XP固有值一览 Type-III V1 51 (2) - 第10页
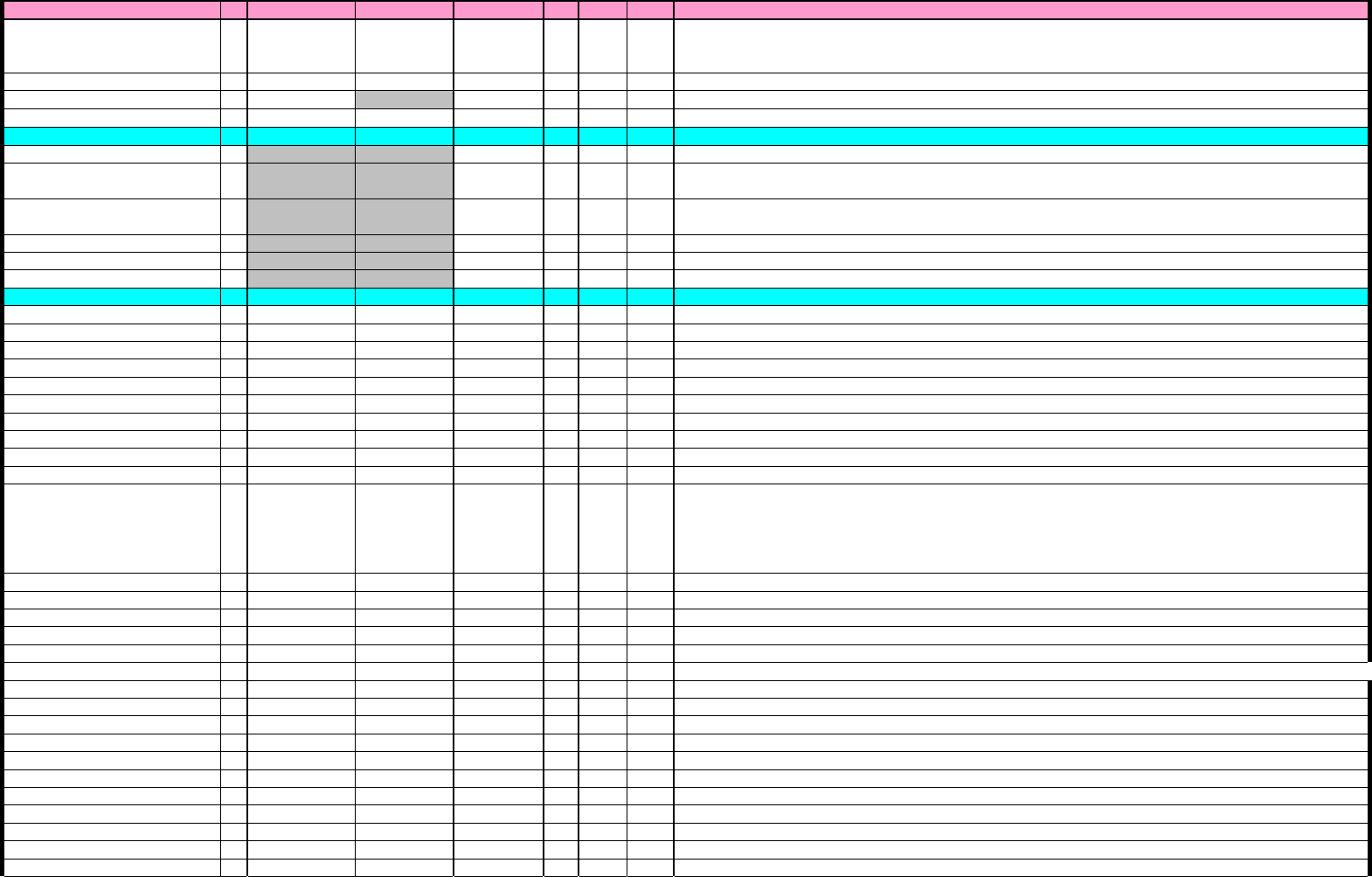
XP 固有値一覧 Type-III V1.51 2007-12-4現在 项目 XP-143E XP243E 输入范围 测定值 User编辑 重新接通电源 解说 __StandBy = 4 4 没有范围 --- 否 信号塔亮灯状态(待机状态) __InChangeBlock = 4 4 没有范围 --- 否 信号塔亮灯状态(换线中) __StopForComplet = 16 16 没有范围 --- 否 信号塔亮灯状态(因完成生产块数而停…
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__CycleStealDistanceLimit = 100 100 0以上
--- 可
从在周期自动补正中得到的基准定位点相机中心到吸嘴旋转中心为止的距离和固有值
_
C
amera
1/2
DistanceX/Y的误差的容许范围 [μm]
※固有值__Camera1DistanceX/Y、__Camera2DistanceX/Y
__CycleStealCenterStartTime = 30 30 0以上
--- 可 不
要
在设定时间[分]经过实际生产的时刻,进行周期自动补正(测定旋转中心)。
__CycleStealCenterTerm
= 10 10 0以上
--- 可 不
要
进行周期循环(旋转中心测定)条件(旋转中心和Conner dog的距离误差**[um]超过设定值时进行
__CycleStealCamGainCtr
= 1 1 0~1
--- 可 不要
周期
循
环的相
机
增益
自
动补正
功
能(0:无效 、1:
有
效)
_________AUTO_SETUP________ =
__ASSMCNum = 0 0 0~3
--- 可
需要
自动换线标记 输入按群组分类的机器台数(1~3) ※不使用时为0或者是1~3以外的数值。
__MCComPort
= 10000 10000
10000~
99999
--- 可 需要
自动换线标记 G开头的机器和其他的机器连接用的接口号(10000~99999)
__PCComPort
= 10000 10000
10000~
99999
--- 可 需要
自动换线标记
G
开头的机器和
IJ
工序连接用的接
口
号(
10000~99999
)
只有在
G
开
头的机器时需要
__ASSFeederChk
= 0 0 0~2
--- 可
需要
自动换线标记 供料器安装的确认方法设定 0:未使用 1:仅仅确认变更的料槽 2:确认
__ASSFeederChkAllSet
= 0 0 0~1
--- 可
需要
自动换线标记 在所确认供料器安装中是否一次性显示OK按键 0:不显示 1:显示
__ASSetupInfoDisp
= 0 0 0~1
--- 可
需要
自动换线标记 是否显示自动换线的Setup Information对话框。0:不显示 1:显示
_________DEBUG_FLAG________ =
__DebugFlag1 = 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag2
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag3
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag4
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag5
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag6
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag7
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag8
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag9
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugFlag10
= 0 0 没有范围
--- 否
调试时使用的标记
__DebugBP
= 0 0 0~3
--- 否
阈值测定的调试用的固有值
:
阈值测定时的画面显示功能的切换
0:阈值测定时没有任何显示。
1:阈值测定时将测定结果的阈值以绿色显示在画面上。
2:阈值测定时将测定范围以绿色显示在画面上。
3:阈值测定时将测定结果的阈值和测定范围以绿色显示在画面上。
__DebugDLL
= 0 0 0~3
--- 否
将Dynamic Logical Level(自动地求得LL值)以绿色显示 [T1.12c]
__DebugBML
= 0 0 0~3
--- 否
将BlackMaskLevel以黄色显示
__DebugPartsCheck
= 0 0 0~3
否
元件有无检查的调试用的固有值固有值 0:不显示。 1:显示测定结果 2:显示测定范围 3:全部显
__CStructCheck
= 0 0 0~1
--- 否
需要
构造体内存违法写入检查。 (1时ON)
__StbCheckUse
= 0 0 0~1
--- 可
贴装时伺服静定确认功能的有效/无效设定。 0:无效 1:有效
UseErrPassMode
= 0 0 0~1
--- 可
0:不将错误通过包含在补件模式选择项中。1:将错误通过包含在补件模式选择项中。
__LevelFlag
= 0 0 没有范围
--- 否
<未使用>
__InAutoOperation
= 2 2 没有范围
--- 否
信号塔亮灯状态(自动运转中)
__InLoading
= 2 2 没有范围
--- 否
信号塔亮灯状态(电路板载入动作中)
__WaitBoard
= 4 4 没有范围
--- 否
信号塔亮灯状态(电路板等待)
__WaitInputNextSchedule
= 4 4 没有范围
--- 否
信号塔亮灯状态(等待下工序输入)
__WarnLackOfParts
= 8 8 没有范围
--- 否
信号塔亮灯状态(料尽预告)
__StopForLackOfParts
= 16 16 没有范围
--- 否
信号塔亮灯状态(因料尽而停止机器)
__StopForError
= 64 64 没有范围
--- 否
信号塔亮灯状态(因发生异常而停止机器)
__StatisticalWarning
= 8 8 没有范围
--- 否
信号塔亮灯状态(统计警告)
__OpeCallInChangeBlock
= 16 16 没有范围
--- 否
信号塔亮灯状态(换线时呼叫操作者)
__ProductionProgram
= 32 32 没有范围
--- 否
信号塔亮灯状态(生产程序・影像处理错误)
8/24
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__StandBy = 4 4 没有范围
--- 否
信号塔亮灯状态(待机状态)
__InChangeBlock
= 4 4 没有范围
--- 否
信号塔亮灯状态(换线中)
__StopForComplet
= 16 16 没有范围
--- 否
信号塔亮灯状态(因完成生产块数而停止)
__StageChangeAlarm
= 8 8 没有范围
--- 否
信号塔亮灯状态(按照AA模式移动了平台)
_____CONV_DELAY_TIMER______ =
__InArrvOnDelayTimer = 10 10 0以上
--- 可
IN到达传感器的ON延时设定 [msec]
__MainDecOnDelayTimer
= 10 10 0以上
--- 可
MAIN减速传感器的ON延时设定 [msec]
__MainArrvOnDelayTimer
= 10 10 0以上
--- 可
MAIN到达传感器的ON延时设定 [msec]
__MainPassOnDelayTimer
= 10 10 0以上
--- 可
MAIN通过传感器的ON延时设定 [msec]
__OutArrvOnDelayTimer
= 10 10 0以上
--- 可
OUT到达传感器的ON延时设定 [msec]
__OutPassOnDelayTimer
= 10 10 0以上
--- 可
OUT通过传感器的ON延时设定 [msec]
__MainExhaustOnDelayTimer
= 450 450 0~1000
--- 可
从
MAIN
上升端
ON
后到解除减速开始为止的
ON
延时设定[
msec
]
※请在主升降台消除背压的改造机器上使用。
__UnClampVcmOffDelayTimer
= 0 0 0以上
--- 可
在MAIN平台松开时的电路板吸取真空OFF延时设定 [msec]
__ClampVcmOnChkDelayTimer
= 0 0 0以上
--- 可
在MAIN平台夹紧后到检查电路板吸取真空确认传感器为止的延时设定 [msec]
__MainEjectDelayTimer
= 0 0 -1~99999
--- 可 需要
在MAIN平台接受升降台下降指令后后到将搬运轨道马达ON为止的等待时间的设定
。
"-1" =下降指令450[ms]后搬运开始固有值「_MainLftDwnCounter」是“1”的时候在下降电路板尺
寸的厚度后开始排出。
"1以上" =升降台下降开始后到指定的数值[ms]后开始搬运
__MainLiftOnOffDelayTimer
= 3 3 0以上
--- 可
MAIN升降台的上升端和下降端传感器的实际I/O的ON/OFF延时设定 [msec]
__MainLiftDwnOnDelayTimer
= 500 500 0以上
--- 可
MAIN
升降台的下降端传感器的
ON
延时设定
[
msec
]
仅仅在「__MainLftDwnCounter」是"1"的时候有效。
_________TOUCH_PANEL_______ =
__TouchPanelType = 1 1 0~2
--- 否
需要
0:不使用触摸面板 1:EMT0550, AHL-71 2:IMES7512
__TPDblClickSpeed
= 350 350 100~3000
--- 否
识别鼠标的双击的时间 [msec]
__TPDblClickDistance
= 30 30 1~120
--- 否
双击的点击间隔
_____REVOLVER_CLEANING_____ =
__RevolverCleaningCount1 = 50 50 1~1000
--- 可
旋转工作头清扫执行次数
__RevolverCleaningCount2
= 6 6 1~100
--- 可
旋转工作头清扫的设定数
__RevolverDryCount
= 5 5 1~1000
--- 可
旋转工作头清扫器干燥执行次数
__LubricatePermeatCount1
= 10 10 1~1000
--- 可
旋转工作头清扫润滑剂浸透执行次数
__LubricatePermeatCount2
= 2 2 1~100
--- 可
旋转工作头清扫润滑剂浸透设定次数
__LubricateBlowCount
= 5 5 1~1000
--- 可
旋转工作头清扫润滑剂喷射执行次数
__RevolverCleaningWaitTimer = 0 0 0以上
--- 可
旋转工作头清扫执行时Z轴下降端停留时间[msec]
__RevolverDryWaitTimer
= 500 500 0以上
--- 可
旋转工作头清扫器干燥执行时Z轴下降端停留时间[msec]
__LubricatePermeatWaitTimer = 0 0 0以上
--- 可
旋转工作头清扫润滑剂浸透执行时Z轴下降端停留时间[msec]
__LubricateBlowWaitTimer
= 500 500 0以上
--- 可
旋转工作头清扫润滑剂喷射执行时Z轴下降端停留时间[msec]
__RevolverResetDelayTimer
= 200 200 0以上
--- 可
旋转工作头清扫执行时的复位汽缸下降确认传感器OFF后到下次动作的延迟时间[msec]
__ShakeDownExecuteCount
= 50 50 1~1000
--- 可
衰减振动执行次数
__ShakeDownExecuteSpeed
= 100 100 1~100
--- 可
衰减振动动作时的速度(100相当于Elegance1.00)
__RevolverCleaningButtonDispMode = 1 1 0~3
--- 可
旋转工作头清扫画面的按钮显示 ①[工作头退避] ②[清扫位置移动] 0:①②都不显示 1:显示① 2:
_________SERVO_LIMIT_______ =
X_PlusLimit = 835 835 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
X_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Y_PlusLimit
= 813 1174 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Y_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Z_PlusLimit
= 14.5 55 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Z_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
9/24
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
F_PlusLimit = 4.5 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
F_MinusLimit
= -10.8 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
G_PlusLimit
= 4.5 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
G_MinusLimit
= -10.8 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
T_PlusLimit
= 0 520 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
T_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
U_PlusLimit
= 0 532 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
U_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
C_PlusLimit
= 51 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
C_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
_______JOG_BASE_SPEED______ =
---
X_jogBaseSpeed = 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
Y_jogBaseSpeed = 7000 10000 0以上
--- 否
最低微动速度的指定
[
逻辑脉冲
/
sec]
XP-142E… 10000:Xno.517以前,7000:Xno.518以后
Z_jogBaseSpeed
= 2000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
Q_jogBaseSpeed
= 50000 50000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
R_jogBaseSpeed
= 50000 50000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
F_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
G_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
T_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
U_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
C_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
______SERVO_PARAMETER______ =
---
※
变
更SERVO_PARAMETER的
数值
的时候,需要先按下[运
转准备
]SW使
其
暂时OFF后再ON。
x_MaxV
= 16000000 16000000 0以上
--- 否
X轴 最大速度 [逻辑脉冲/sec]
x_MaxA
= 240000000 230000000 0以上
--- 否
X轴 最大加速度 [逻辑脉冲/sec2]
x_ptpGain
= 80 100 0以上
--- 否
X
轴
移动中增益
XP-242E… 100:Xno.372以前,110:Xno.373以后
x_stGain
= 80 100 0以上
--- 否
X
轴
定位中增益
XP-242E… 100:Xno.372以前,110:Xno.373以后
x_afterGain
= 75 100 0以上
--- 否
X
轴
静止中增益
XP-242E… 50:Xno.372以前,110:Xno.373以后
x_P_CON_Start
= 6 3 0以上
--- 否
X
轴
P_CON
开始时间
[
msec
]
XP-242E… 6:Xno.372以前,0:Xno.373以后
x_integralGain
= 75 80 0以上
--- 否
X
轴
积分增益
XP-242E… 50:Xno.372以前,110:Xno.373以后
x_AxisValid
= 1 1 0以上
--- 否
X轴 0:无视该轴 1:使该轴有效
x_spare2
= 1 1 0以上
--- 否
X轴 0:无视该轴 1:使该轴有效
x_CurveNo
= 1 1 0以上
--- 否
X轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
y_MaxV
= 25000000 25000000 0以上
--- 否
Y轴 最大速度 [逻辑脉冲/sec]
y_MaxA
= 372000000 448000000 0以上
--- 否
Y轴 最大加速度 [逻辑脉冲/sec2]
y_ptpGain =
120 110
0以上
--- 否
Y轴
移动中增益
XP-142E… 130:Xno.517以前, 120:Xno.518以后
XP-242E…130:Xno.372以前,135:Xno.373以后
y_stGain
=
120 110
0以上
--- 否
Y轴
定位中增益
XP-142E… 130:Xno.517以前, 120:Xno.518以后
XP-242E…130:Xno.372以前,135:Xno.373以后
y_afterGain
= 80 55 0以上
--- 否
Y轴 静止中增益
10/24