SM482_PLUS_Operation(Chi_Ver2.1) - 第8页
设备各部 分名称 Chap ter 1 本 Chapter 介绍设备、操作面板及 MMI ( Man - Machine Interface )。 设备概要 Multi - Functional Pla cer Operation Handbook 1-1 设备各部分名称 1. 设备前面 Chap ter 1 设备概要 本 Chapter 介绍设备、操作面板及 MMI ( Man - Machine Interface )。 2. 设备…
概要
Multi-Functional Placer
Operation Handbook
7
概要
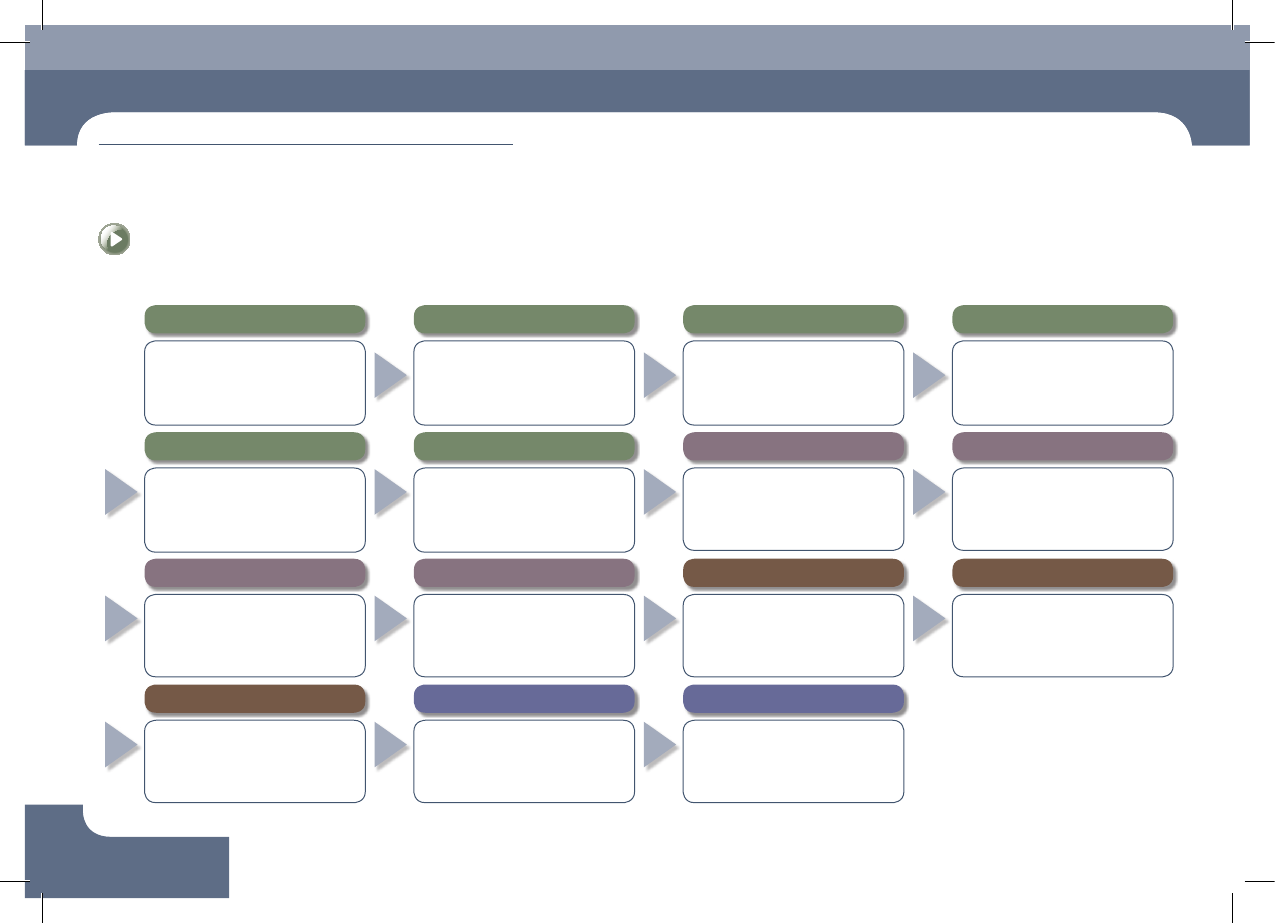
作业流程
SM482 PLUS 总操作 流 程 如下。
8.
安装及元器件的订货
● 按照需要进行作业的PCB安装供料
器与吸嘴。
● 掌握供料器的元器件剩余量后,事先
订购可能会耗尽的元器件。
7.
PCB下载/业务的确认
● 打开需要进行作业的PCB文件后
下载。
● 开始进行作业之前,先检查先前作业
状态后确认生产目标。
6.
暖机( Warming-Up)
● 为了提高设备的贴装精度,在作业开
始的约10分钟前进行Warming-Up
运转。
5.
执行回归原点动作
● 在示教盒或MMI画面单击"Home"
键执行回归原点动作。
1. 设备起动前的检验
● 气压 ● 额定电压
● 供应装置 ● 安全护盖
● 检查设备周围的安全等事项。
4.
为设备的电动机供应电源
● 为了操作本设备而按下"READY"
按钮。
3.
MMI的初始化
● 执行了MMI后,程序将自动进行初始
化并且检查设备的各模组。
2.
打开主(Main)开关
● 沿着顺时针方向旋转设备正面的主
开关为设备供应电源。
9.
设置传送轨道及顶针
(Backup Pin)
● 执行传送轨道宽度调整作业,设置
PCB固定方式。
● 把顶针配置在适当位置以便支持
PCB底面。
10.
检查位置及示教
● 检查PCB原点
● 检查PCB基准标记位置
● 检查吸附点(Pickup Point)
● 检查贴装点
11.
生产PCB
● 选择MMI的"生产"菜单
● 在<生产计划>栏上输入生产目标量
● 选择MMI的"开始"子菜单
● 按下操作面板的"START"键
12.
生产中检验事项
● 检查检查供料器的元器件剩余量
● 检查元器件的匹配性(以2小时为周期)
● 供料器的乙烯膜清除/清扫
● Pickup不良供料器的监视
13.
生产中的对应措施
● Pickup不良时的对应措施
● 乙烯膜夹住时的对应措施
● PCB夹住时的对应措施
● 元器件耗尽时的对应措施
14.
结束生产及更改作业
● 生产完毕后,选择"Finish"子菜单完
成生产。
● 如果需要生产其它PCB,则进行作业
变更的准备工作。
15.
关闭电源及清扫
● 单击"RESET"键
● 单击"Exit"图标
● 关闭主(Main)开关(逆时针方向)
● 整理作业场所的周边环境
设备概要
设备各部分名称
Chapter 1
本Chapter介绍设备、操作面板及MMI(Man-Machine Interface)。
设备概要
Multi-Functional Placer
Operation Handbook
1-1
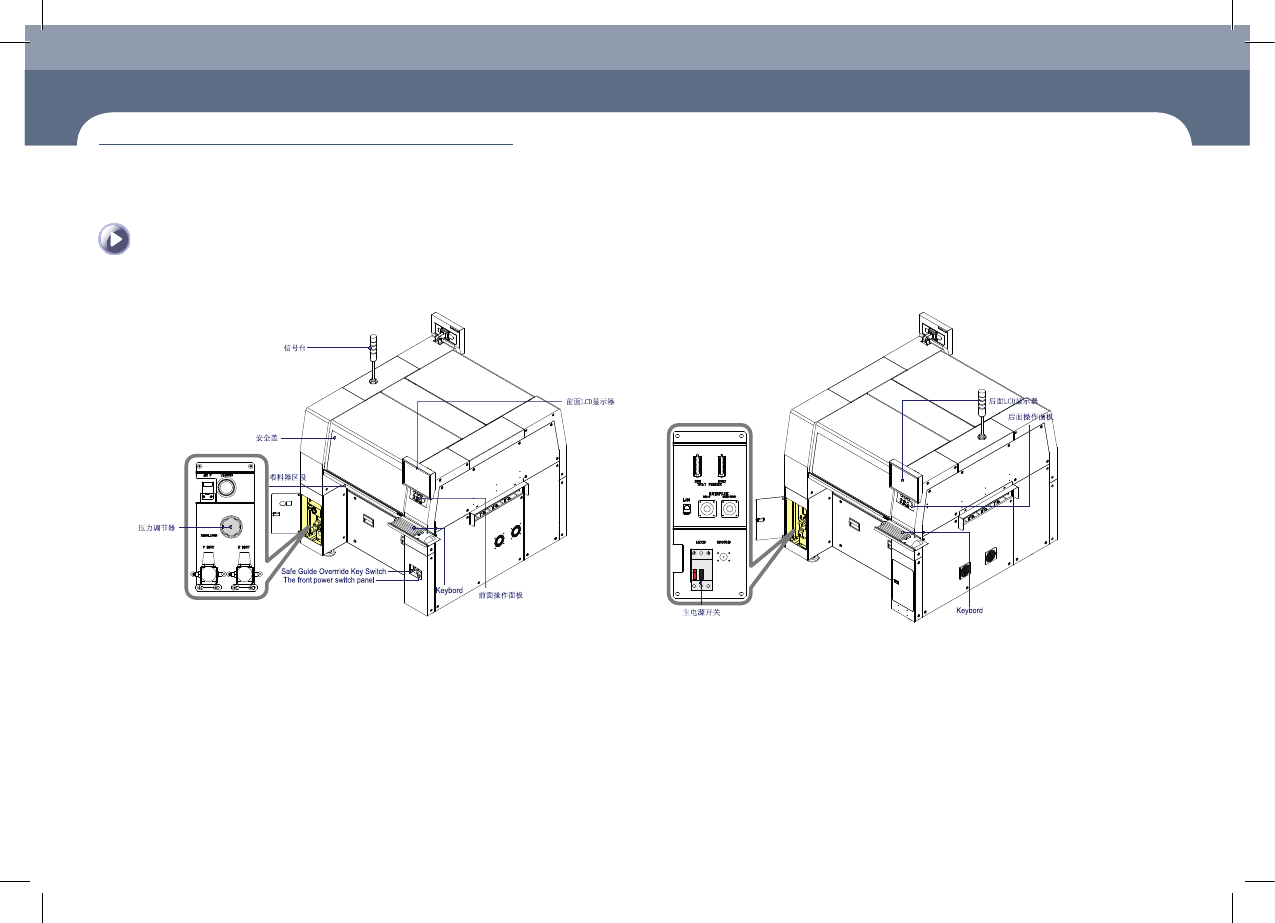
设备各部分名称
1. 设备前面
Chapter 1
设备概要
本Chapter介绍设备、操作面板及MMI(Man-Machine Interface)。
2. 设备后面
设备各部分名称
操作面板的按键操作
Chapter 1
本Chapter介绍设备、操作面板及MMI(Man-Machine Interface)。
设备概要
Multi-Functional Placer
Operation Handbook
1-2
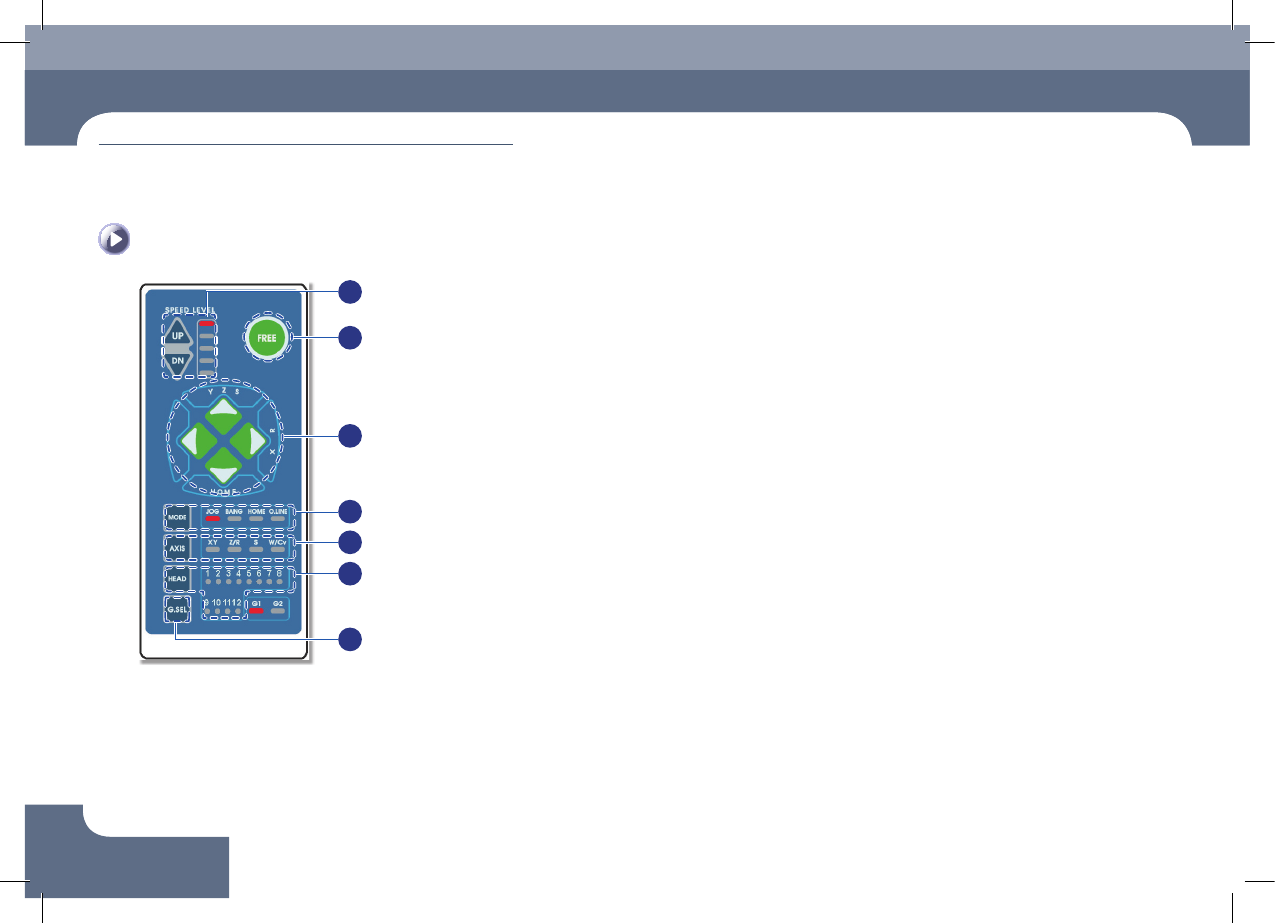
操作面板的按键操作
设备概要
1
2
3
4
5
6
7
① Speed Level Up/Down
选择Jog模式下的操作对象的移动速度。
速度可选择5个级别。
ㆍ 在Mode选择了Jog时
→ UP:快速
→ DN:慢速
操作面板的按键操作
②
FREE
紧急情况下,按压该按钮就能立刻停止本设备的运转。
③
◄► ▲▼
按钮
指示各轴的移动方向或旋转方向。各按钮的功能会随
着
Mode
与
Axis
的选择与否而不同。
④
Mode
J
选择诸如
Jog
、
Bang
、
Home
之类的模式。按压按钮就会按照下列顺序转换模式。
模式转换顺序:
Jog
→
Bang
→
Home
→
LED
灯灭 →
Jog
...
ㆍ Jog: 移动各轴的模式。
ㆍ Bang: 细微移动各轴的模式。
ㆍ Home: 各轴的原点复归模式。
⑤
Axis
选择操作对象。每按一次按钮,就会按照下列顺序改变操作对象。
操作对象转换顺序:
XY
→
Z
/
R
→
W
/
Cv
→
LED
灯灭 →
XY
...
ㆍ XY:让头部组件在X或Y方向移动时选择。
ㆍ Z/R:让选定的头部轴杆上下移动或旋转时选择。
ㆍ S:打开或关闭飞行相机模块的镜子时选择。
ㆍ W/Cv:调整输送机的宽度时选择。
⑥
Head
Axis
:
Z
/
R
(选择需要操作的头部轴杆)
Axis
:
W
/
Cv
(选择输送机或
BUT
)
⑦
G.SEL
选择作为操作对象的
Gantry
。