖒䕈
9. 测定和调整 QD145-15
542 NXT II 机械手册
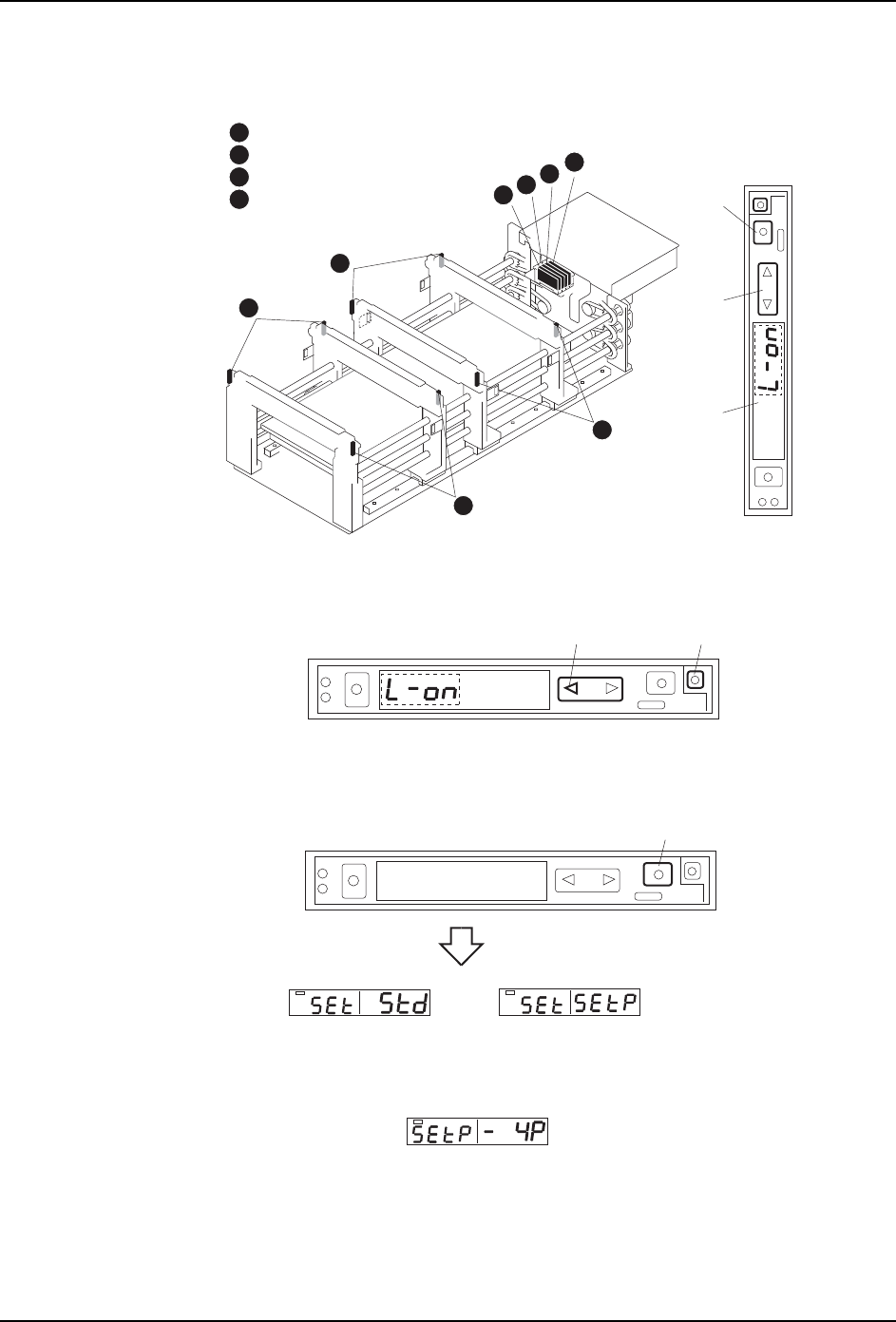
1. 将要调整的模组向前方拉出。(请参考 「5.1 模组的拉出 / 插入」。)
2. 打开传感器放大器的盖罩。
3. 请把输入模式设定为 「L-on」(避光时 OFF)。
请按下按键 (1),在 5 秒之内按下按键 (2)。
4. 其次进行灵敏度的设定。
连续按下MODE按键(3)3秒左右,再按1次MODE按键(3)后进入灵敏度设定画面。
5. 按下1次MODE按键。
6. 按下箭头键,设定数值为 「-4P」。
7. 按下1次MODE按键后决定。
8. 再次按下 1 次 MODE 按键。
9. 关闭传感器放大器的盖罩,将模组插入原来的位置。(请参考「5.1模组的拉出/插入」。)
1
2
3
4
2
4
1
3
01MEC-0336Sb
1
䗮䘧ࠡջᨀ䖤䔼䘧Ӵᛳ఼
.*
䗮䘧ৢջᨀ䖤䔼䘧Ӵᛳ఼
4*
䗮䘧ࠡջᨀ䖤䔼䘧Ӵᛳ఼
.*
䗮䘧ৢջᨀ䖤䔼䘧Ӵᛳ఼
4*
2
3
4
ᰒ⼎⬏䴶
ㆁ༈䬂
MODEᣝ䬂
01MEC-0337b
12
01MEC-0338Sc
㗙
MODEᣝ䬂(3)
01MEC-0340J
QD145-15 9. 测定和调整
NXT II 机械手册 543
9.3 模组用真空传感器的灵敏度调整
9.3.1 调整方法
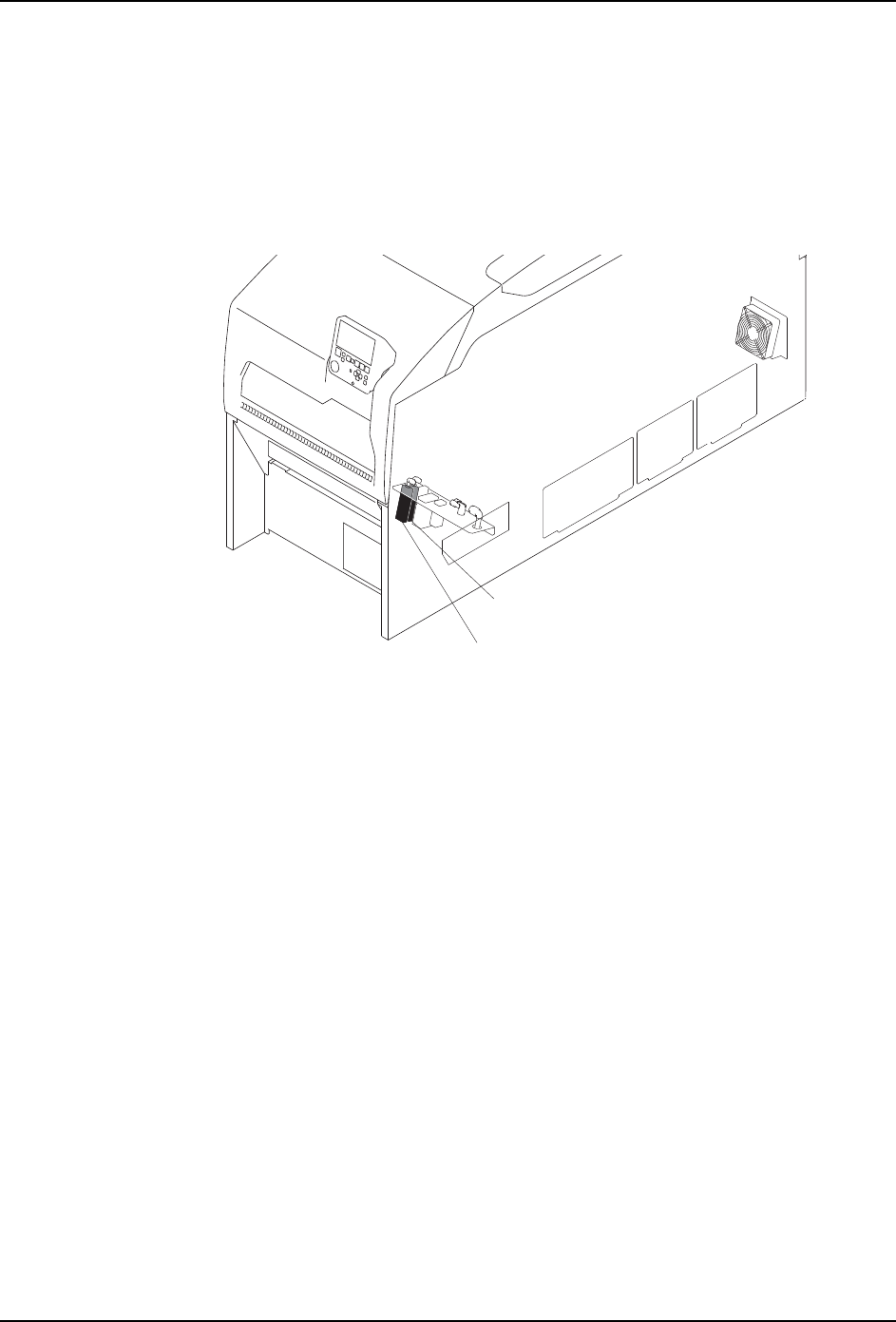
1. 请向前方抽出要调整的模组。(请参考 「5.1 模组的拉出 / 插入」。)要调整的模组在基
座的左端,而模组的左侧带有盖罩时,要将侧面的盖罩取下以腾出传感器附近的空间。
2. 模组压力传感器配置在前面左下方。这个位置上有编号的传感器有 2 个,从模组的前面
看过去位于后侧的一个为压力传感器。
3. 使用精密的一字型螺丝刀,将 MODE 开关变更到 “S1”。
4. 用螺丝刀调节 SET1 开关,使显示值为 -59。
备注 )变更 MODE 开关的设定只能变更显示,调整 SET1 或 SET2 开关后即使开关的值不被显示
出来,调整值也会被变更。
5. 用螺丝刀将 MODE 开关变更到 “S2”。
6. 用螺丝刀调节 SET2 开关,使显示值为 0.0。
7. 为了显示出现在的真空压,将 MODE 开关调回到 “ME”。
备注 )在未显示开关值的状态下变更开关时,在显示开关值后,务必将开关值调整至正确值。
8. 在取下侧面盖罩时,先把盖罩盖上,再把模组插入原来的位置。(请参考「5.1 模组的拉
出/插入」。)
01MEC-0304Sb
3693:0
36*3:0
㒘य़Ӵᛳ఼
㒘ⳳぎӴᛳ఼