X3_X4_Series machine - 第135页
User manual SIPLAC E X-Series 3 Technical data Software Vers ion SR.601.xx 11/ 2005 US Ed ition 3.7 Placem ent heads 135 3.7.4.1 Descriptio n The 6-seg ment Co llect & Place h ead al so works o n the Co llect & P…
3 Technical data User manual SIPLACE X-Series
3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition
134
3
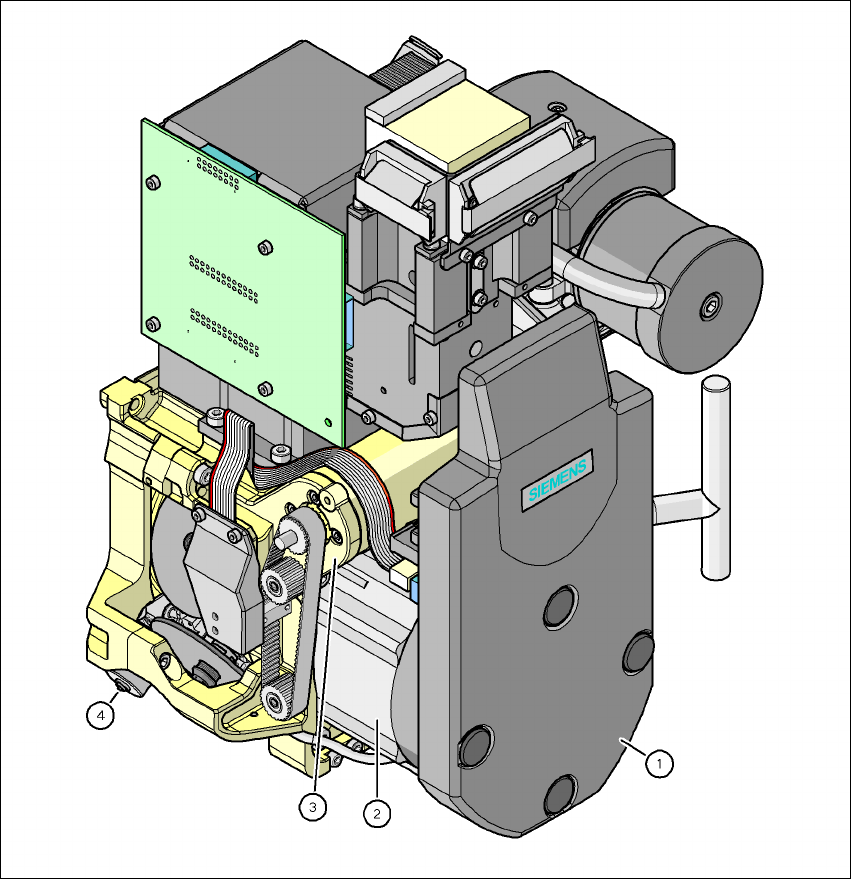
Fig. 3.7 - 11 6-segment Collect&Place head - Function groups, part 2
3
(1) Intermediate distributor board, beneath the cover
(2) Star drive - DR motor
(3) Z axis motor
(4) Valve adjustment drive
(5) C&P component camera, type 29, 27 x 27, digital
User manual SIPLACE X-Series 3 Technical data
Software Version SR.601.xx 11/2005 US Edition 3.7 Placement heads
135
3.7.4.1 Description
The 6-segment Collect&Place head also works on the Collect&Place principle. The high-resolu-
tion digital component camera allows the 6-segment Collect&Place head to place components
with an edge length of up to 27 mm accurately and very quickly. It is therefore ideal for use with
products containing a large proportion of ICs. A considerable increase in output can be achieved
even in the main application range from PLCC 44 to QFP 208.
3.7.4.2 Checking and self-learning functions
The checking and self-learning functions described on page 130 for the 12-segment
Collect&Place head also apply to the 6-segment Collect&Place head.
3.7.4.3 Description of the functions
3
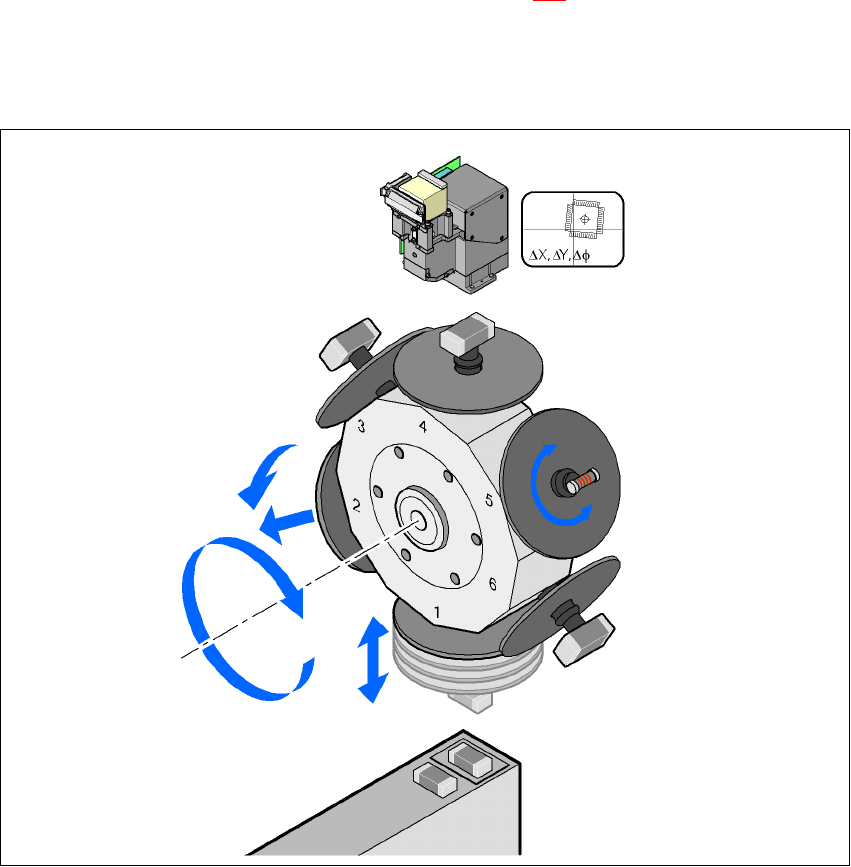
Fig. 3.7 - 12 Description of the functions
Component camera
DP axis
Rotate component
into placement position
Remove sleeve
or insert
Z axis
Pick up component
or place it
Star axis
Star rotation
Reject component
3 Technical data User manual SIPLACE X-Series
3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition
136
Æ The 6-segment Collect&Place head has three axes - the DR or star axis, the Z axis and the
DP axis.
Æ The star rotates about the
star axis
with its 6 segments. The segments hold the sleeves.
There is a nozzle seated on every sleeve, which sucks up the components, and transports
them from the pick-up/placement position (1) to the reject position (2), to the optical centering
position (4) or to the turning position (5).
Æ The
Z axis
performs a vertical movement. Every sleeve that is in the bottom star position (1)
is raised or lowered by this axis, thus picking up the components from the feeder modules
and setting them down on the PCB. The Z axis is an "intelligent axis". It "notes" the pick-up
height of each feeder module track and the placement height for each component. This can
speed up the placement process. The programmed placement force remains constant.
Æ The
DP axis
rotates the optically centered component to the desired placement angle. The
sequences of movements of the rotation and translation axes are controlled by control cir-
cuits. Position and speed sensors send the actual values for the axis movement to the axis
control. The setpoint and actual values are compared and used to determine the force and
speed parameters for the servo amplifier, and thus the axis movement to be performed. The
vacuum values at the nozzle are constantly checked throughout the entire pick-up and place-
ment process in order to keep the placement error rate as low as possible.