00192661-01 - 第229页
Betriebsanleitung SIPLACE F5/F5 HM 6 V isionfunktionen Softwareversion SR.407.xx Ausgabe 01/2001 DE 6.1 Die Visionsysteme am Autom aten 229 6.1.5 LP-Kamerasys tem Abb. 6.1 - 6 LP-Kameras ystem, Grundportal - Ansicht von …
6 Visionfunktionen Betriebsanleitung SIPLACE F5/F5 HM
6.1 Die Visionsysteme am Automaten Softwareversion SR.407.xx Ausgabe 01/2001 DE
228
6
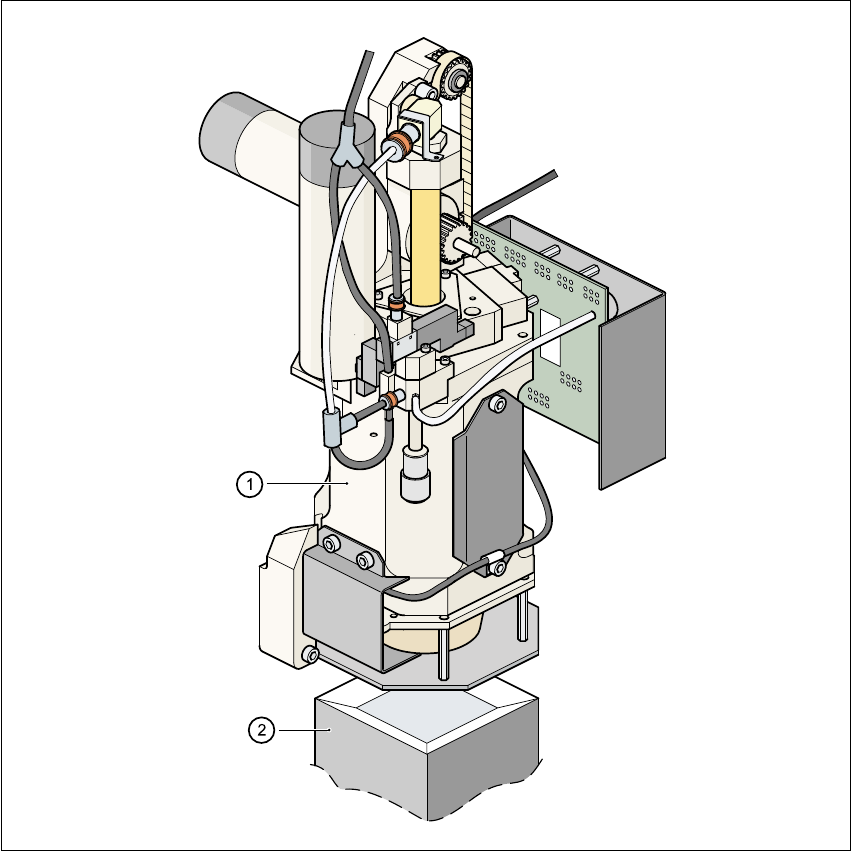
Abb. 6.1 - 5 BE-Kamerasystem am Pick&Place-Kopf
(1) Pick&Place-Kopf
(2) Fine-Pitch-Visionmodul
6
Das Fine-Pitch-Visionmodul ist rechts vom LP-Transport am Maschinenständer befestigt. 6
Mit dem BE-Kamerasystem lassen sich Bauelemente bis zu einer Größe von 55mm x 55mm op-
tisch zentrieren und bestücken. Das minimale Beinchenrastermaß darf 0,4mm betragen. Optional
kann neben dem Fine-Pitch-Visionmodul noch ein Flip-Chip-Visionmodul eingebaut werden. Da-
mit lassen sich Bauelemente bis zu einer Größe von 20mm x 20mm optisch zentrieren. Das mi-
nimale Beinchenrastermaß darf 0,25mm betragen. 6
Betriebsanleitung SIPLACE F5/F5 HM 6 Visionfunktionen
Softwareversion SR.407.xx Ausgabe 01/2001 DE 6.1 Die Visionsysteme am Automaten
229
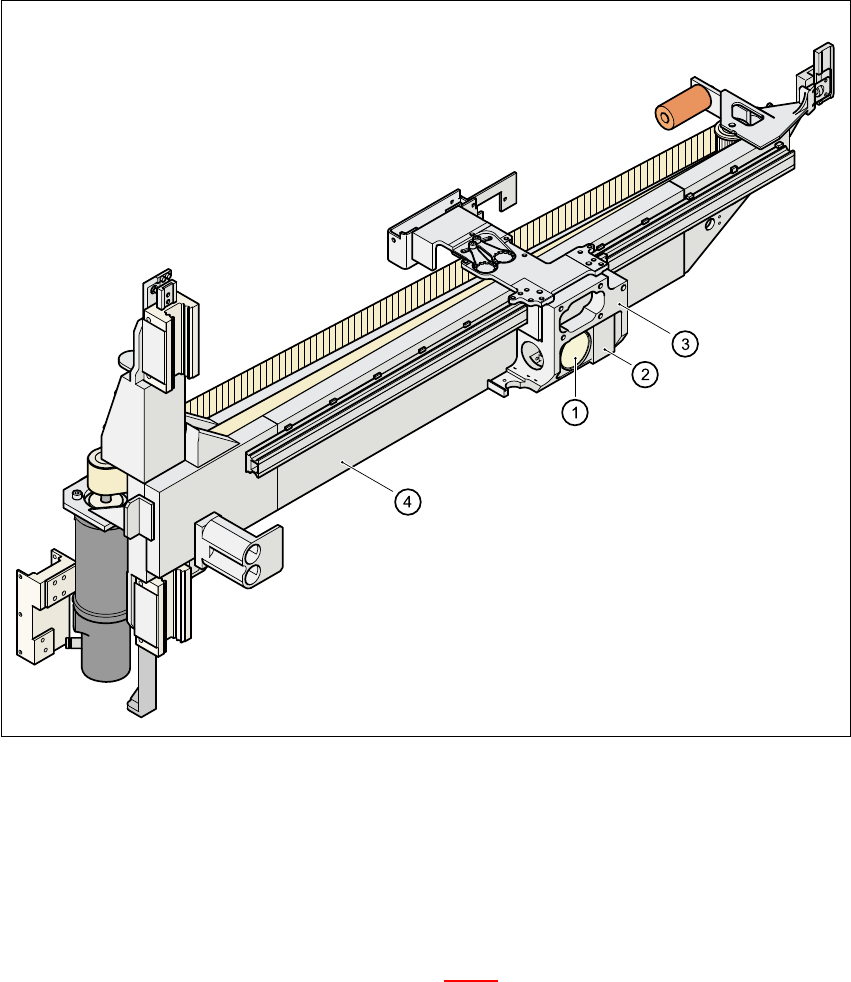
6.1.5 LP-Kamerasystem
Abb. 6.1 - 6 LP-Kamerasystem, Grundportal - Ansicht von unten
(1) LP-Kamera - Optik und Beleuchtung
(2) Kameraverstärker
(3) Kopfhalterung
(4) Portal
6
Das LP-Kamerasystem (siehe Pos. 1 und 2 in Abb. 6.1 - 6
) besteht im wesentlichen aus folgenden
Komponenten: 6
– Optisches Linsensystem
– CCD-Chip
– CCD-Kameraverstärker
– Eine Beleuchtungsebene zur Beleuchtung von LP-Marken und Inkpunkten

6 Visionfunktionen Betriebsanleitung SIPLACE F5/F5 HM
6.1 Die Visionsysteme am Automaten Softwareversion SR.407.xx Ausgabe 01/2001 DE
230
Das LP-Kamerasystem ist auf der Unterseite des Portals an der Collect&Place-Kopfhalterung be-
festigt. Es zentriert standardmäßig Leiterplatten einer Größe von 50mm x 50mm bis 460mm x
460mm (2" x 2" bis 18" x 18"). Die Leiterplattenstärke darf sich dabei im Bereich zwischen 0,5mm
und 4,5mm bewegen. 6
6.1.6 Visionauswerteeinheit
Die Visionauswerteeinheit (siehe Pos. 1 in Abb. 6.1 - 7) steckt im Steuereinschub des Automaten.
Sie verarbeitet und wertet die elektrischen Signale der BE- und LP-Kamerasysteme aus. Aus den
Sollwertabweichungen werden Korrekturwerte ermittelt, die in die Neuberechnung der Bestück-
positionen und Drehwinkel für die Bestückung eingehen. 6
Darüber hinaus führt die Visionauswerteeinheit eine Bauelementeidentifizierung durch. Stimmen
beispielsweise das synthetische Modell und die Messung der Gehäuseform nicht überein, wird
das Bauelement nicht bestückt. 6
Die exakte Bestimmung der Abhollage von Bauelementen, die insbesondere bei kleinen Bauele-
menten wichtig ist, wird ebenfalls in der Visionauswerteeinheit durchgeführt. Passmarken auf den
Zuführmodulen dienen zur Ermittlung der Lageabweichung der einzelnen Zuführmodule. 6
Die elektronischen Bildsignale von Bauelementen, LP-Passmarken und Zuführmodulmarken kön-
nen von der Visionauswerteeinheit über den Videomultiplexer an den Stationsbildschirm übertra-
gen und somit für Mess- und Testzwecke genutzt werden. 6
6
6
6
6
Legende zu Abb. 6.1 - 7
(1) Visionauswerteeinheit MVS 340
(2) COM1-Schnittstelle
(3) COM2-Schnittstelle
(4) HS
3
L-Schnittstelle
(5) Kameraanschlüsse:
1LP-Kamera
3 BE-Kamera, 6-Segment- bzw. 12-Segment-Collect&Place-Kopf
(6) Kameraanschlüsse
2 Fine-Pitch-Visionmodul
4 Flip-Chip-Visionmodul
6