KE-2070_2080 MS参数..pdf - 第48页
Rev.1.00c MS 参数 4-1.4. MSP 允许值 ※ 确认基板上面高度, 确认偏差值在 − 2 ∼ + 2mm 的范围内 。 如果偏差值超出此范围, 请调整 Z 电动机轴 与 Z 轴滚珠螺杆的位置关系,再次重新取得 MS 参数。 MSP 值不良时 No 项目 M S P 允许位置 异常位置 调整 ( 检查项目 ) 1 基板上面高度 0 ± 2mm 贴装精度不良 Z 轴马达组装 2 激光高度 ±1㎜ 贴装精度不良 Z 轴马达组…
Rev.1.00c
MS 参数
不需要调整时,不用演示。
准备完毕,请选择确定键。
选择确定之后,测定设定贴装头的基板上
面高度。
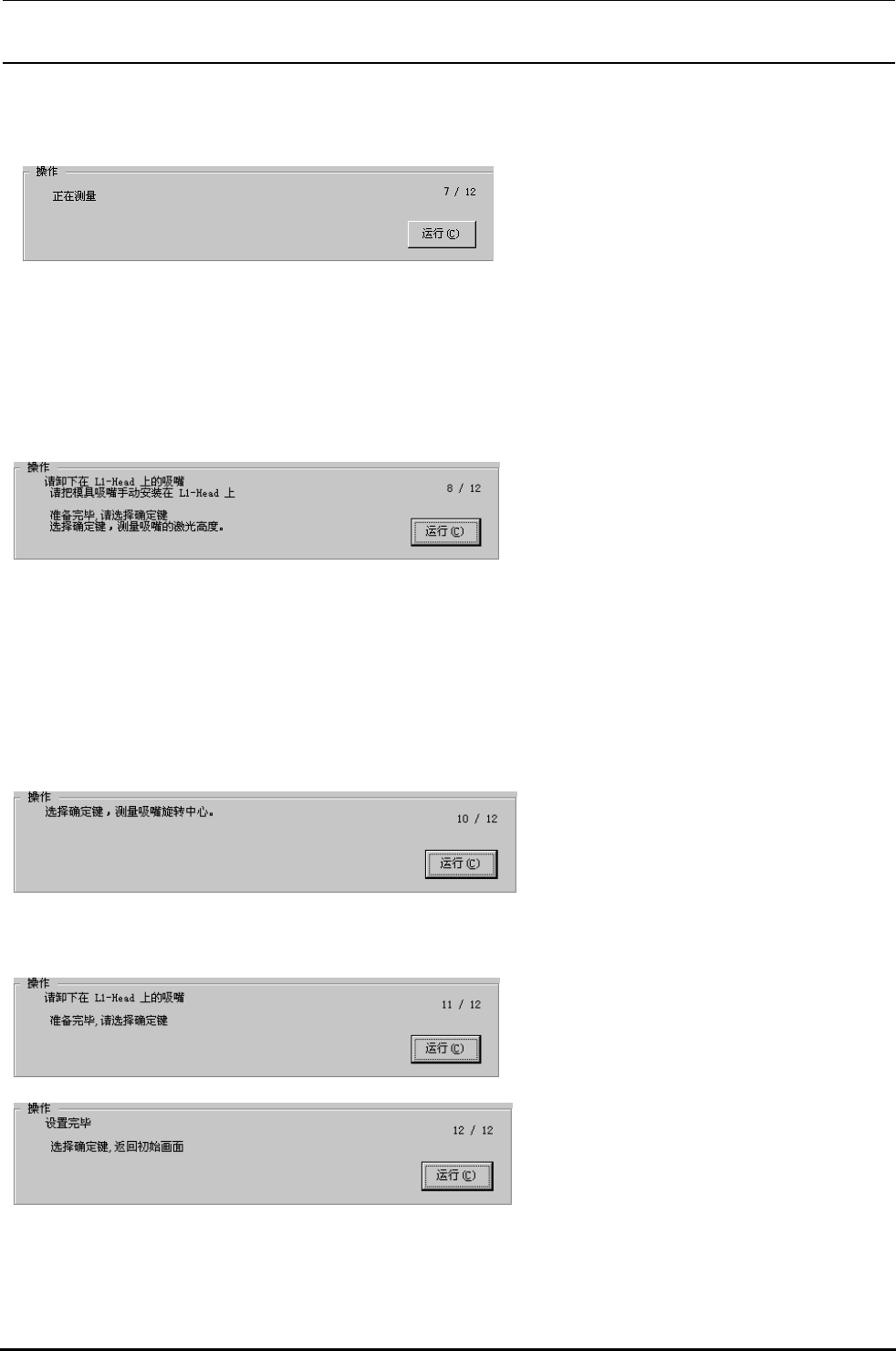
<操作・7/12>
自动测量开始。测量内容如下。
①打开贴装头的真空,读取真空值。此时,真空值-80Kpa 以下,为异常。请确认吸嘴。
②下降 Z 轴,测量真空-80Kpa 以下的位置。
③
计算②测定位置和测定用吸嘴的长度到基板上面的高度。
<操作・8/12>
从设定贴装头卸下吸嘴,设置治具吸嘴。
如果是
LNC 贴装头,请安装 LNC60 用
的治具吸嘴,如果是
IC 贴装头,则请安
装
IC 贴装头用的治具吸嘴。
准备完毕,请按确定键。
选择确定键之后,测定激光测定高度。
测定完毕后,从测定结果计算出激光高度
偏差。
<操作・10/12>
选择确定之后,用激光测定设定贴装头的
吸嘴旋转中心。(
IC 贴装头无吸嘴回转中
心,所以没有这一操作)
开始自动测定。
测定完毕,由测定结果计算出吸嘴旋转中
心。
<操作・11/12>
请从设定贴装头取下吸嘴。准备完毕,请
选择确定键。
<操作・12/12>
结束设定。
选择了确定键、返回初始画面。
4-5
Rev.1.00c
MS 参数
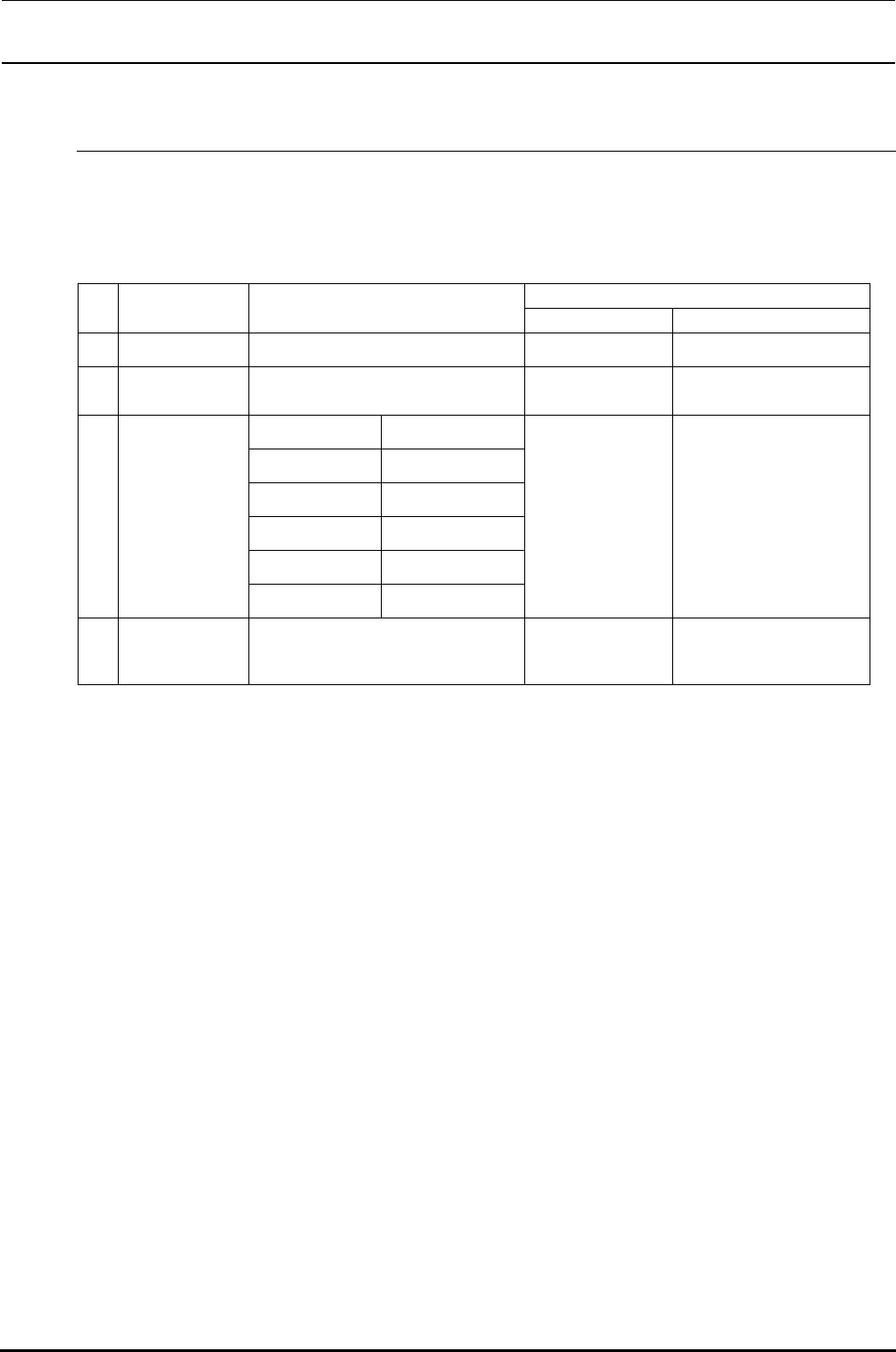
4-1.4. MSP 允许值
※ 确认基板上面高度,确认偏差值在−2∼+2mm 的范围内。如果偏差值超出此范围,请调整 Z 电动机轴
与 Z 轴滚珠螺杆的位置关系,再次重新取得 MS 参数。
MSP 值不良时
No
项目 MSP允许位置
异常位置 调整(检查项目)
1
基板上面高度
0±2mm
贴装精度不良 Z轴马达组装
2
激光高度
±1㎜
贴装精度不良 Z轴马达组装
激光传感器
L1 -42.5±1
L2 -25.5±1
L3 -8.5±1
L4 8.5±1
L5 25.5±1
3
吸嘴旋转中心
L6 42.5±1
同时吸附不良
贴装精度不良
贴装头吸嘴轴的安装
精度
激光传感器
4 角度偏差 -179°以上 180°以下 同时吸附时的吸
附异常错误
4-6
Rev.1.00c
MS 参数
4-2. OCC 偏差
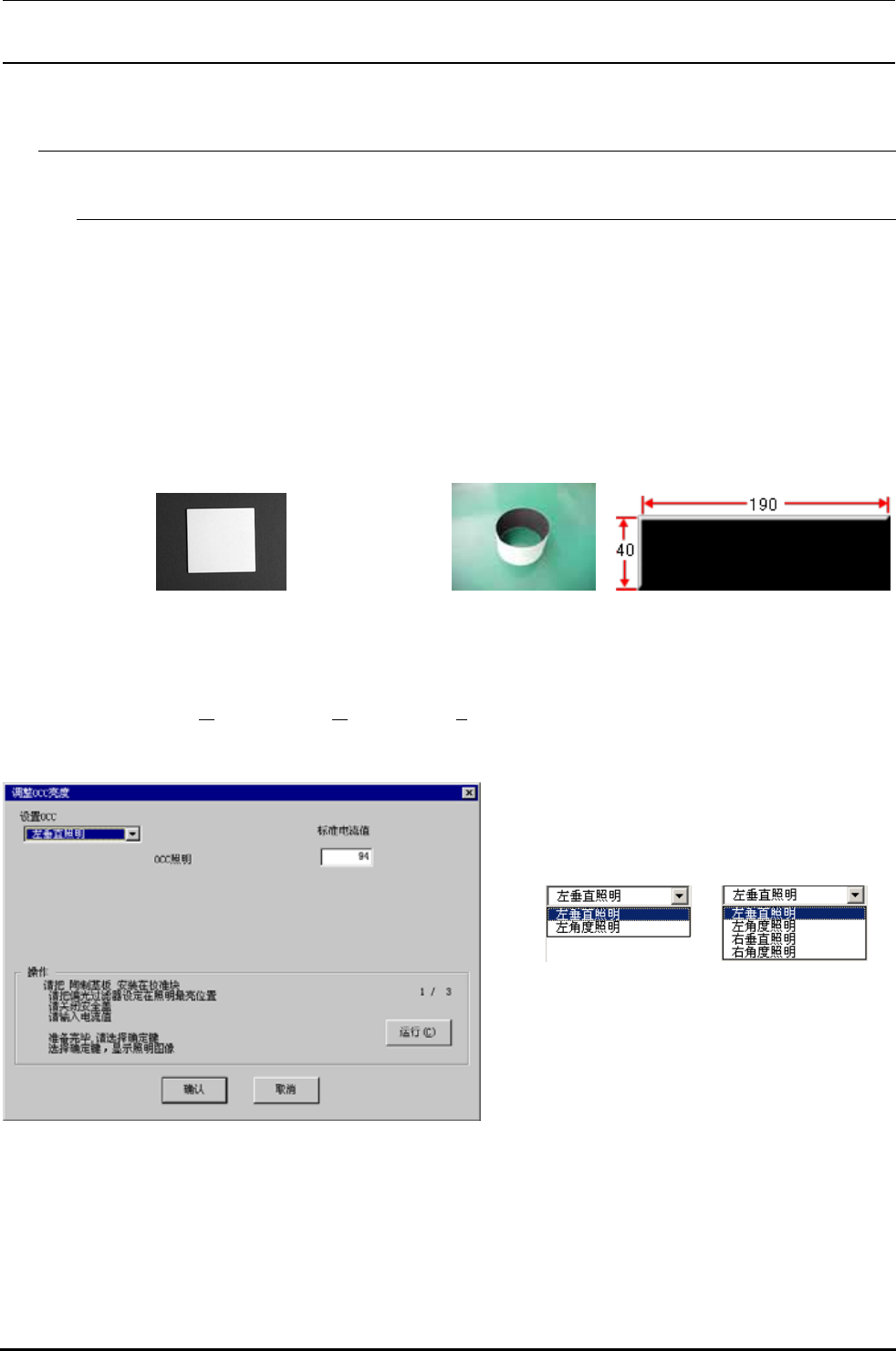
4-2.1. OCC 光量设定
实施焦点调整(确认)之后再进行设定。
4-2-1-1.功能.
调整 OCC 用照明 LED 的亮度。
4-2-1-2.使用治具
・陶瓷基板(2 英寸)(E2107998000) ·消杂光环 遮光环的尺寸
遮光环请用内侧为黑色的厚纸制作。
4-2-1-3.操作
选择了[偏差设定(
O)][OCC偏差(O)][光量调整(L)...]之后,显示出下面的光量调整画面。
<操作・1/3>
按 Alt +↓键,下面的一览显示出来。
在凸起画面上,选择设定对象 OCC。
(KE-2070) (KE-2080)
※对机器设置的使用装置的设定没有
影响
。没有检查(设定为不使用)的装置也
可以选择。
4-7