KE-2050R_OPE.pdf - 第283页
第 4 章 生产程序制作 2 ) 正在执行贴片坐 标位置摄像机跟 踪 刚执行后,在各 贴片坐标 的跟踪中显示如 下的对话 框。 图 4-5-41 正在进行 贴片位置摄 像机跟踪 ① 状态 ( 1 ) 跟踪模式 显示用传送方法 设定的“ 手动”或“自动 ”。 (2) 跟踪范围 当选择所有贴片数据时, 显 示 “最初” 、 “最后” 。 当变更了跟踪范围时, 显 示其编号。 (3) 跟踪状态 “动作中” 表示轴正在移 动中。 “暂停” 表示…
第 4 章 生产程序制作
4-5-4-4-3 坐标类:贴片位置
通过摄像机跟踪
贴片位置。确认监视器中显示的贴片位置,当输入坐标不准确时,可通过示教进行修正。
1) 条件设定
从菜单栏中选择“机器操作”/“确认”/“坐标类”/“贴片位置”,显示如下画面。
图 4-5-40 贴片坐标位置摄像机跟踪
① 跟踪方法(传送方法)
(1) 自动传送(自动跟踪)
以一定的间隔,依次用摄像机捕获贴片位置。在以下的“自动传送间隔”设定的时间
停止,经过该设定的时间后移动到下一点。
●自动传送间隔:调整停止间隔。可设定的范围为0.01秒~5秒。
(2) 手动传送(手动跟踪)
按下HOD的“NEXT”键或<开始>按钮,向下一点移动。
② 跟踪范围
输入是否将贴片数据的第几点到第几点作为跟踪范围进行跟踪。默认值为对所有贴片点进
行。
进行了所有跟踪条件的设定,准备完成后,按下<开始>按钮或“执行”。
按下“关闭”,返回原来的画面。
4-135
第 4 章 生产程序制作
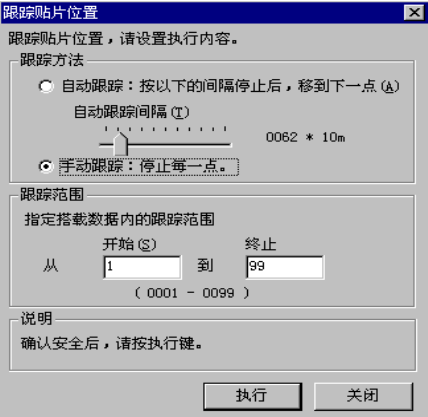
2) 正在执行贴片坐标位置摄像机跟踪
刚执行后,在各贴片坐标的跟踪中显示如下的对话框。
图 4-5-41 正在进行贴片位置摄像机跟踪
① 状态
(1) 跟踪模式
显示用传送方法设定的“手动”或“自动”。
(2) 跟踪范围
当选择所有贴片数据时,显示“最初”、“最后”。当变更了跟踪范围时,显示其编号。
(3) 跟踪状态
“动作中”表示轴正在移动中。“暂停”表示处于自动传送中的暂停中。“停止”表
示手动传送或有意识的停止。“轴待避中”表示正在将轴移动到安全位置。“标记识
别中”表示正在识别IC标记。
(4) 停止剩余时间
显示自动传送中的暂停剩余时间。
② 当前的贴片位置
显示当前的贴片信息。
“站台”在本装置中不显示。
③ 贴片坐标
是跟踪中的贴片坐标。坐标值可用手动输入或通过示教来变更。
④ 设定/取消
通过手动输入或示教而变更坐标值后生效。当按下“设定”时,储存贴片坐标。当不想保
存变更值时,请按下“取消”。
⑤ 整体的跟踪位置
根据跟踪位置的进展情况逐一进行。在停止时,可通过自由移动该滑块返回上一点或进入
下一点。
4-136
第 4 章 生产程序制作
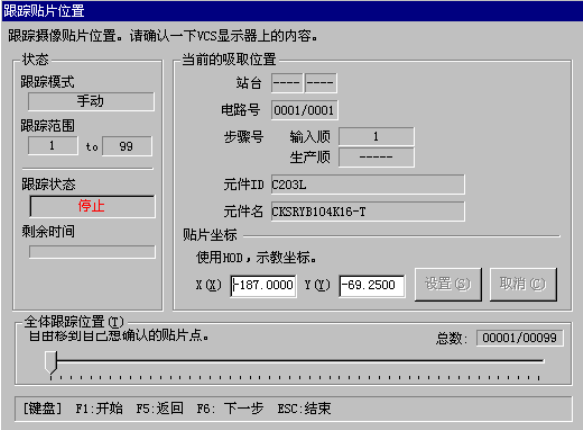
3) 跟踪时的坐标示教
当跟踪的坐标与实际不同时,可用HOD进行贴片坐标的示教。
<步骤>
① 将光标移动到 X 或 Y 坐标。
② 按 HOD 装置按钮,进行坐标示教,然后按 ENTER 键确定。
图 4-5-42 正在进行示教
③ 要使确定的坐标值有效时,按下<设定>或再次按下 ENTER。
返回坐标时,按下<取消>或CANCEL。
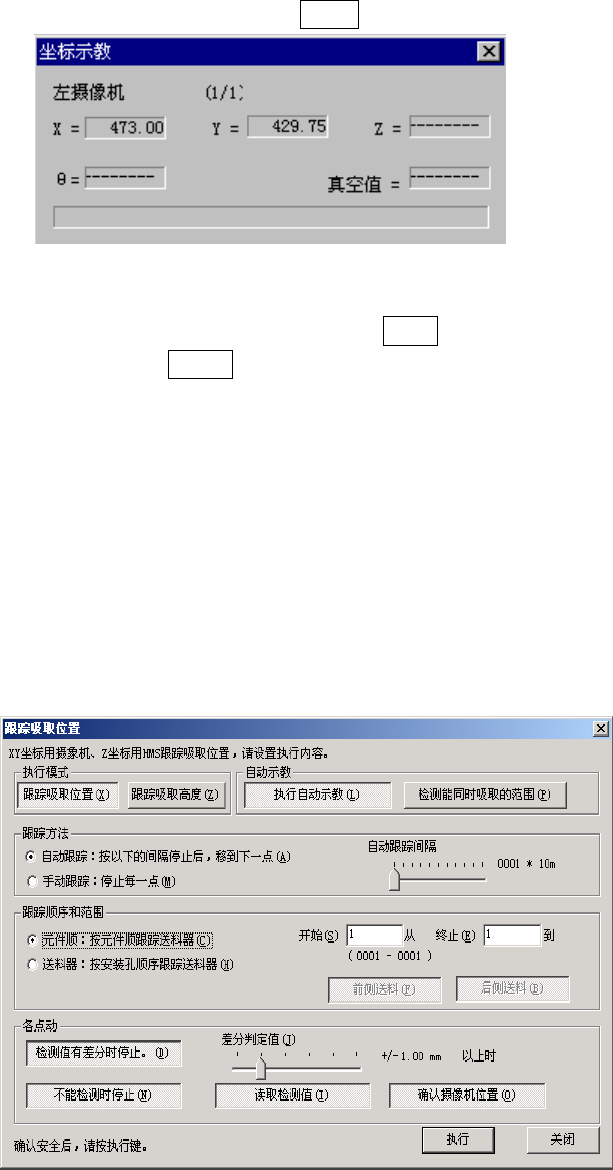
4-5-4-4-4 坐标类:吸取位置/吸取高度
通过摄像机跟踪吸取位置。确认监视器中显示的吸取位置,当输入坐标不准确时,可通过示
教进行修正。
此外,可以通过HMS(选购件)跟踪吸取高度。此时,监视器上依次显示从HMS获得的检测值。
当高度有明显差异时,请与坐标示教一样,对高度值进行示教。
1) 条件设定
从菜单栏中选择“机器操作”/“确认”/“坐标类”/“跟踪吸取位置”,显示如下画面。
图 4-5-43 吸取坐标位置摄像机跟踪
4-137