00198170-03_Technical_Training_FSE_TX-Series_DE.pdf - 第137页
8 Steuerung und Kommunikation 8.4 Box PC (Steuerrechner) Technisches Training FSE SIPLACE TX-Series 08/2018 137 8.4 Box PC (Steuerrechner) Box PC 427D 1. Power 24VDC 2. GigE-Verbindung 3. Box PC 427D (03114177-xx) 4. US…
8 Steuerung und Kommunikation
8.3 MGCU und MHCU
136 Technisches Training FSE SIPLACE TX-Series 08/2018
GCAN (Gantry CAN-Bus)
TX-Maschinen arbeiten mit dem Maschinen-CAN-Bus und zusätzlich einem zweiten
Portal-CAN-Bus.
Der Portal-CAN-Bus sorgt für die Kommunikation zur Synchronisierung zwischen den MGCUs
(Portalsteuereinheiten) und den MHCUs (Kopfsteuereinheiten).
Komponenten des GCAN-Busses
MGCU 1/2 (Hauptachse) und MHCUs (Kopfachsen)
Fast Drive Bus (FDB)
Zusätzlich zum Maschinen- und Portal-CAN-Bussystem verwenden TX-Maschinen einen Fast
Drive Bus (FDB).
Bedingt durch das dezentralisierte Antriebssystem sorgt dieses CAN-Bussystem für den schnellen
Datenaustausch zwischen MHCUs und MGCUs mit einer extrem schnellen Kommunikation zur
Steuerung der Achsen bei einer Transferrate von 20Mbit/s (verglichen mit 1 Mbit/s zum
MCAN- und GCAM-Bus).
Der FDB ermöglicht eine flexible Anpassung der Antriebsdaten oder auch die Implementierung
neuer Funktionen.
Der FDB ist völlig unabhängig vom Maschinen-CAN-Bus.
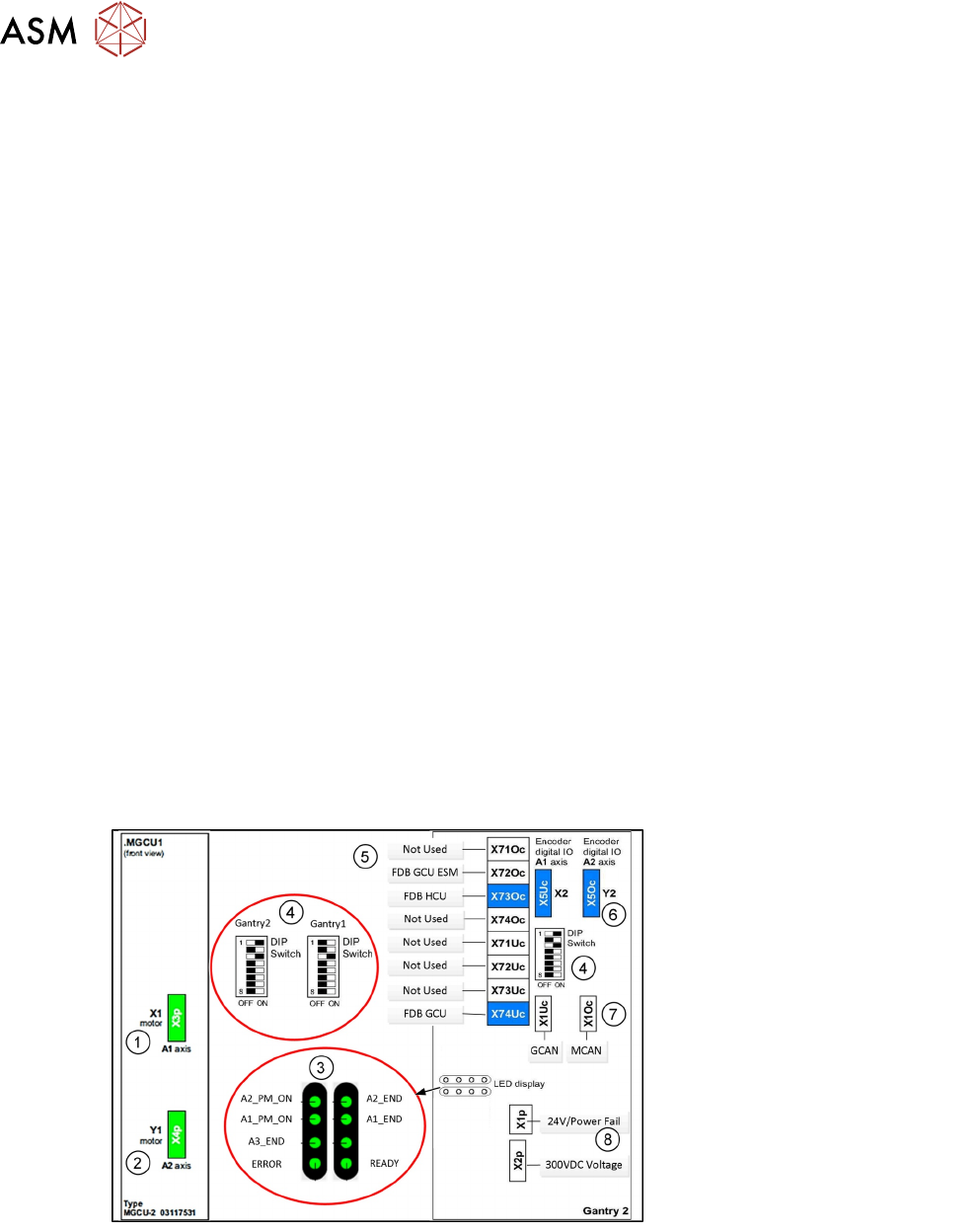
8.3 MGCU und MHCU
MGCU (Modular Gantry Control Unit - Modulare Portal-Steuereinheit):
Die MGCU dient der Steuerung der Portalhauptachsen X und Y; sie besteht aus einem Regelteil
(Control Module - CM) und einem Antriebsteil (Power Module - PM), vergleichbar mit der Achskarte
als Regelteil und der Servokarte als Antriebsteil.
Abhängig vom MGCU-Typ können 2 Portalachsen (MGCU2) oder 3 Portalachsen (MGCU3)
gesteuert werden; die MGCU2 wird in TX-Maschinen als Steuerung für die Portalhauptachsen
(X-/Y-Achsen) verwendet (eine MGCU2 pro Portal).
1. X-Motor-Anschluss
2. Y-Motor-Anschluss
3. LEDs
4. DIP-Schalter
5. Busanschlüsse
6. Stecker X-/Y-Spursignal
7. MCAN und GCAN
8. 24 V Power Fail und 300 VDC
Zwischenkreis
MHCU (Modular Head Control Unit - Modulare Kopfsteuereinheit)
Die MHCU dient der Steuerung der Kopfachsen (Stern / Z) und besteht ebenfalls aus einem
Regelteil (Control Module - CM) und einem Antriebsteil (Power Module - PM).
8 Steuerung und Kommunikation
8.4 Box PC (Steuerrechner)
Technisches Training FSE SIPLACE TX-Series 08/2018 137
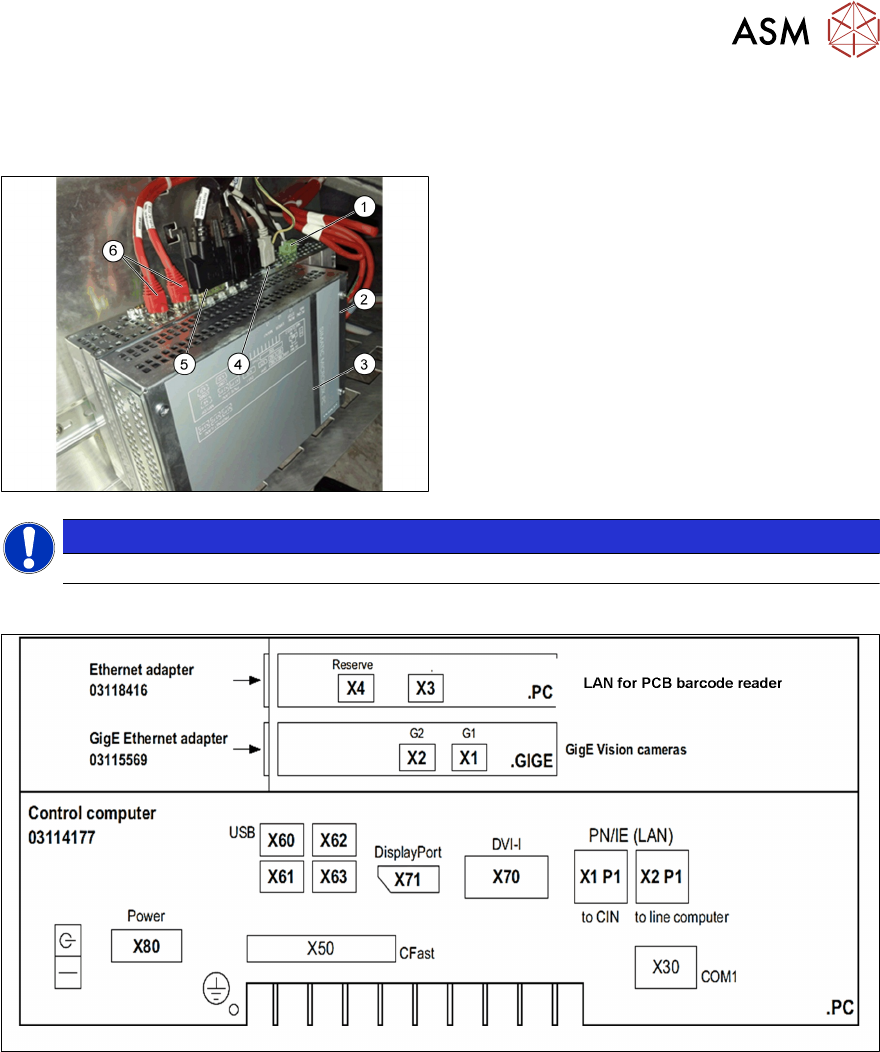
8.4 Box PC (Steuerrechner)
Box PC 427D
1. Power 24VDC
2. GigE-Verbindung
3. Box PC 427D (03114177-xx)
4. USB-Anschlüsse
5. VGA-Anschluss für Monitor 1
DVI-Anschluss für Monitor 2
6. LAN1 CIN‐Box (CAN‐Bus)
LAN2 Linienrechner
HINWEIS
Nach dem Austausch des BoxPC muss die Stationssoftware installiert werden.
Steuerrechner an SIPLACE TX
Unterschiedliche Anschlüsse für verschiedene Monitore: "VGA-Anschluss" (X71) für Monitor 1 (auf
der Seite der Stromversorgung) und "DVI-I" (X70) für Monitor 2.
Solange die Software nicht erfolgreich installiert ist, werden auf den Monitoren unterschiedliche
Anzeigen ausgegeben.
8 Steuerung und Kommunikation
8.5 CIN-Box
138 Technisches Training FSE SIPLACE TX-Series 08/2018
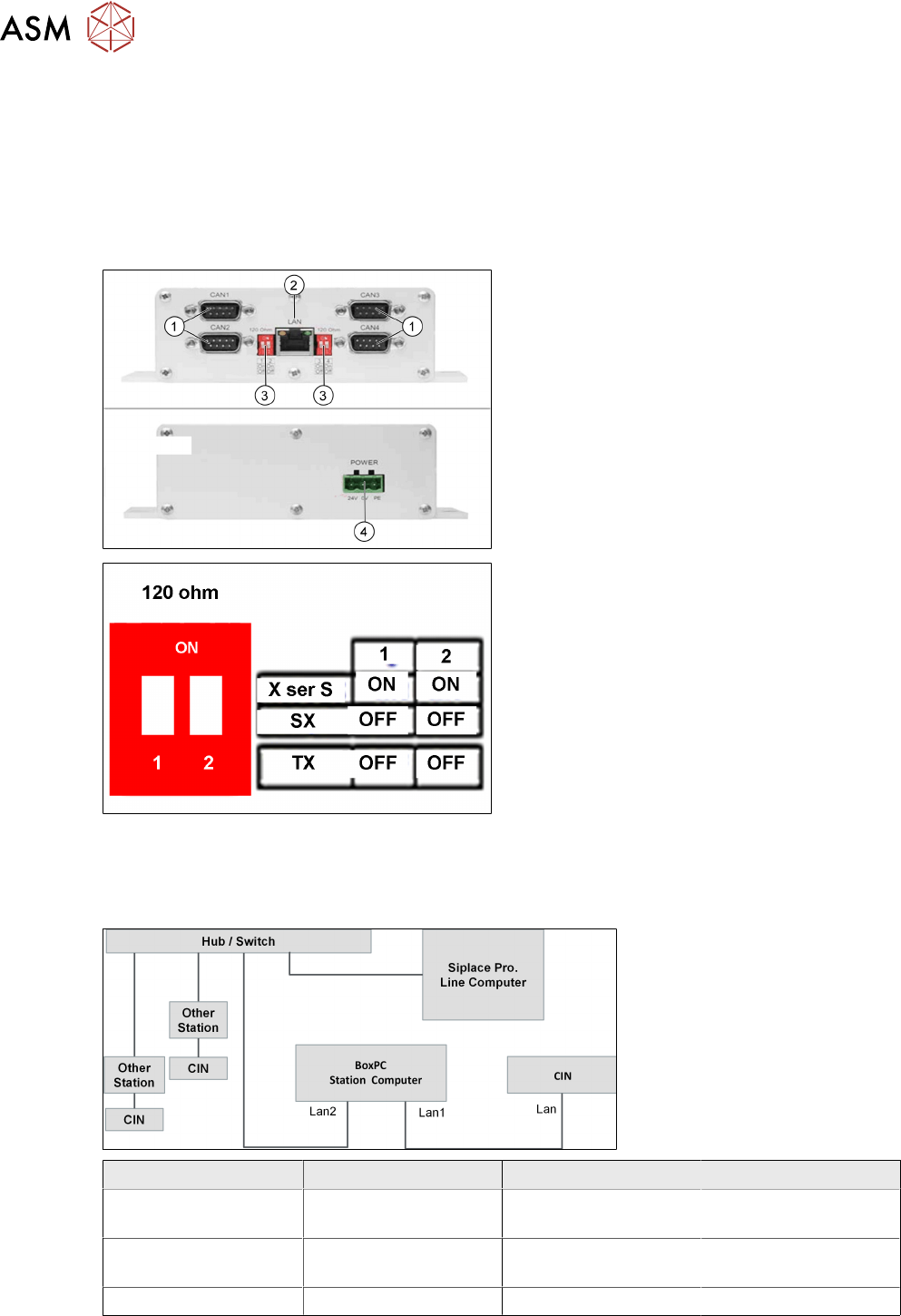
8.5 CIN-Box
●
In TX-Maschinen übernimmt die CAN-Schnittstelle CIN [03108598-xx] die Funktion der
CAN-Karte im vorigen Maschinen.
●
Die CAN-Schnittstelle befindet sich in der SMPS und ist über ein LAN-Kabel an den
BoxPC-427D angeschlossen.
●
In TX-Maschinen ist für den CAN-Abschlusswiderstand der CAN-Schnittstelle immer "OFF"
eingestellt.
1. CAN-Verbindungen 1-4
2. LAN-Anschluss
3. DIP-Schalter - Einstellung des 120 Ohm
Abschlusswiderstands für CANx
Hinweis:
Die DIP-Schaltereinstellungen (siehe
unten) sind für beide DIP-Schalter gültig.
4. Spannungseingang
DIP-Schaltereinstellungen
8.6 Netzwerkstruktur
Netzwerkstruktur
IP-Adresse Subnetz-Maske Bemerkung
SIPLACE LAN 172.22.xxx.xxx 255.255.0.0 LAN-Anschluss am
Rechner
CIN 192.168.255.239 255.255.255.224 LAN-Anschluss am
Rechner
Stationsrechner 192.168.255.249 255.255.255.224