XP固有值一览 Type-III V1 51 (2)
http://www .fuji.co.jp/ Copyright © 2007 by Fuji Machine Manufacturing Co., Ltd. All Rights Reserved 版本升级报告附加资料 No. 07031A 发 行 日: 2007 年 8 月 2 日 对 应 机 型: XP-143E/243E (后期机型) (控制软件) 新 版 本 号: V1.51 (已发行的版本号: V1.50 ) 下页开始为版…

http://www.fuji.co.jp/
Copyright © 2007 by Fuji Machine Manufacturing Co., Ltd. All Rights Reserved
版本升级报告附加资料 No. 07031A
发 行 日: 2007 年 8月 2日
对 应 机 型: XP-143E/243E(后期机型) (控制软件)
新 版 本 号: V1.51 (已发行的版本号:V1.50)
下页开始为版本升级报告 No.07031 的附加资料“XP 固有值一览 Type-III V1.51”的内容。
Fuji Machine Mfg.
XP 固有値一覧 Type-III V1.51
2007-12-4現在
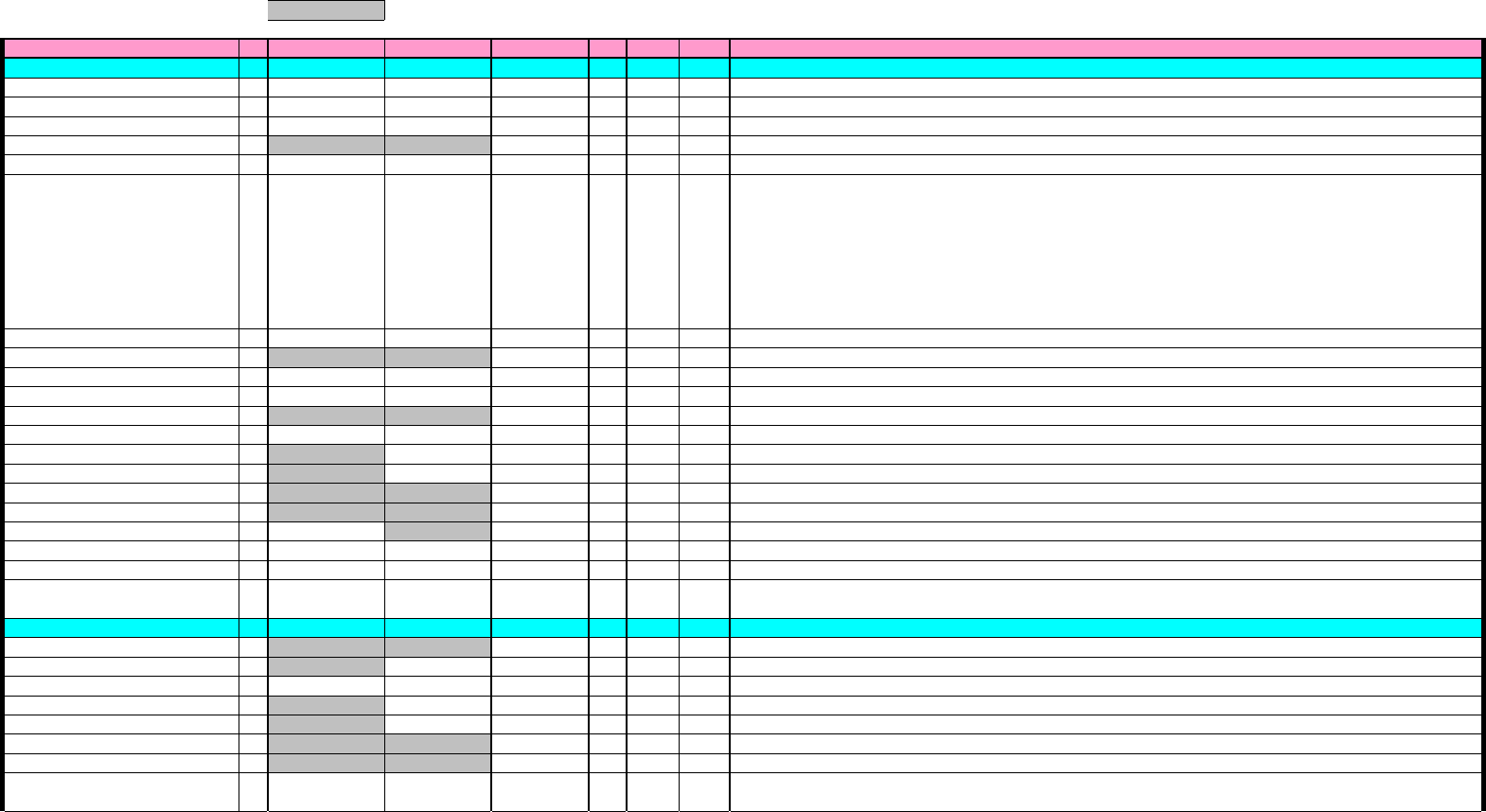
XP固有值一览表 Type-III V1.51
//_/_/_/_/_/_/_/ Proper data /
_
未使用
●XP启动时检查范围。请必须设定在范围以内的值。即使没有输入范围的记述,在整数型时-2147483648~2147483647,小数型时按整数的11位到小数点以下4位为止,字符串型到31个字符为止。
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
________MACHINE_TYPE_______ =
__xpMachineTypeA = 1 2 1~3
--- 否
需要
机种选择项目 XP14*:1 XP24*:2 XP34*:3
__xpMachineTypeB
= 444
--- 否
需要
机种选择项目 全机种:4 电路板搬运尺寸
__xpMachineTypeC
= 3 3 1~3
--- 否
需要
机种选择项目 TypeI:1 TypeII:2 TypeIII:3
__xpMachineTypeD
= 1 1 没有范围
--- 否
需要
一般:1 批量机(1)和试验机(0)的区別,(区别使用的IO)
__xpTI1200A
= 1 1 0~1
--- 否
1:相机TI-1200A
__xpSetCVA1Cam
= 49 61 0~255
--- 否 需要
相机的设定(高分辨率相机建立与相机 相对应的比特)
第1比特:相机1
第2比特:相机2
第3比特:相机3
第4比特:相机4
第5比特: 将低分辨率相机作为HR-50处理
第6比特: 将高分辨率相机作为G20U20处理
第7比特: 将低分辨率相机作为XC-56处理
__ServoPulseReduce
= 0 0 0~1
--- 否
0 : Pn201 = 16384 1 : Pn201 = 8192
__DispMode
= 0 0 0~2
--- 可
XP141选择项目 0:影像处理中一切不显示 1:仅仅在覆盖式中显示 2:全部显示
__CornerRearSide
= 2 2 0~2
--- 否
需要
参照内侧的Corner Pattern进行补正处理的标记的指定 0:没有Corner Dog 1:Corner Dog
__PanelReverseFlow
= 0 0 0~2
--- 否
电路板搬运方向的指定 0:左→右 1:右→左 (与FUJI标准机器同等) 2:右→左
__RevolverInterLock
= 0 0 0~2
--- 否
需要
增加了供料器浮起传感器和变更了吸嘴上升确认传感器 [T1.12e,T1.09h] 变更为0。此时需要
__SmemaFlag
= 0 0 0~2
--- 可
0:标准(FUJI信号) 1:SMEMA规格(以1.2为准) 2:SMEMA规格(以1.0に为准)
__Coplanarity
= 0 0 0~1
--- 否
浮脚检查的指定 0:未对应的机器 1:对应的机器
__UseOverviewCam
= 0 0 0~1
--- 否
观察相机安装的指定 0:无 1:有
__LightingSystem
= 0 0 没有范围
--- 否
未使用
__ASSystem
= 0 0 0~2
--- 否
需要
0:标准机型 1:特殊换线(母机) 2:特殊换线(子机)
__ConvOutSensor
= 1 1 0~1
--- 否
搬运轨道送出端到达传感器 0:未对应的机器 1:对应的机器
__BackupPlateSensor
= 0 0 0~1
--- 否
支撑板干涉确认传感器 0:未对应的机器 1:对应的机器
__MainLiftDwnCounter
= 0 0 0~1
--- 否
需要
Main升降台下降量计测计数器 0:未搭载的机器 1:搭载的机器
__ConveyerType
= 0 0 0~3
--- 否 需要
搬运轨道的种类
0:
标准
1:
相当于
Type1
(有减速传感器&没有
Out Buff
)
2:
相当于
Type2
(有减
速传感器&没有Out Buff) 3:相当于Type3(没有减速传感器(对应OutBuff有或者无))
_________OPERATION_________ =
__BrightLevelArrv = 000
--- 否
判断电路板到达的亮度值 在将__MainStArrvFDChkFlag设定为1的时候使
__TrayDetectMotion
= 0 2 0~2
--- 否
料盘表面检测动作指定 0,2:使用料盘时自动进行 1:进行运转准备时自动进行
__GateMotionSwitch
= 0 0 0~2
--- 可
贴装动作指定 0:使用顺序数据的搬运模式(通常设定) 1:门型模式 2:拱型模式 (T1.12c)
__DisposeWaitTime
= 0 100 0以上
--- 否
在废弃不良元件时,工作头在废弃处的停止时间 [msec]
__TrayAdsorbTime
= 0 1000 0以上
--- 否
在吸取空料盘时,工作头在空料盘的吸取处的停止时间 [msec]
__DisposeConvSide
= 0 0 0~1
--- 否
XP241E 选择项目 0:批量机 1:限定批量机
__ResetCylORTime
= 0 0 0以上
--- 否
从贴装最终吸嘴到达下降端的时间开始到使复位汽缸ON的时间 [msec] (T1.12e,T1.09h)
__PlaceDownEndTimer
= 0 10 0以上
--- 否
贴装时的下降端时间
[
msec
]
XP-242E… 15:Xno.372以前,10:Xno.373以后(对应伺服放大器参数Vol.3-a)
1/24
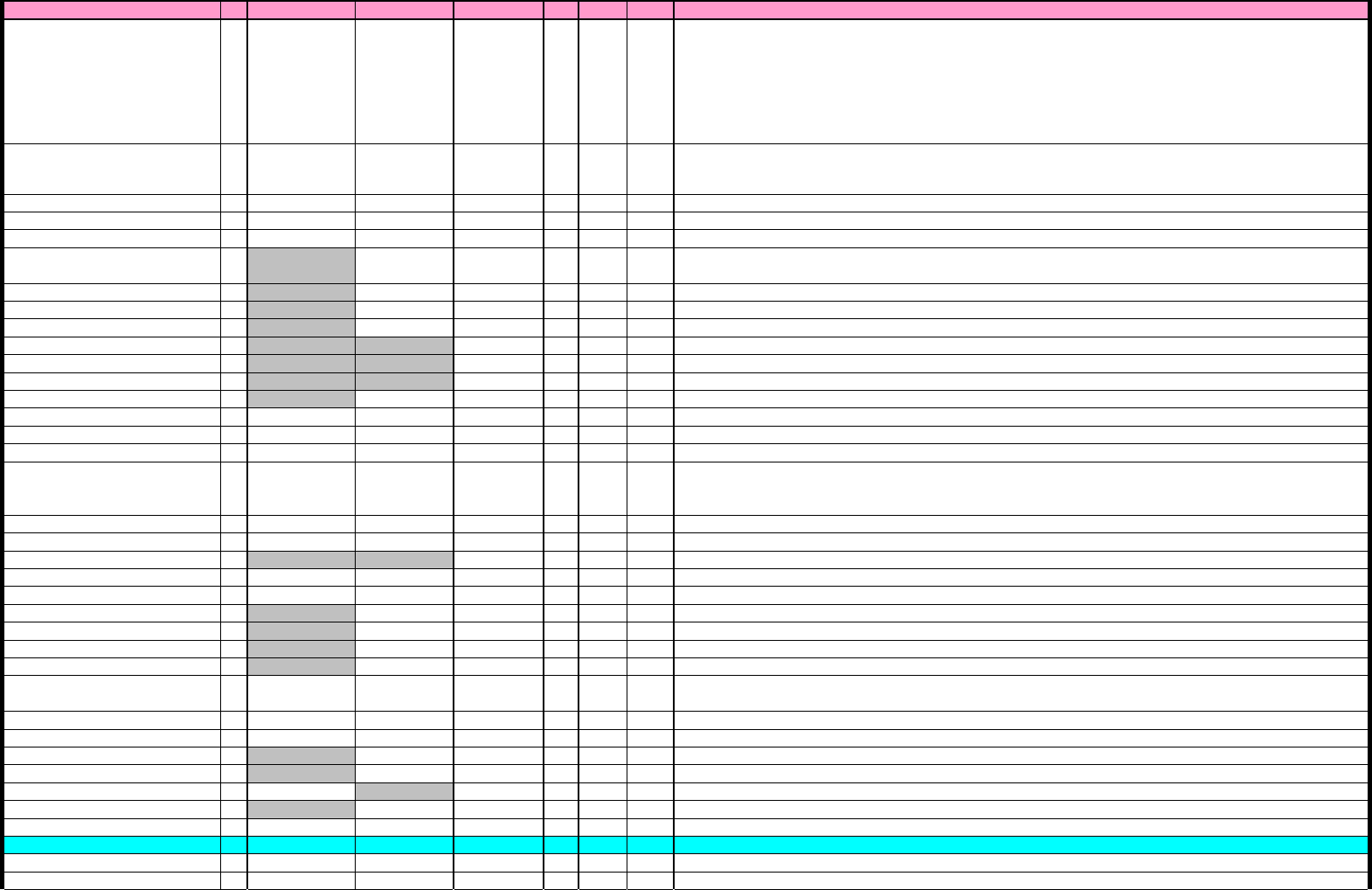
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__DeviceSetChkUse = 33
<TypeI>
0~1
<TypeII/II
I>
0~3
--- 可
元件补充确认指定
<TypeI>0:未使用 1:使用
<TypeII>
0:自动执行元件补充
1:手动执行元件补充(在料尽或者吸取失败时的机器信息画面上进行)
2: 〃
3:手动执行元件补充(在料尽、吸取失败或者影像处理出错时的机器信息画面上进行)
__ConvErrTimePanelGet
= 15000 15000
0,
15000~60000
--- 可
判断从前 道工序来的电路板搬运错误的时间[msec]
在SMEMA上BA有效后,在本固有值的设定时间内,IN到达传感器没有ON的时候,变为错误。(0不监
视错误)
__ConvErrTime
= 0 0 0~60000
--- 否
下一道工序到达确认时间 [msec] 0:10000[msec],小于10000全为10000[msec],上限是
__ConveyerMode
= 1 1 0~2
--- 可
0:高速 1:标准(MAIN送出时以高速开始搬运) 2:特殊(MAIN送出时以减速ON开始搬运,用
Conve
y
erPassMode
= 0 0 0~1
--- 可
0
:通常传送模式(用
MAIN
升降台夹紧)
1
:非夹紧模式(不用
MAIN
升降台夹紧)
__PickUpTimerSide1 = 0 5 0以上
--- 否
延长
Side1
全体的吸取时间
[
msec
]
<242> 10:Xno.372以前, 5:Xno.373以后
__PickUpTimerSide2
= 0 50 0以上
--- 否
延长Side2全体的吸取时间 [msec]
__PickVaccumStartTime
= 0 0 0以上
--- 否
吸取元件动作时的先行时间 [msec] (比到达吸取位置快的设定时间区间前开始真空)
__VacuumDesTime
= 0 70 0以上
--- 否
真空破坏所用时间 [msec]
__VT130ImageProcTwice
= 0 0 没有范围
--- 否
未使用
__TrayEjectCheck
= 0 0 0~2
--- 否
需要
料盘排出确认传感器 0:无效 1:有效 (已有传感器) 2:有效 (新传感器:从T1.12e开始对
__DesStartTime
= 0 0 没有范围
--- 否
未使用
__MultiImageNotDisp
= 0 0 0以上
--- 可
0:表示 1:比表示多画面处理时取入影像(贴装处理时间会变快)
__ConvMtrSpeed
= 340 340 0以上
--- 否
电路板搬运速度 标准340 [mm/sec] (0的时候也同样)
__BlackMaskLevel
= -1 -1 -1~255
--- 否
元件的影像处理时将低于或等于设定亮度值的亮度作为同一亮度除去干扰的功能(-1~255) -
__PCFtpUse
= 0 0 0~1
--- 可
远程控制文件的设定 0:无效 1:有效
__TemplateFind = 3 3 0~3
--- 可
Vi
s
i
on
T
ype
18的模板文件名搜索条件
0:在XP*42上禁止输入 1:元件No.优先 2:元件类型优先 3:只参考元件类型(通常)
(注)在XP*42不满V1.1上设定0重新注册后启动元件数据编辑器(从TypeI的不满T1.12开始变换到
__MainLifterUpEndTimer
= 650 650 0以上
--- 可
升降台上升等待时间 [msec]
__FiducialLampOnTimer
= 0 0 0~1000
--- 可
灯亮后等待时间 [msec] (在基准定位点相机的亮度不稳定的状态下取入影像时使用) (T1.09
__MainStArrvFDChkFlag
= 000
--- 否
需要
用基准定位点相机确认电路板到达 0:未使用 1:使用 (T1.12f)
__ThermalOffsetTime
= 0 360 0以上
--- 可
热膨胀补正处理的动作时机 [sec] ※不进行热膨胀补正时请设定为0。
__ThermalOffsetMark
= 0 0 0~1
--- 可
热膨胀补正参考定位点 0:F定位点 1:机器上位置补正定位点
__NotNzlPosOffset
= 0 0 0~1
--- 可
指定是否获得吸嘴位置修正 0:获取 1:不获取
__VcmBreakChkTime
= 0 100 0以上
--- 否
真空破坏确认传感器等待时间[msec]
__NzlHoleMeasureMode
= 0 0 0~2
--- 可
吸嘴孔位置测定 0:错误停止 1:错误不停止 2:不执行
__MotorFeederMode
= 0 0 0~1
--- 可 不
要
马达供料器送料动作的切换 「0」按原样(元件始终处于吸取的状态) 「1」特殊动作(元件始终
__OpAuxButton
= 0 0 0~1
--- 否
请在安装[操作辅助]
SW
(选项)的机器上设定
1
(有效)
、
没有安装的机器上设定
0
(无效)(默认值)
。[操作辅助]SW的I/O是「X04A:OpAuxButton」。 (注)在安装[操作補助]SW的机器出厂时设定。
__SigTowerFlashInterval
= 0 0 0~2000
--- 可
信号塔的闪烁周期。单位:[msec] 0:2000[msec]
__ProgramOrgPosMode
= 0 0 0~1
--- 可
程序原点自动修正功能的设定 0:无效(FUJI原点) 1:有效((0,0)原点)
__NozzleChangeMotion
= 0 0 0~1
--- 可
吸嘴更换动作 0:拱型移动 1:门型移动
__TrayExchangeMode
= 0 0 0~1
--- 可
料盘更换动作中,指定是否收存使用中的料盘料站。0:收存 1:不收存
__0402_FeedModeSwitch
= 1 1 0~4
--- 可 不
要
0402模式的设定 0: 无效 1: Hi模式 2: Mid模式 3: Low模式 4: ULow模式
__TrayInterfereChk
= 1 1 0~1
--- 可 不
要
吸嘴和料盘的定位板的干涉的设定 0:不检查干涉 1:检查干涉 (注)料盘定位板的高度是23
__SelectStatisticInfoDisp
= 0 0 0~1
--- 可 不
要
统计信息显示的选择(如按坏的顺序排列) 0: 不进行 1: 进行
_________SERVO_OFST________ =
__targetOfst_X = 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
__targetOfst_Y
= 0 0 没有范围
测定值
否
需要
绝对值译码器的修正量 [mm]
2/24