D-serie level 1 EN.pdf - 第176页
SIPLACE Vision Optical Fiducial Models Inkspot Recognition S tuden t Guide Advanced Level 1 SIPLACE D-Series SIPLACE Vision EN 05/2007 10-10 Teaching ima ge do not pl ace : Fiducial has been hidden by black marker pen Im…
SIPLACE Vision
Inkspot Recognition Optical Fiducial Models
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 SIPLACE Vision
10-9
10.1.3.3 The Histogram Method
With this method, each teach image is given standardized brightness but not standardized contrast. If
there are multiple teaching images available for a particular class, an average histogram will be
calculated.The model therefore consists of one histogram for the good case and one for the bad
case.During classification, the histogram is calculated for the evaluation area of the current image and
is then compared to the two model histograms, to ascertain whether there is any deviation.The image is
then assigned to the class (good or bad) from which it deviates less.
The following example illustrates this procedure:
10-3: SC pattern as inkspots 02 0505
For the negative inkspot, either position above
another fiducial or teach manually to the position
of the label. Alternatively, you can mark the
positive inkspot accordingly.
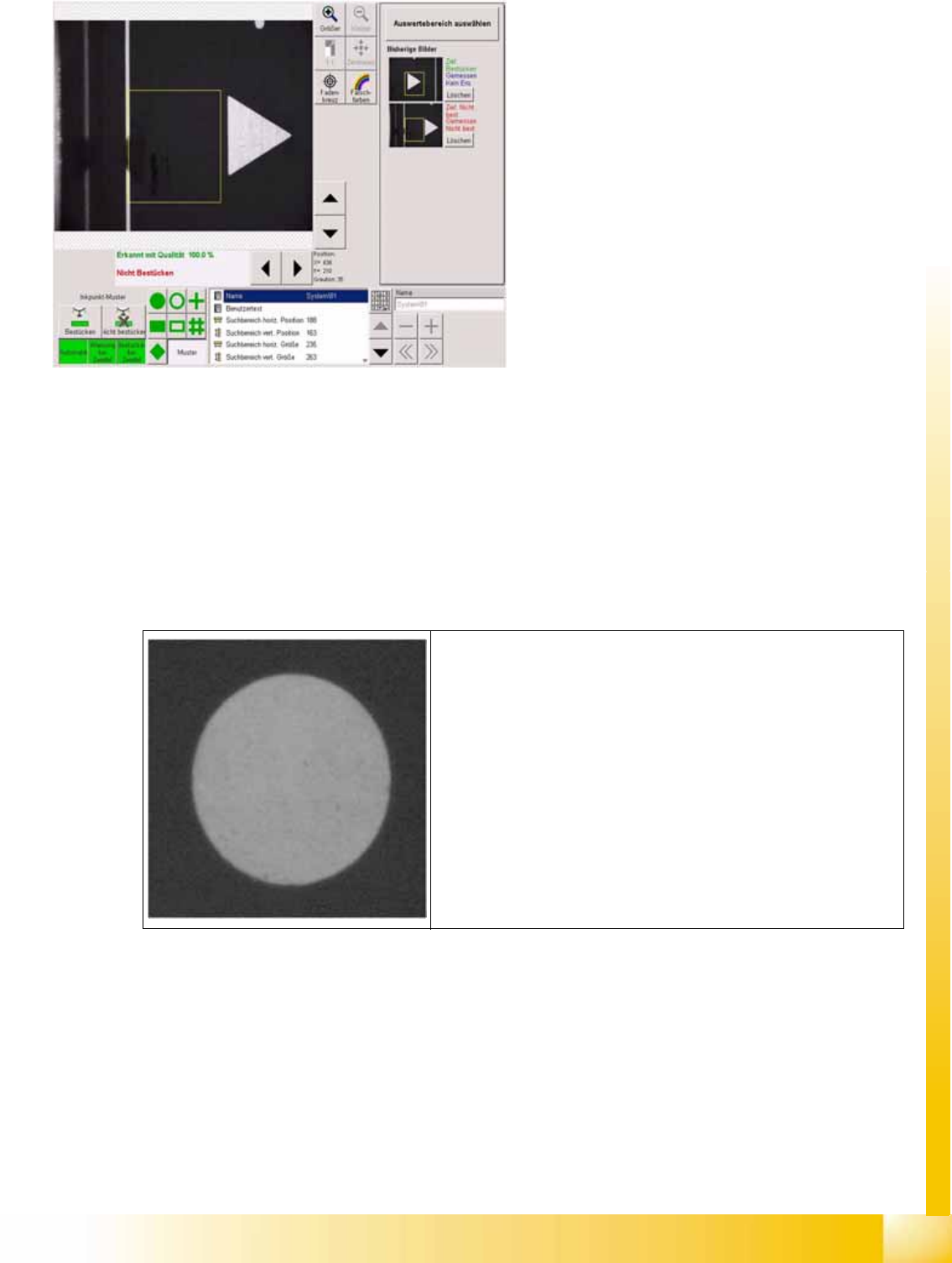
Teaching image place:
Light-colored circular fiducial on dark background
SIPLACE Vision
Optical Fiducial Models Inkspot Recognition
Student Guide Advanced Level 1 SIPLACE D-Series
SIPLACE Vision EN 05/2007
10-10
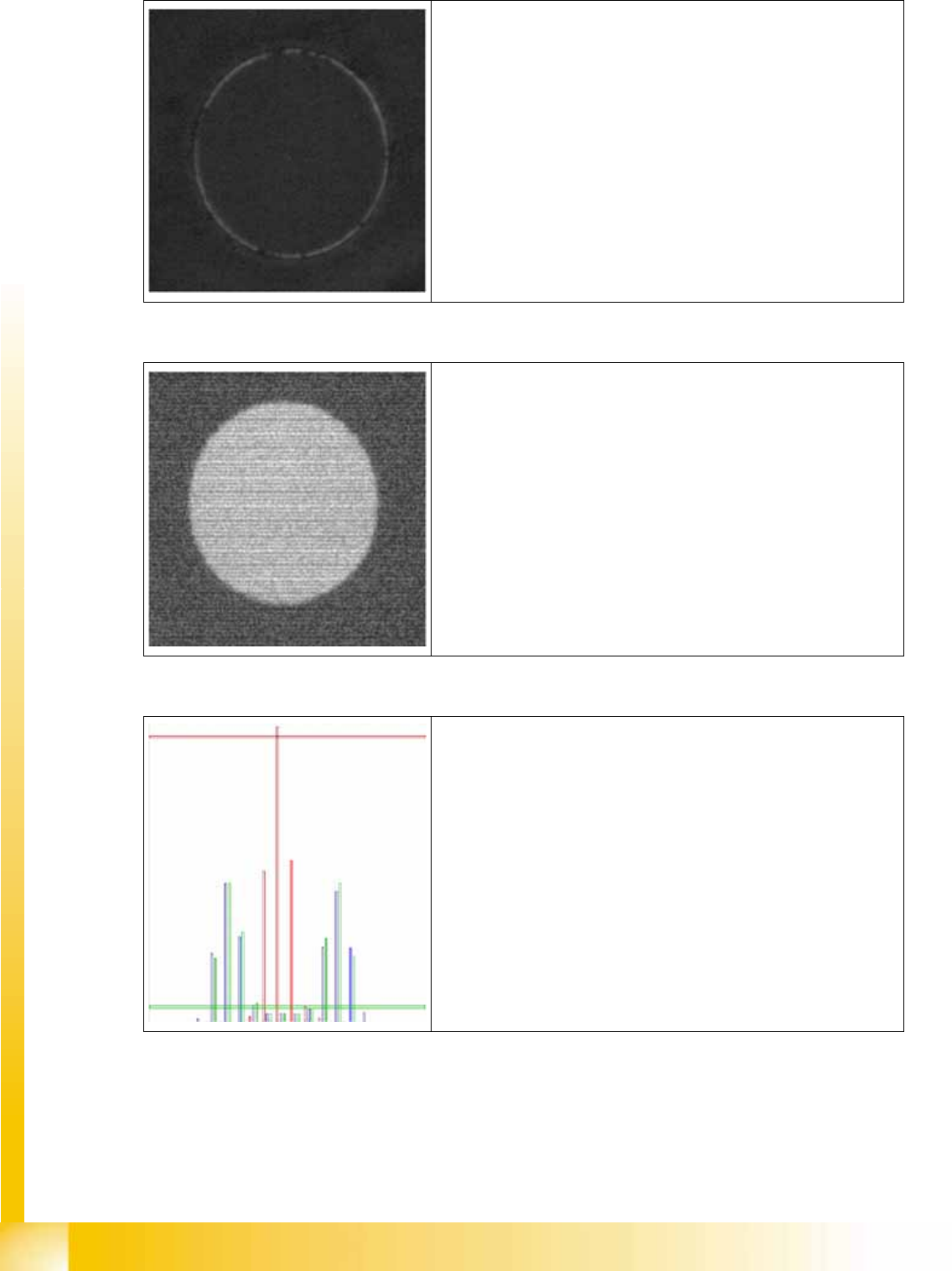
Teaching image do not place:
Fiducial has been hidden by black marker pen
Image to be classified
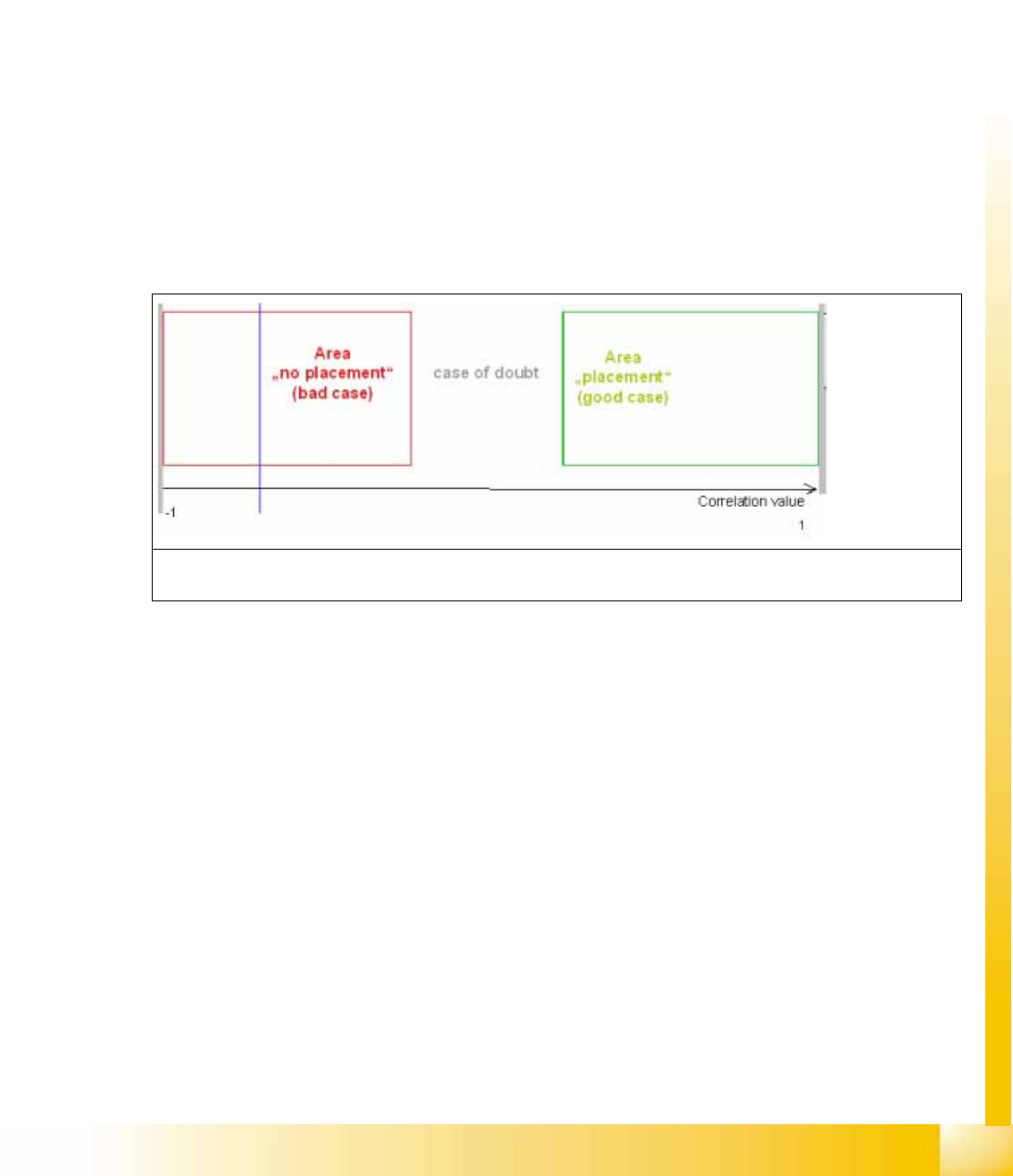
Red vertical bar:
Taught histogram do not place
Green vertical bar:
Taught histogram place
Blue vertical bar:
Histogram of evaluation image
Horizontal bar: Deviation from the teaching histogram; in this case
there is very little deviation to the green bar -> place
SIPLACE Vision
Inkspot Recognition Optical Fiducial Models
Student Guide Advanced Level 1 SIPLACE D-Series
EN 05/2007 SIPLACE Vision
10-11
Features:
Fast procedure.
Classification consists of global image attributes, meaning that a defined shape is not required.
Non-sensitive to fluctuation in brightness.
Can be seen as an advanced contrast method for SW platform II.
The method can be switched over in the Geometry menu.
You need to make sure that the evaluation area for the image is in the same position as that for
teaching i.e. perform a position recognition run before inkspot recognition.
10.1.3.4 Simple Brightness Method
The brightness method is a general method which is subject to brightness fluctuation at the line cameras.
This method also calculates the model information by teaching both a good and a bad case . It is the
simplest of all the methods. The good and bad cases calculated are used to determine an average
brightness for each case. The system then defines two brightness thresholds, which split the gray value
range into three areas: bad – in doubt – good. During classification, the average brightness of the
evaluation area is calculated and compared against the two thresholds so that it can be assigned to one
of the three areas.
Features:
Fast procedure.
Classification consists of global image attributes, meaning that a defined shape is not required.
Sensitive to fluctuations in brightness, meaning that this method is not ideal when used with lines
which have different PCB camera brightnesses.
Once again, you need to perform a position recognition run before inkspot recognition.
Overlay during classification: the blue bar indicates the brightness deviation calculated between the values and
shows that our example has been assigned to the do not place class.