KE-2050_机器控制参数.pdf - 第57页
R e v 1 . 0 0 机械控制参数 (3) 动作类别 № 类别 内 容 1 0 返回原点时 HOME 传感器检索,高速 JOG 2 1 原点復帰時 捕获指标 , 低速 JOG 3 2 高速步进驱动 4 3 低速步进驱动 5 4 ATC 更换吸嘴动作 6 5 ATC 上升到滑板高度 7 6 ATC 下降到吸嘴安装时更换高度 1 8 7 ATC 下降到吸嘴安装时更换高度 2 9 8 ATC 下降到吸嘴退回时更换高度 10 9 ATC …
Rev1.00
机械控制参数
(2)设定 用)
输入范围
项目(MNLA、FMLA 通
№ 项目
最小值 最大值
单
位
备考
1 0 19 参照(3)动作区分动作区分
2 增益数据 算法 PIV1(4)
3 位置循环比例增益
4 位置循环综合增益
5 速度循环比例增益
6 位置循环送料增益
7 速度循环送料增益
8 加速度循环送料增益
9 送料预期增益
10 轴移动时最大综合增益
11 轴停止时最大综合增益
12 速度循环微分增益
13
DAC 最大输出电压
(最大转矩指令)
14
DAC 最大输出电压上限
) (转矩指令上限
15
DAC 最大输出电压下限
) (转矩指令下限
16
(转矩指令偏差)
DAC 输出偏差
17 速度循环综合增益
18 速度循环综合增益界限值
19 Ka0
20
最小增益
(基本增益)
Ka1
21 位置循环比例增益
22 位置循环综合增益
23 速度循环比例增益
24
的增
益上限值)
速度循环综合增益
最大增益
(使用 PIV1 时
25 位置循环比例增益
26 位置循环综合增益
27 速度循环比例增益
28
Slope゚
置偏差的乘数)
速度循环综合增益
(使用 PIV1 时对位
4-11
Rev1.00
机械控制参数
(3)动作类别
№ 类别 内 容
1 0 返回原点时 HOME 传感器检索,高速 JOG
2 1 原点復帰時捕获指标,低速 JOG
3 2 高速步进驱动
4 3 低速步进驱动
5 4 ATC 更换吸嘴动作
6 5 ATC 上升到滑板高度
7 6 ATC 下降到吸嘴安装时更换高度 1
8 7 ATC 下降到吸嘴安装时更换高度 2
9 8 ATC 下降到吸嘴退回时更换高度
10 9 ATC 吸嘴更换动作(护罩打开时)
11 10 ATC 上升到滑板高度(护罩打开时)
12 11 ATC 下降到吸嘴安装时更换高速 1(护罩打开时)
13 12 ATC 下降到吸嘴安装时更换高度 2(护罩打开时)
14 13 ATC 下降到吸嘴退回时更换高度(护罩打开时)
15
14 ∼
19
预备
4-12
Rev1.00
机械控制参数
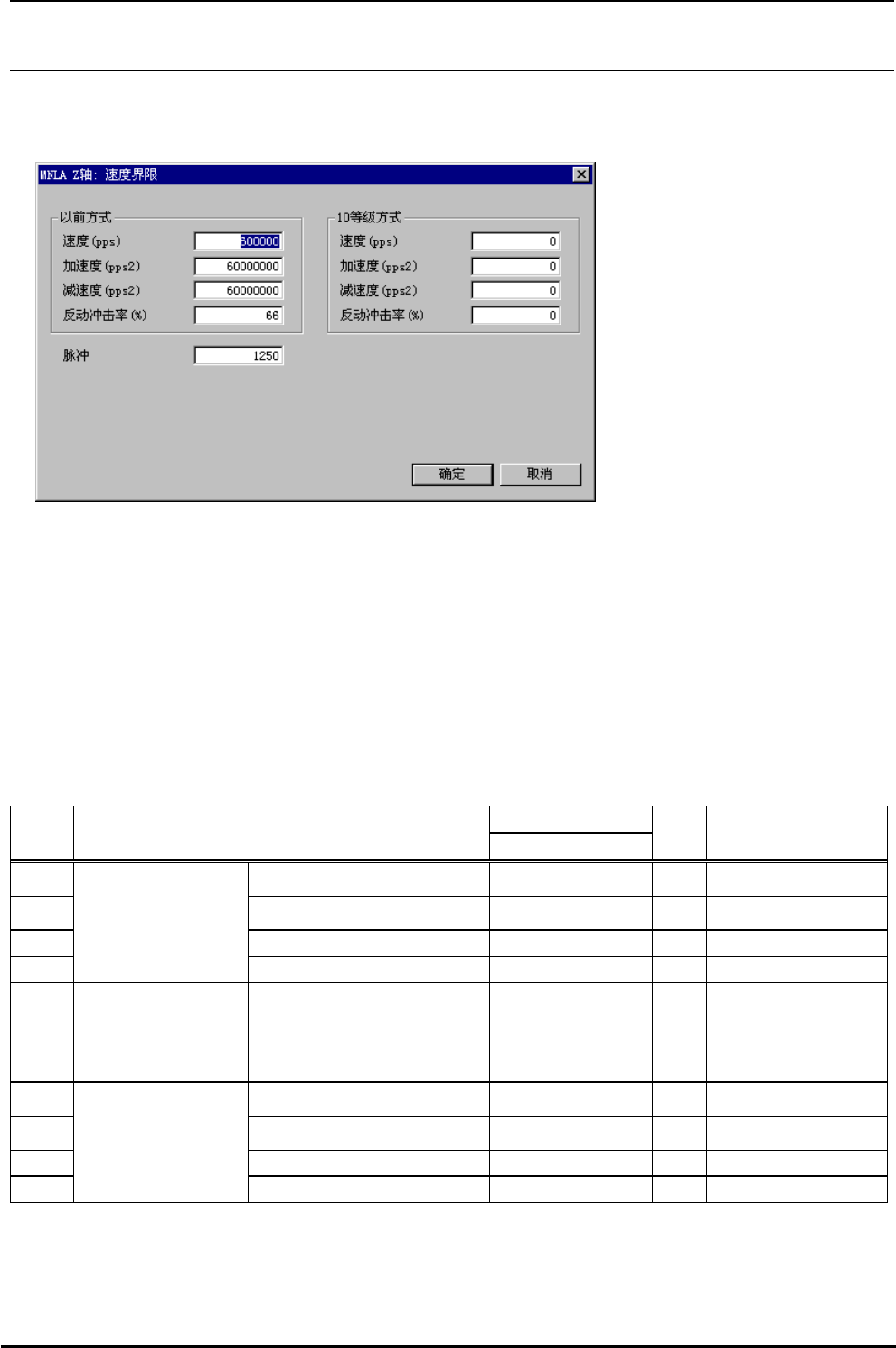
4-1-5 Z轴速度限制
图 4-1-5 Z轴速度限制
(1)设定画面的显示方法
菜单∶ MNLA时, [输入]→[Head]→[MNLA]→[Z]→[速度限制]
FMLA时, [输入]→[Head]→[FMLA]→[Z]→[速度限制]
起动∶ MNLA时, [Head]按键→[MNLA]标签→[Z]标签→[ ]标签 速度限制]按键
FMLA时, [Head] [FMLA]标签→[Z]标 度限制
(2)设定项目 NLA、FMLA 通用)
输入范围
速度限制 →[
→[速按键→ 签→[速度限制]标签 ]按键
(M
№
小值 大值
项目
最 最
单
位
备考
1 速度(pps)
pps
2 加速度(pps2) pps
2
3 减速度(pps2) pps
2
4
过去方式的
Z 轴速度限制
(轴控制参数)
反动冲击率(%) % 0∼100
5 分辨率 脉冲
0.001
μm
MNLA 贴装头:1250
(1.25μm)
FMLA 贴装头:1000
(1.00μm)
6 速度(pps)
pps
7 加速度(pps2) pps
2
8 减速度(pps2) pps
2
9
10 等级方式的
Z轴速度限制
(轴控制参数)
反动冲击率(%) % 0∼100
4-13