KE-2050_QA表.pdf - 第25页
机 种 向CAL 块 上移 动 HMS 传感器 , 拧 松2 处 的螺 丝 cap, 把 传感器 下面和CAL 块 上面的距离 调整 成 规格 值, 拧紧螺丝 cap, 进行 固定。 垂直 传感器 下面和CAL部上面的距离 此 时 ,确 认 FAR灯和NEAR灯均亮灯。 → 40±0.2mm ・高度 测定错误 NO ① ② NO. 担当人 ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ 【 3 】 - 1 QA表 NO. 1 (1/2) NO. 1 (…
QA表 NO. 3 NO. 3 (2/2)
机种
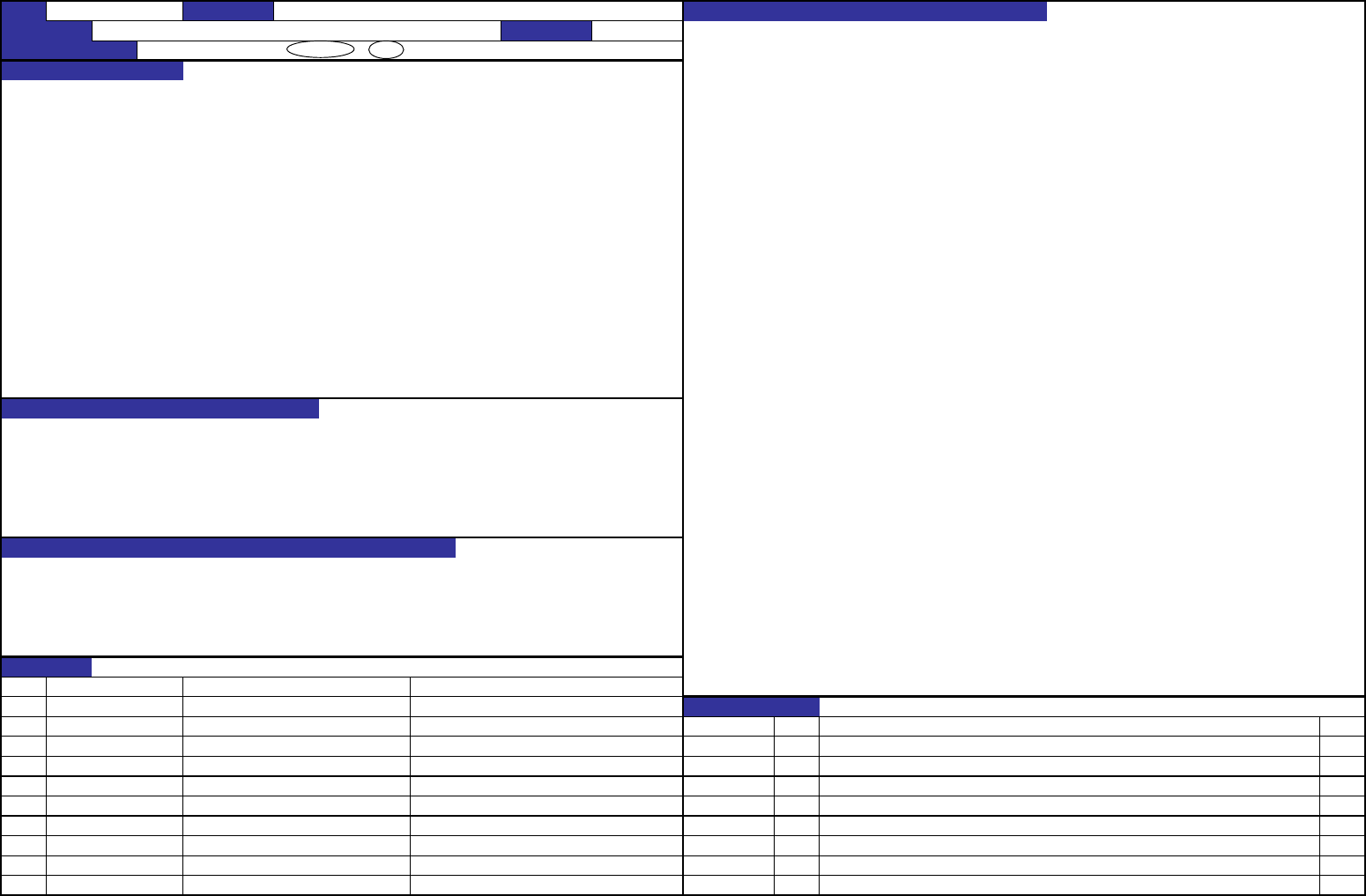
① 执行MS参数的OCC摄像机补偿(主,从两者),确认是否符合以下规格。
OCC摄像机补偿(角度)=-1.2~0.4°
OCC摄像机补偿(角度)=-1.2~0.4° (注)如果不符合规格,再次获取,使摄像机调整夹具在监视器上显示为正圆,确认和窗口没有接触。
输入错误值的情况下,监视器所显示的部品框等会发生倾斜或偏移。
① 标记识别精度恶化
② 发生标记识别异常
③ 监视器所显示的部品框发生倾斜或偏移。
NO
①
②
NO. 担当人
③ 16
④
⑤
⑥
⑦
⑧
⑨
⑩
【2】-3
内容
2004.01.23
新设定
E2106998000
摄像机调整夹具
日期
40001212
摄像机组装
变更履历
货号
品名
有关质量特性
对象元件
预想故障(应规格调整值不良而发生的故障)
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
确认方法及调整方法(故障处理方法)
功能名称 OCC摄像机补偿调整(角度) 编制日期 2002/9/30
KE-2050/KE-2060 装置名称 OCC装配
机种
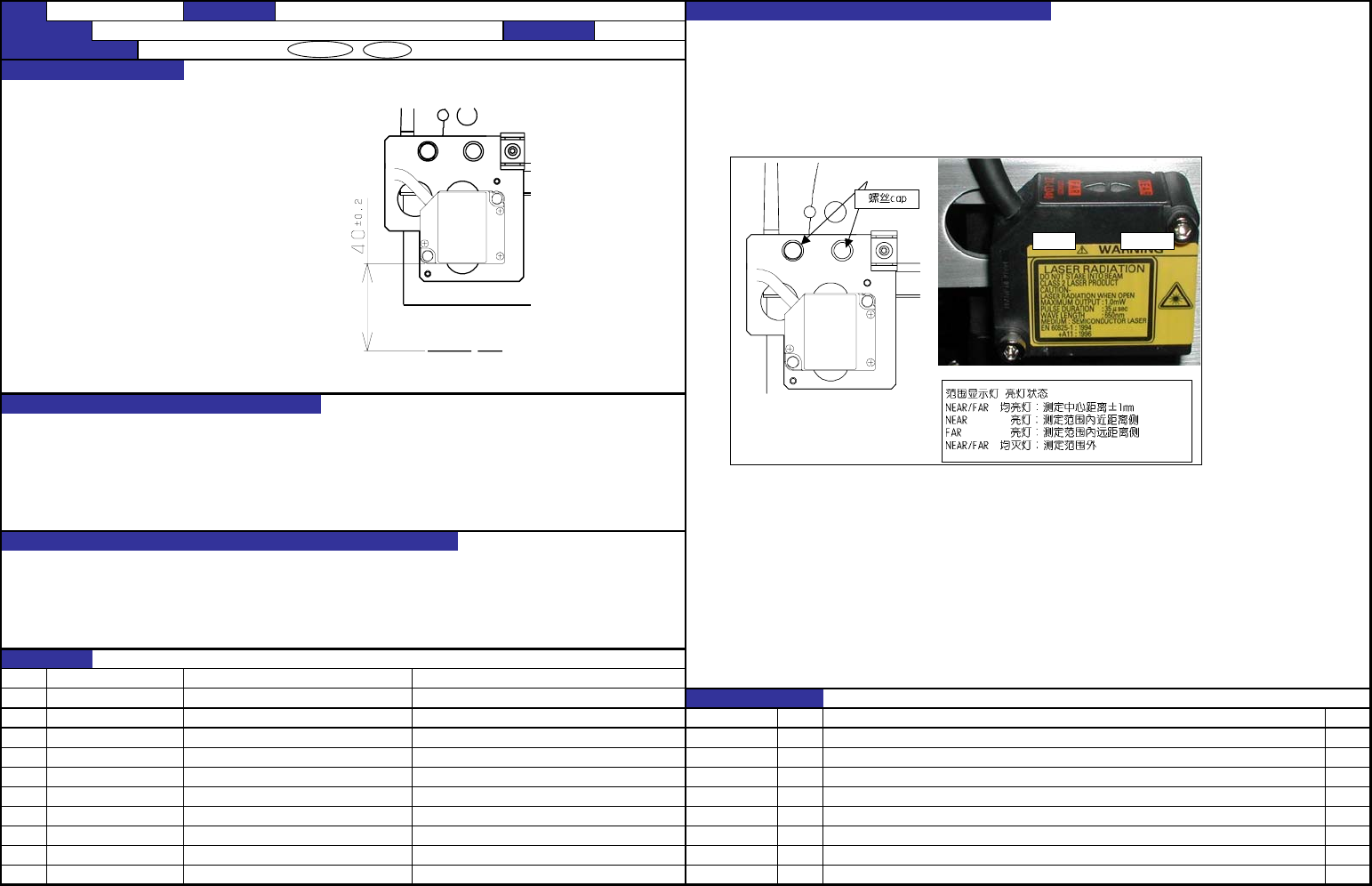
向CAL块上移动HMS传感器,拧松2处的螺丝cap,
把传感器下面和CAL块上面的距离调整成规格值,
拧紧螺丝cap,进行固定。
垂直传感器下面和CAL部上面的距离 此时,确认FAR灯和NEAR灯均亮灯。
→ 40±0.2mm
・高度测定错误
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【
3
】
-
1
QA表 NO. 1 (1/2) NO. 1 (2/2)
KE-2050/60 装置名称 HMS
确认方法及调整方法(故障处理方法)
功能名称
HMS传感器高度调整
编制日期
2002/9/4
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
对象元件
变更履历
货号
品名
有关质量特性
内容
2002.10.09
新设定
日期
CALブロック上面
CAL部上面
セムス
cap
FAR
灯
NEAR
灯
レンジ表示灯
点灯状態
NEAR/FAR 両点灯:
測定中心距離±1mm
NEAR 点灯:
測定範囲内近距離側
FAR 点灯:
測定範囲内遠距離側
NEAR/FAR 両点滅
:測定範囲外
机种
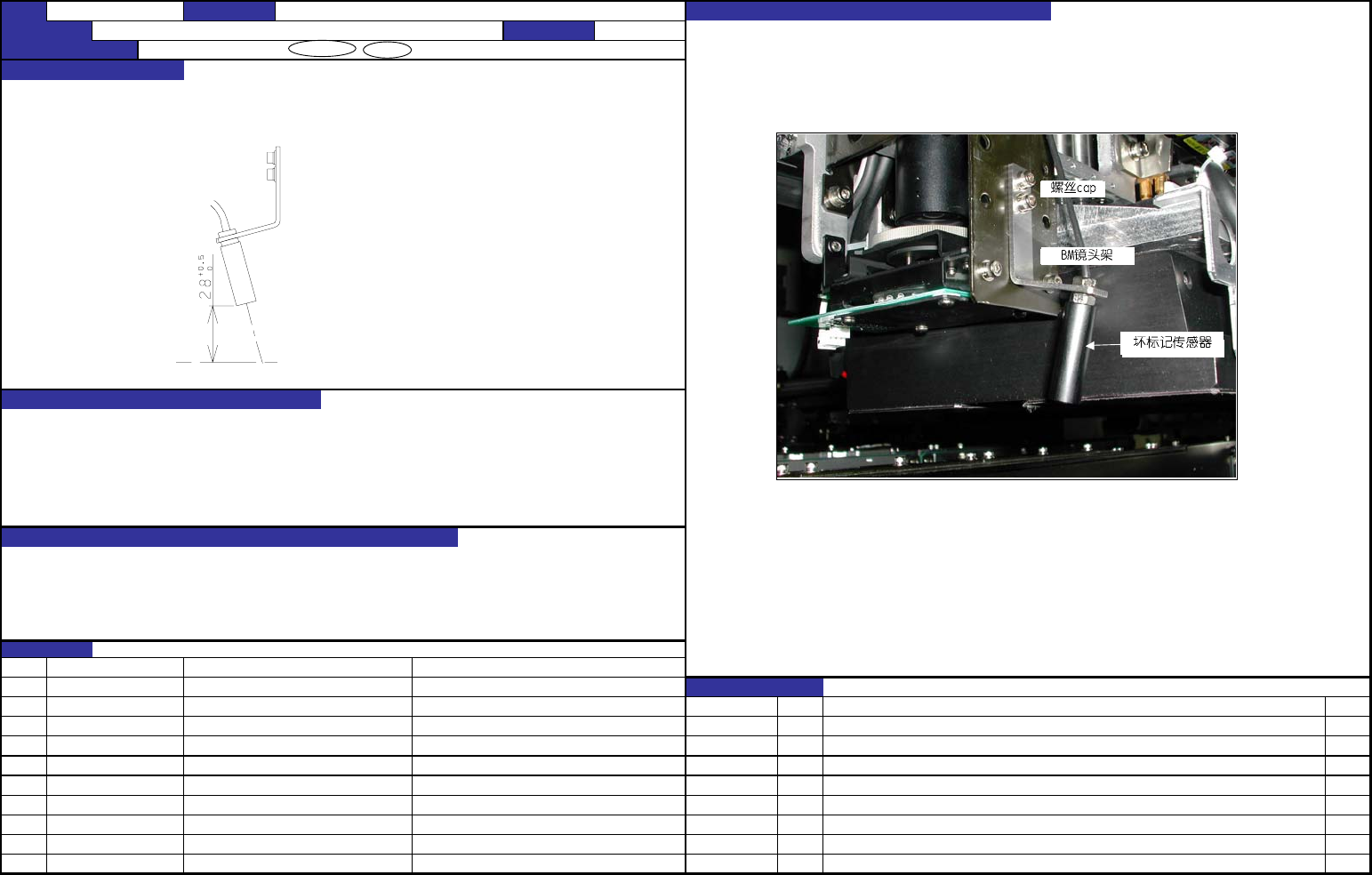
向CAL块上移动坏标记传感器,拧松螺丝cap(2处),
让坏标记传感器下面和CAL块上面的距离变为规格值
移动BM镜头架,然后用螺丝cap固定。
・坏标记传感器和CAL部上面的距离 →
28
mm
・坏标记的检测错误
NO
①
②
NO. 担当人
③ 梶並
④
⑤
⑥
⑦
⑧
⑨
⑩
【
4
】
-
1
QA表 NO. 1 (1/2) NO. 1 (2/2)
内容
2002.10.09
新设定
日期
变更履历
货号
品名
有关质量特性
对象元件
预想故障(应规格调整值不良而发生的故障)
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
功能名称
BMR传感器高度调整
编制日期
2002/9/4
KE-2050/60 装置名称
坏标记传感器 确认方法及调整方法(故障处理方法)
+0.5
0
CALブロック
上面
CAL部
上面
バッドマークセンサ
セムスcap
BMレンズホルダ