D-serie level 1 EN.pdf - 第103页
C&P6/12 Placement Heads Positioning into Placement Angle Placement Procedure S tude nt Guide Advanced Level 1 SIPLACE D-Series EN 05/2 007 C&P6/12 Placement Heads 6-23 6.2.22 Positioning into Placement Angle 6.2.…
C&P6/12 Placement Heads
Placement Procedure Completing Board Placement
Student Guide Advanced Level 1 SIPLACE D-Series
C&P6/12 Placement Heads EN 05/2007
6-22
6.2.19 Completing Board Placement
The SIPLACE placement station activates the conveyor system and moves the board into the output
conveyor.
Finally, the SIPLACE placement station reports the number of components consumed (placed and
rejected) to the line control computer (LC) SIPLACE Pro.
The OIS (Operator Information System) compiles the placement statistics which relate to the data
set at the station, the programed panels or the last reset time. This data is used for optimizing the
process.
The machine is now ready for the next board.
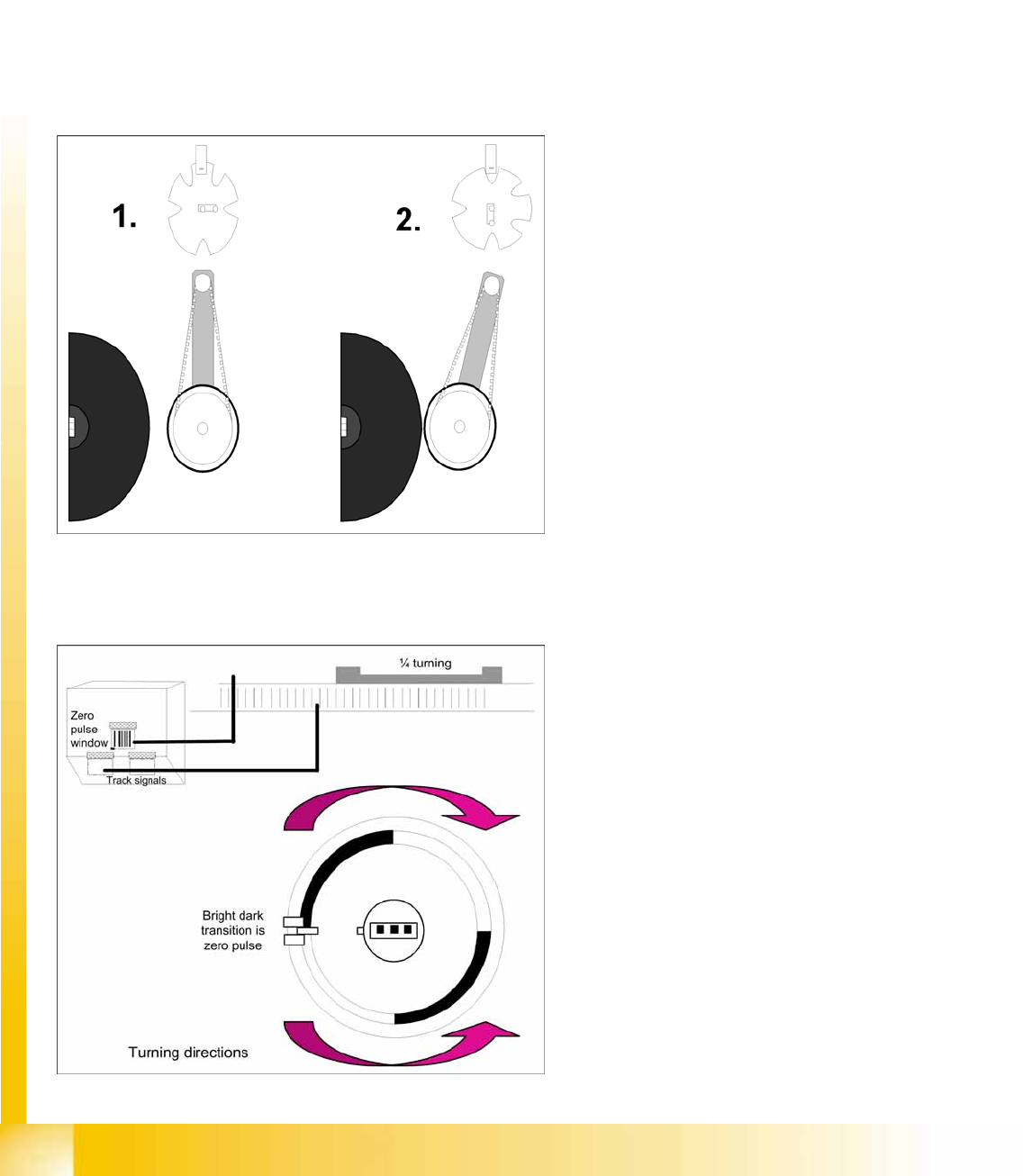
6.2.20 Detailed Rotation of DP Station 1. Swivel In
6.2.21 Positioning into Pickup Angle
6-27: Detailed rotation of DP station, 1. Swivel in
Diagram 1 shows the initial position (state after
reference run).
From the initial position, the stepping motor
rotates by 90° for swivel-in.
The DP station swivels in and contacts the
sleeve (incremental disk).
The stepping motor is monitored by the light
barrier on the cam disk.
Diagram 2 shows the status after swiveling in.
This is the start command for the DP axis
drive.
6-28: Detailed rotation of DP station, positioning into pickup angle
The DP axis positions the segment to the
relevant zero pulse and checks the signal level
at a distance of 3 digits.
An end position signal is emitted if the actual
position deviation is within the permitted
tolerance.
There is no difference between the 0° and
180° or 90° and 90° pickup angle.
C&P6/12 Placement Heads
Positioning into Placement Angle Placement Procedure
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 C&P6/12 Placement Heads
6-23
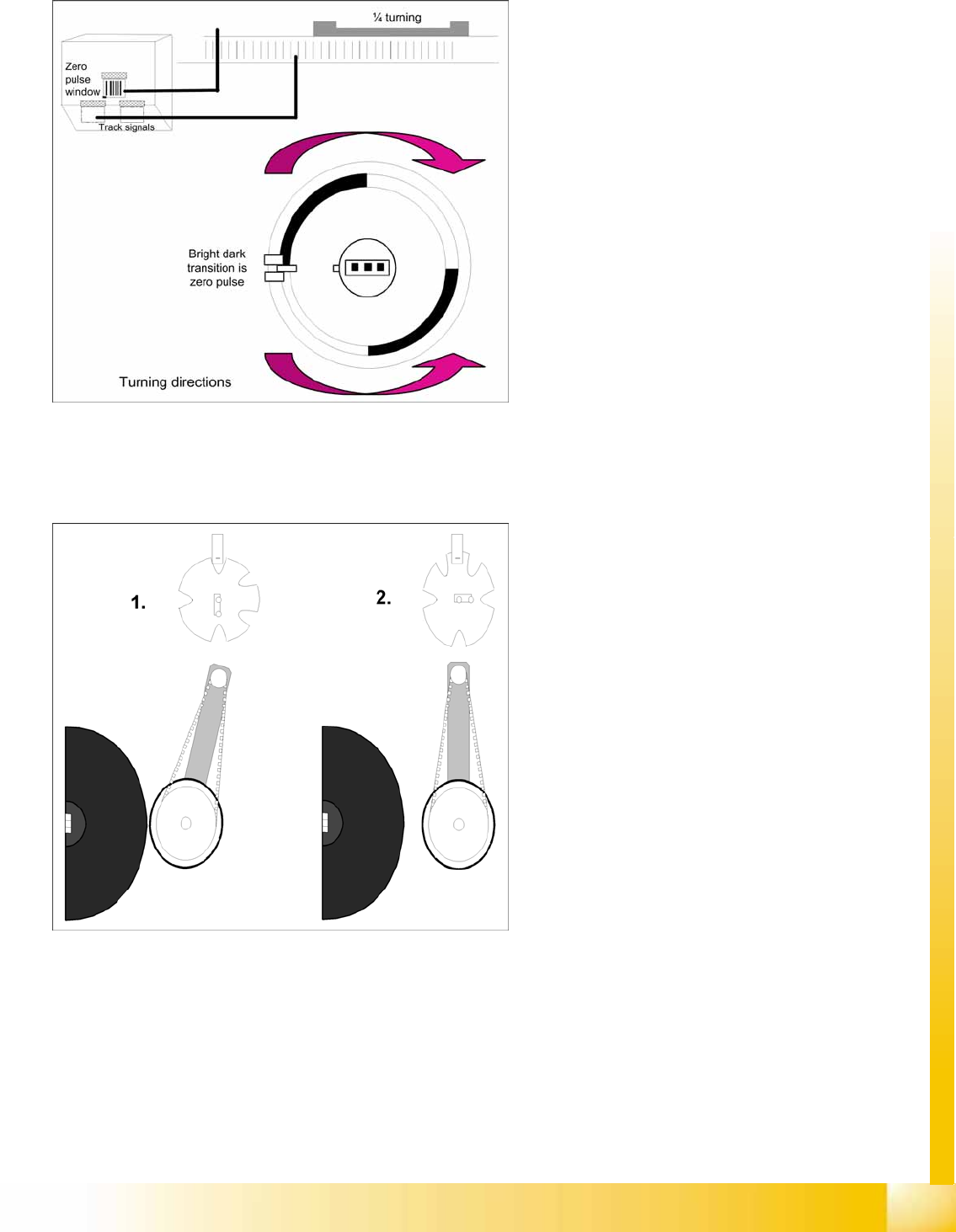
6.2.22 Positioning into Placement Angle
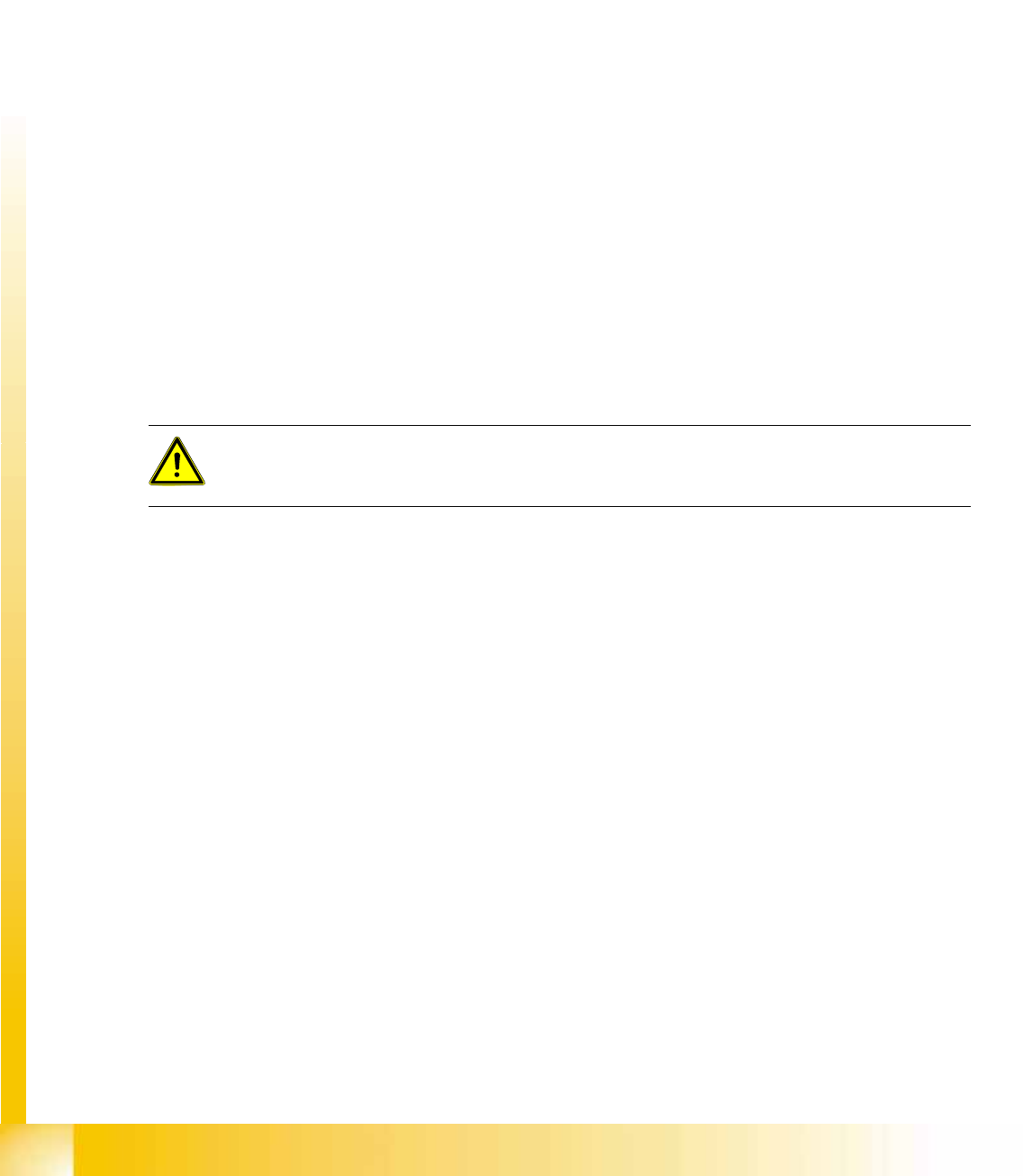
6.2.23 Detailed rotation of DP station, 3. Swivel Out
6-29: Detailed rotation process at DP station, positioning into placement
angle
When positioning begins, the actual position of
the axis is set to 0 by setting the position
counter of the DP axis to 0.
The DP drive is operated in relative positioning
mode.
The DP axis starts to move towards the target
position which is calculated from the station
calibration values, the line computer
programming values and the centering values
of the placement procedure.
An end position signal is emitted as soon as
the actual position deviation is within the
permitted tolerance.
6-30: Detailed rotation of DP station, 3. Swivel out
The command to start swiveling out is the end
position signal from DP positioning.
The DP drive is still located at the sleeve.
Diagram 1 shows the status when swiveled in.
The stepping motor is controlled by the light
barrier on the cam disk.
From its swiveled-in status, the stepping motor
rotates by 90° in a counterclockwise direction,
to swivel out.
Diagram 2 shows the status when swiveled
out.
C&P6/12 Placement Heads
Placement Procedure Optical Nozzle Query (Nozzle Scanning)
Student Guide Advanced Level 1 SIPLACE D-Series
C&P6/12 Placement Heads EN 05/2007
6-24
6.2.24 Optical Nozzle Query (Nozzle Scanning)
1. After placing the first board the nozzle query is activated:
– All nozzles listed for optical checking will be measured by the component camera (nozzles such
as 901, 904, 911, 914, 925).
– From SW 601, these can be found in the nozzle.lib.xml
– The optimum illumination technique and the appropriate algorithms enable SIPLACE Vision to
locate the exact outline of the nozzle type. In the case of deviations, a 'nozzle dirty' signal is
emitted at the station. This check is repeated until the operator has solved the problem with the
appropriate measures (replacement, cleaning).
SIPLACE Vision not only examines the outline but also the inner contours of the air inlet. In this
case, the station emits a 'vacuum system dirty' signal. (see above for solutions)
2. Due to the low component height, small nozzles may touch the soldering paste or adhesive if a
component has slipped.
3. The number of components per segment (number of head cycles), after the next nozzle query has
been performed, should be adjusted to the customer's process requirements. This test is always
performed after board processing has been completed.
Parallel to the nozzle query, the vacuum reference run for the placement head is repeated in order to
detect any changes in nozzle quality, during the placement process.
6.2.25 Air Blast Control During Placement
This function takes a programming option which was designed for the Twin and C&P20 heads and uses
it as follows for the C&P6/12 placement head, as a time control function.
Air blast control during placement with the C&P6/12 head
Entering "0" means: air blast valve will not be switched on. (Do not use!)
(1) Entering "1-50" means: air blast valve will be switched off before the stepping motor is started.
(Not recommended as the air blast is then too short to reliably place the component.
(2) Entering "51-150" means: air blast valve will be switched off at a 90° rotation of the stepping
motor.
(3) Entering "151-255" means: the air blast valve will be switched off when the light barrier is up or
when the stepping motor rotates by 180°.
No entry "----" (from conversion of 501/502 to 503) means: switching as in 3 (standard).
Air blast control for placing back (not rejecting) with the C&P6/12 head
(4) Entry and description as in (1)
(5) Entry and description as in (2)
(6) Entering "151-255" means: air blast valve will be switched off at a 180° rotation of the stepping
motor.
ATTENTION:
Do not use this function to save time. It will affect you placement reliability. Components could
be pushed up, for example.