X3_X4_Series machine - 第139页
User manual SIPLAC E X-Series 3 Technical data Software Vers ion SR.601.xx 11/ 2005 US Ed ition 3.7 Placem ent heads 139 3.7.5.1 Descriptio n This sop histic ated placeme nt hea d consists o f two plac ement hea ds of th…
3 Technical data User manual SIPLACE X-Series
3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition
138
3.7.5 SIPLACE TwinHead for high-precision IC placement
3
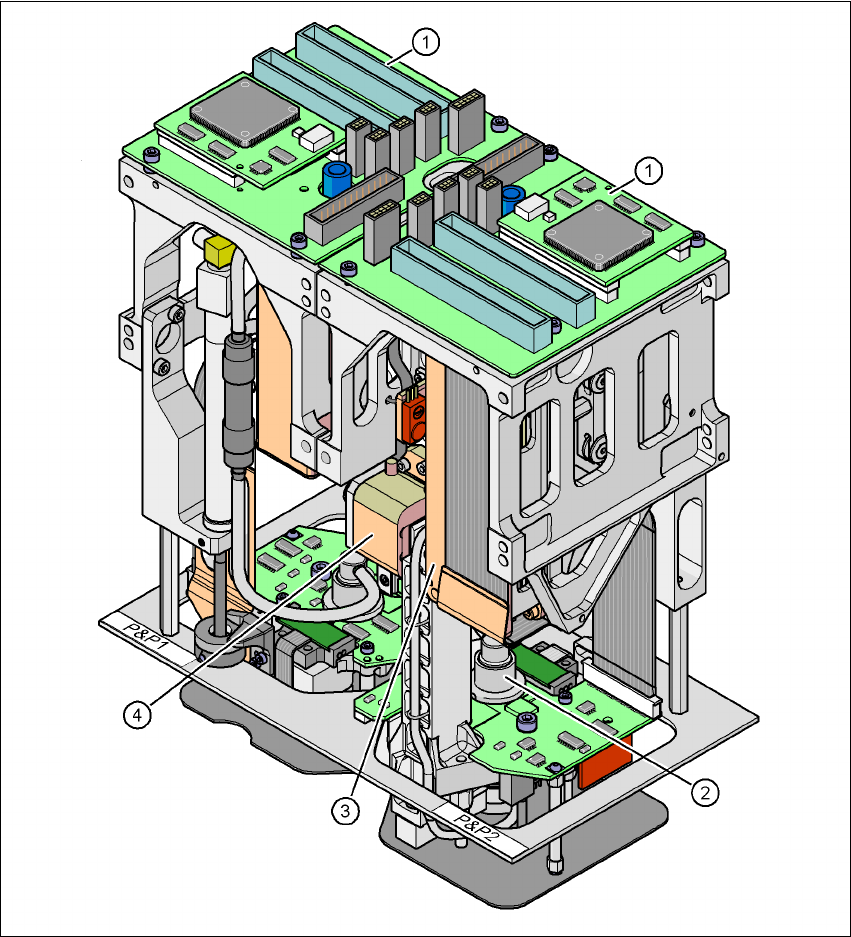
Fig. 3.7 - 13 TwinHead for high-precision IC placement
3
(1) Pick&Place module - the TwinHead consists of 2 Pick&Place modules (P&P1 and P&P2)
(2) DP axis
(3) Z axis drive
(4) Incremental distance measuring system for the Z axis

User manual SIPLACE X-Series 3 Technical data
Software Version SR.601.xx 11/2005 US Edition 3.7 Placement heads
139
3.7.5.1 Description
This sophisticated placement head consists of two placement heads of the same type coupled to-
gether (twin head). Both heads work using the Pick&Place principle. The TwinHead is suitable for
processing particularly difficult or large components. Two components are picked up by the place-
ment head, optically centered on the way to the placement position and rotated into the necessary
placement angle. They are then placed gently and accurately onto the PCB with a controlled blast
of air.
New nozzles (type 5xx) have been developed for the TwinHead. It is also possible to fit an adapter
and then use type 4 nozzles for the Pick&Place head and type 8xx and 9xx nozzles for the
Collect&Place heads.
Checking and self-learning functions 3
The TwinHead's reliability can be further increased with various checking and self-learning func-
tions.
– For example, vacuum checks at the nozzles indicate whether the component was picked up
or set down correctly.
– A force sensor measures and monitors the specified component placement forces.
– High-resolution, intelligent vision modules, such as the fine-pitch and flip-chip vision modules,
identify and correct minute deviations from the desired component position, thus guarantee-
ing a correct placement position. The component cameras are permanently fixed to the ma-
chine frame.
– The component package form is also checked, and the component is not placed if the geo-
metric data thus determined differs from the programmed data.
– If the compressed air or power fails, the vertical axis (Z axis) is raised to a safe position in
order to prevent a head crash.
3.7.5.2 Description of the functions
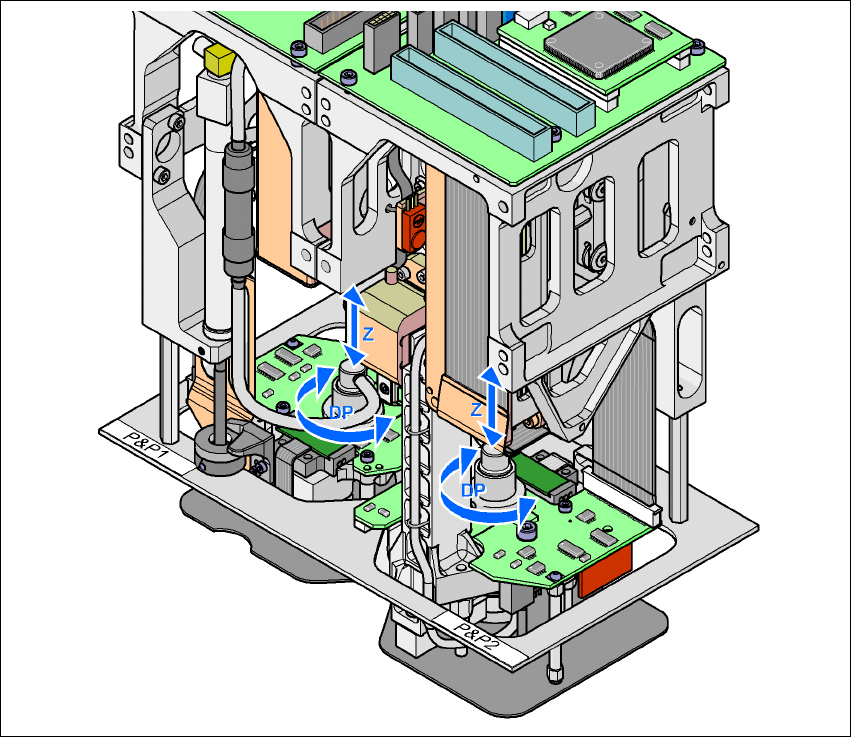
The TwinHead consists of two Pick&Place heads that are coupled to one another, but are con-
trolled independently. Each head has two axes - the Z and the DP axis (see Fig. 3.7 - 12
).
The traversing path of the
Z axis
is detected via a high-resolution, linear incremental measuring
system. The Z axis performs a vertical movement. A linear motor raises and lowers the Z axis, and
components are picked up from feeder modules or trays and lowered onto the PCB. The Z axis is
an "intelligent axis". It "notes" the pick-up height for feeder modules and trays and the placement
height for each component. This can speed up the placement process. The programmed place-
ment force is measured and monitored by a force sensor.
3 Technical data User manual SIPLACE X-Series
3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition
140
The
DP axis
rotates the optically centered component to the desired placement angle. The rota-
tion axis is driven by a stepping motor. The motor shaft is designed as a sleeve. At the top end is
the incremental disk for angle analysis, while the nozzle holding device is at the bottom end.
The sequences of movements of the rotation and translation axes are controlled by control cir-
cuits. Position and speed sensors send the actual values for the axis movement to the axis control.
The setpoint and actual values are compared and used to determine the force and speed param-
eters for the servo amplifier, and thus the axis movement to be performed.
The vacuum values at the nozzle are constantly checked throughout the entire pick-up and place-
ment process in order to keep the placement error rate as low as possible.
3
Fig. 3.7 - 14 Description of the functions