00192661-01 - 第232页
6 Visionfunktionen Betriebsanleitung SIPLACE F5/F5 HM 6.2 LP-Visionsyst em Softwareversion S R.407.xx Ausgab e 01/2001 DE 232 6.2 LP-Visionsystem Das LP-Vision system er fasst die ge naue La ge der Le iterplatte du rch V…
Betriebsanleitung SIPLACE F5/F5 HM 6 Visionfunktionen
Softwareversion SR.407.xx Ausgabe 01/2001 DE 6.1 Die Visionsysteme am Automaten
231
6
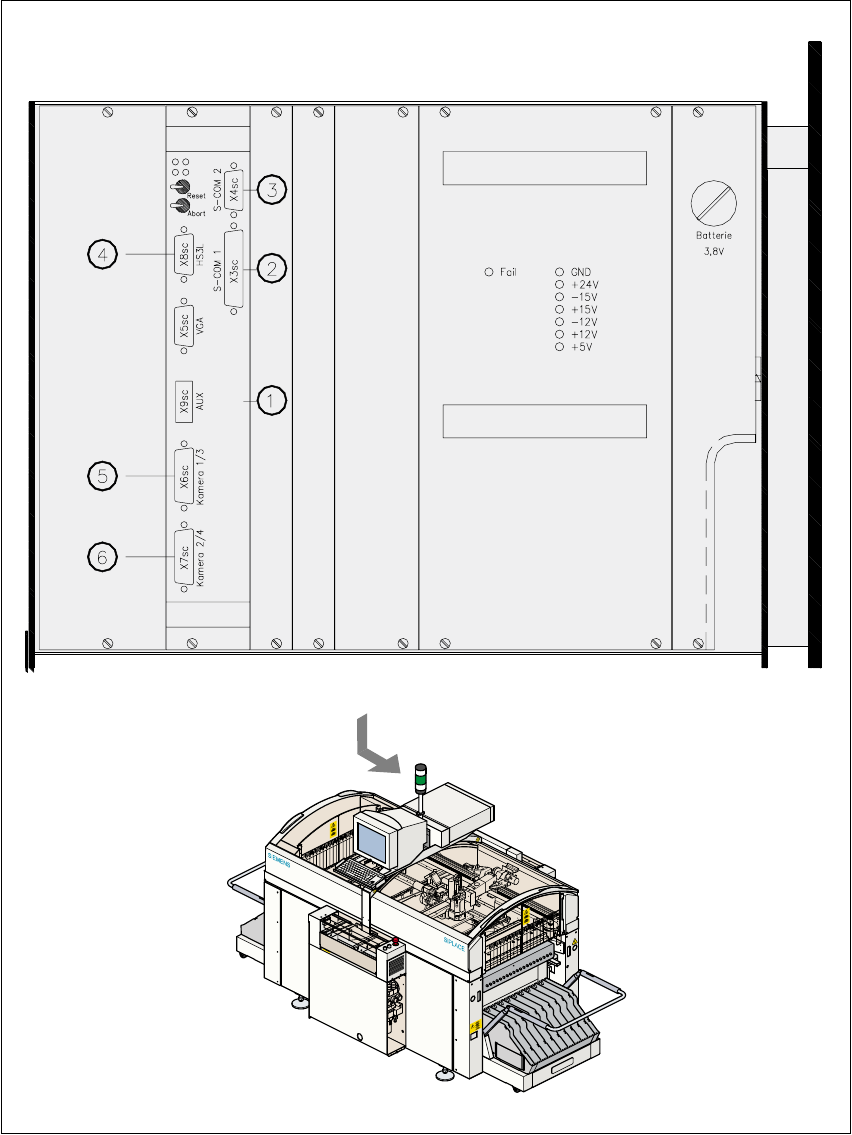
Abb. 6.1 - 7 Visionauswerteeinheit

6 Visionfunktionen Betriebsanleitung SIPLACE F5/F5 HM
6.2 LP-Visionsystem Softwareversion SR.407.xx Ausgabe 01/2001 DE
232
6.2 LP-Visionsystem
Das LP-Visionsystem erfasst die genaue Lage der Leiterplatte durch Vermessung von Passmar-
ken und ermittelt den Versatz in X- und Y-Richtung, den Verdrehwinkel relativ zur LP-Transport-
richtung und die Scherung der LP. Auch Ausschussmarkierungen (Inkpunkte), werden vom LP-
Visionsystem erfasst und ausgewertet. 6
6.2.1 Systembeschreibung
Das LP-Visionsystem zur Leiterplattenlageerkennung besteht aus dem optischen System zur Lei-
terplattenlageerkennung und der Visionauswerteeinheit 6
Optisches System zur Leiterplattenlageerkennung 6
Jedes Portal besitzt ein eigenes LP-Lageerkennungssystem (siehe Abb. 6.1 - 6, Seite 229). 6
Visionauswerteeinheit 6
Bei jedem Automaten ist im Steuereinschub eine Auswerteeinheit zur Leiterplatten- und Bauele-
mentelageerkennung untergebracht (siehe Abb. 6.1 - 7
, Seite 231). 6
Eine CCD-Kamera (SONY XC75-Kamera) mit integrierter Abbildungs- und Beleuchtungsoptik bil-
det das optische LP-Lageerkennungssystem. Das Gesichtsfeld des LP-Moduls beträgt 5,7mm x
5,7mm. Innerhalb der Maße der Gesichtsfelder kann ein Suchfeld in Lage und Größe frei pro-
grammiert werden. Die Abbildungsoptik ist eine spezielle Messoptik, die Messfehler aufgrund von
Leiterplattenwölbungen weitestgehend kompensiert. Die Beleuchtung wird nur während der Auf-
nahme von Passmarken eingeschaltet. 6
Die Visionauswerteeinheit (MVS) ist ein Einplatinensystem gemäß VME-Standard. Die Hardware
besteht aus dem 6
– MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen und dem
– MVS Kamerainterface für bis zu vier CCD-Kameras.
MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen 6
Auf der VME-Modulrückseite befinden sich die beiden Steckverbindungen für den VME-Bus. 6
An der Frontseite des VME-Moduls befinden sich die Anschlussstecker für 6
– den Bildschirm (VGA-Modus, 15-poliger SUBD-Stecker)
– die Hochgeschwindigkeitsschnittstelle (HS
3
L), 9-poliger SUBD-Stecker
– bis zu 4 Kameraeingänge (2 15-polige SUBD-Stecker)
– zwei serielle Schnittstellen (RS232 für COM1 mit einem 25-poligen SUBD-Stecker und für
Betriebsanleitung SIPLACE F5/F5 HM 6 Visionfunktionen
Softwareversion SR.407.xx Ausgabe 01/2001 DE 6.2 LP-Visionsystem
233
COM2 mit einem 9-poligen SUBD-Stecker)
– Trigger- und Flashsignale (10-poliger Flachbandkabelstecker)
und die Statusanzeige-LEDs für 6
– die CPU (CFG)
– den Visionprozessor (ACA)
– den Kameraeingang (BCA)
– die Bildschirmanzeige (DISP)
Die Schalter für ’RESET’ und ’ABORT’ finden Sie unterhalb der Anzeige-LEDs. 6
6.2.2 Technische Daten
Kamera-Typ: SONY XC75
Anzahl der Pixel: Kamera 768 (H) x 494 (V), Bild 640 (H) x 484 (V)
Gesichtsfeld: 5,7mm x 5,7mm
Beleuchtungsmethode: Auflichtverfahren (wird beim Messvorgang aktiviert)
Bildverarbeitung: Korrelationsprinzip, Grauwertesystem
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel des
Stationsrechners
Passmarken: Bibliotheksspeicher für bis zu 255 Markendefinitionen
6.2.3 Funktionsbeschreibung
Vor dem Bestücken werden Lage, Verdrehwinkel und Scherung der Leiterplatte aufgrund der Po-
sitionen der Passmarken vom LP-Visionsystem ermittelt. Abweichungen von den Sollwerten wer-
den dann als Korrekturen in die Bestückpositionen der Bauelemente eingerechnet. 6
Auf einer Leiterplatte müssen mindestens 2 Passmarken aufgetragen sein, damit das System Ab-
weichungen der LP-Position und des LP-Drehwinkels zu erkennen vermag. Bei Auftrag von
3 Passmarken erhalten Sie zusätzlich Informationen über Scherung und Verzug der Leiterplatte
und des Leiterplattenlayouts. 6
6.2.4 Funktionsablauf
Bevor eine Marke zur LP-Erkennung verwendet werden kann, muss sie zunächst ’geteacht’ wor-
den sein, d. h. die Markenstrukturparameter müssen im LP-Visionsystem für das Muster abge-
speichert sein. 6
Mit der am Portal angebrachten LP-Vision-Kamera und dem Visionprogramm wird die Marken-
struktur geteacht. Die Visionauswerteeinheit ermittelt mit Methoden der digitalen Bildverarbeitung
die signifikanten Markenstrukturparameter. Das Messverfahren läuft in 2 Stufen ab: 6