XP固有值一览 Type-III V1 51 (2) - 第11页
XP 固有値一覧 Type-III V1.51 2007-12-4現在 项目 XP-143E XP243E 输入范围 测定值 User编辑 重新接通电源 解说 F_PlusLimit = 4.5 0 没有范围 测定值 否 需要 伺服轴可以移动的范围 [mm] F_MinusLimit = -10.8 0 没有范围 测定值 否 需要 伺服轴可以移动的范围 [mm] G_PlusLimit = 4.5 0 没有范围 测定值 否 需要 伺服轴…
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__StandBy = 4 4 没有范围
--- 否
信号塔亮灯状态(待机状态)
__InChangeBlock
= 4 4 没有范围
--- 否
信号塔亮灯状态(换线中)
__StopForComplet
= 16 16 没有范围
--- 否
信号塔亮灯状态(因完成生产块数而停止)
__StageChangeAlarm
= 8 8 没有范围
--- 否
信号塔亮灯状态(按照AA模式移动了平台)
_____CONV_DELAY_TIMER______ =
__InArrvOnDelayTimer = 10 10 0以上
--- 可
IN到达传感器的ON延时设定 [msec]
__MainDecOnDelayTimer
= 10 10 0以上
--- 可
MAIN减速传感器的ON延时设定 [msec]
__MainArrvOnDelayTimer
= 10 10 0以上
--- 可
MAIN到达传感器的ON延时设定 [msec]
__MainPassOnDelayTimer
= 10 10 0以上
--- 可
MAIN通过传感器的ON延时设定 [msec]
__OutArrvOnDelayTimer
= 10 10 0以上
--- 可
OUT到达传感器的ON延时设定 [msec]
__OutPassOnDelayTimer
= 10 10 0以上
--- 可
OUT通过传感器的ON延时设定 [msec]
__MainExhaustOnDelayTimer
= 450 450 0~1000
--- 可
从
MAIN
上升端
ON
后到解除减速开始为止的
ON
延时设定[
msec
]
※请在主升降台消除背压的改造机器上使用。
__UnClampVcmOffDelayTimer
= 0 0 0以上
--- 可
在MAIN平台松开时的电路板吸取真空OFF延时设定 [msec]
__ClampVcmOnChkDelayTimer
= 0 0 0以上
--- 可
在MAIN平台夹紧后到检查电路板吸取真空确认传感器为止的延时设定 [msec]
__MainEjectDelayTimer
= 0 0 -1~99999
--- 可 需要
在MAIN平台接受升降台下降指令后后到将搬运轨道马达ON为止的等待时间的设定
。
"-1" =下降指令450[ms]后搬运开始固有值「_MainLftDwnCounter」是“1”的时候在下降电路板尺
寸的厚度后开始排出。
"1以上" =升降台下降开始后到指定的数值[ms]后开始搬运
__MainLiftOnOffDelayTimer
= 3 3 0以上
--- 可
MAIN升降台的上升端和下降端传感器的实际I/O的ON/OFF延时设定 [msec]
__MainLiftDwnOnDelayTimer
= 500 500 0以上
--- 可
MAIN
升降台的下降端传感器的
ON
延时设定
[
msec
]
仅仅在「__MainLftDwnCounter」是"1"的时候有效。
_________TOUCH_PANEL_______ =
__TouchPanelType = 1 1 0~2
--- 否
需要
0:不使用触摸面板 1:EMT0550, AHL-71 2:IMES7512
__TPDblClickSpeed
= 350 350 100~3000
--- 否
识别鼠标的双击的时间 [msec]
__TPDblClickDistance
= 30 30 1~120
--- 否
双击的点击间隔
_____REVOLVER_CLEANING_____ =
__RevolverCleaningCount1 = 50 50 1~1000
--- 可
旋转工作头清扫执行次数
__RevolverCleaningCount2
= 6 6 1~100
--- 可
旋转工作头清扫的设定数
__RevolverDryCount
= 5 5 1~1000
--- 可
旋转工作头清扫器干燥执行次数
__LubricatePermeatCount1
= 10 10 1~1000
--- 可
旋转工作头清扫润滑剂浸透执行次数
__LubricatePermeatCount2
= 2 2 1~100
--- 可
旋转工作头清扫润滑剂浸透设定次数
__LubricateBlowCount
= 5 5 1~1000
--- 可
旋转工作头清扫润滑剂喷射执行次数
__RevolverCleaningWaitTimer = 0 0 0以上
--- 可
旋转工作头清扫执行时Z轴下降端停留时间[msec]
__RevolverDryWaitTimer
= 500 500 0以上
--- 可
旋转工作头清扫器干燥执行时Z轴下降端停留时间[msec]
__LubricatePermeatWaitTimer = 0 0 0以上
--- 可
旋转工作头清扫润滑剂浸透执行时Z轴下降端停留时间[msec]
__LubricateBlowWaitTimer
= 500 500 0以上
--- 可
旋转工作头清扫润滑剂喷射执行时Z轴下降端停留时间[msec]
__RevolverResetDelayTimer
= 200 200 0以上
--- 可
旋转工作头清扫执行时的复位汽缸下降确认传感器OFF后到下次动作的延迟时间[msec]
__ShakeDownExecuteCount
= 50 50 1~1000
--- 可
衰减振动执行次数
__ShakeDownExecuteSpeed
= 100 100 1~100
--- 可
衰减振动动作时的速度(100相当于Elegance1.00)
__RevolverCleaningButtonDispMode = 1 1 0~3
--- 可
旋转工作头清扫画面的按钮显示 ①[工作头退避] ②[清扫位置移动] 0:①②都不显示 1:显示① 2:
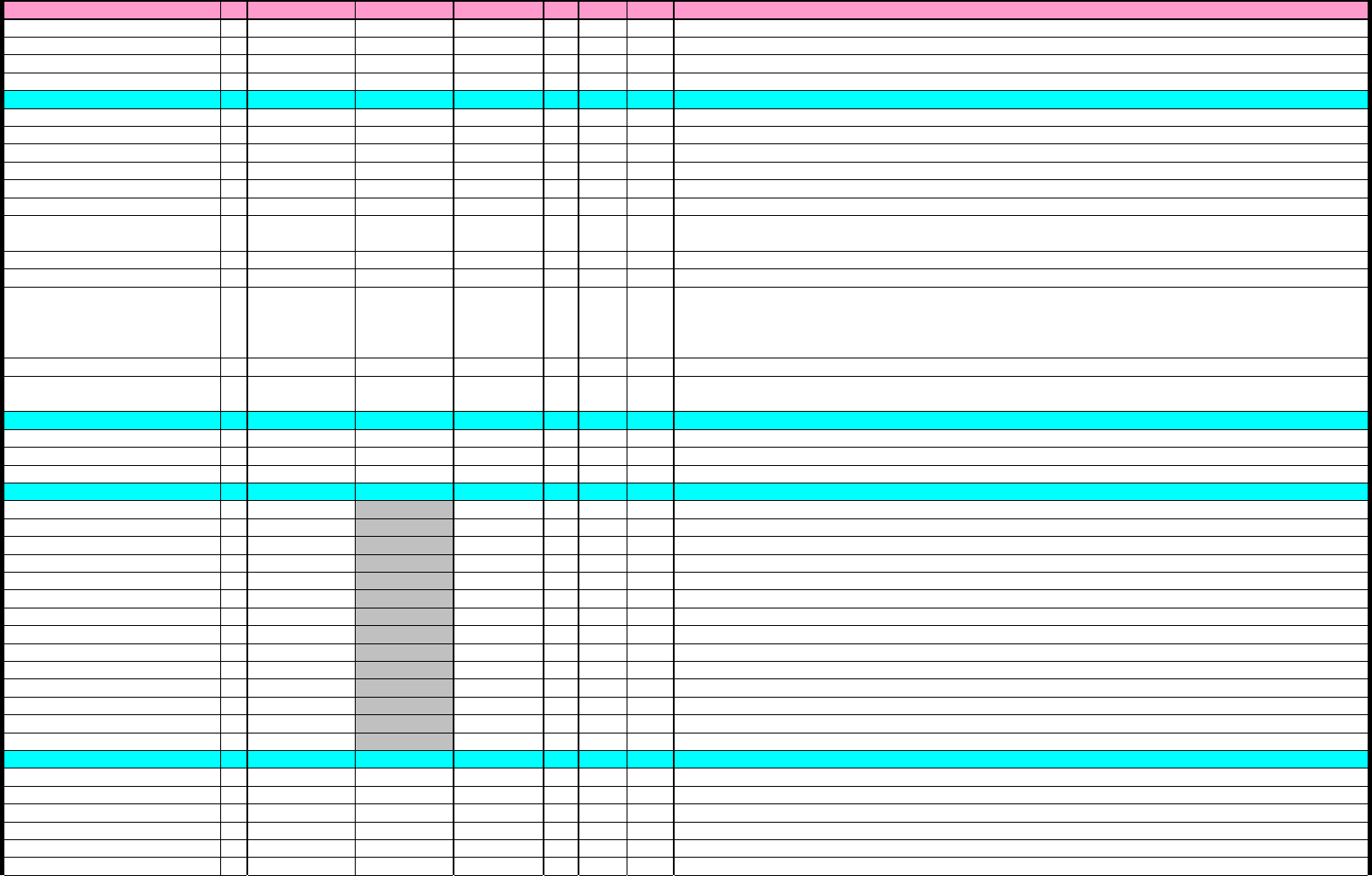
_________SERVO_LIMIT_______ =
X_PlusLimit = 835 835 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
X_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Y_PlusLimit
= 813 1174 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Y_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Z_PlusLimit
= 14.5 55 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
Z_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
9/24
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
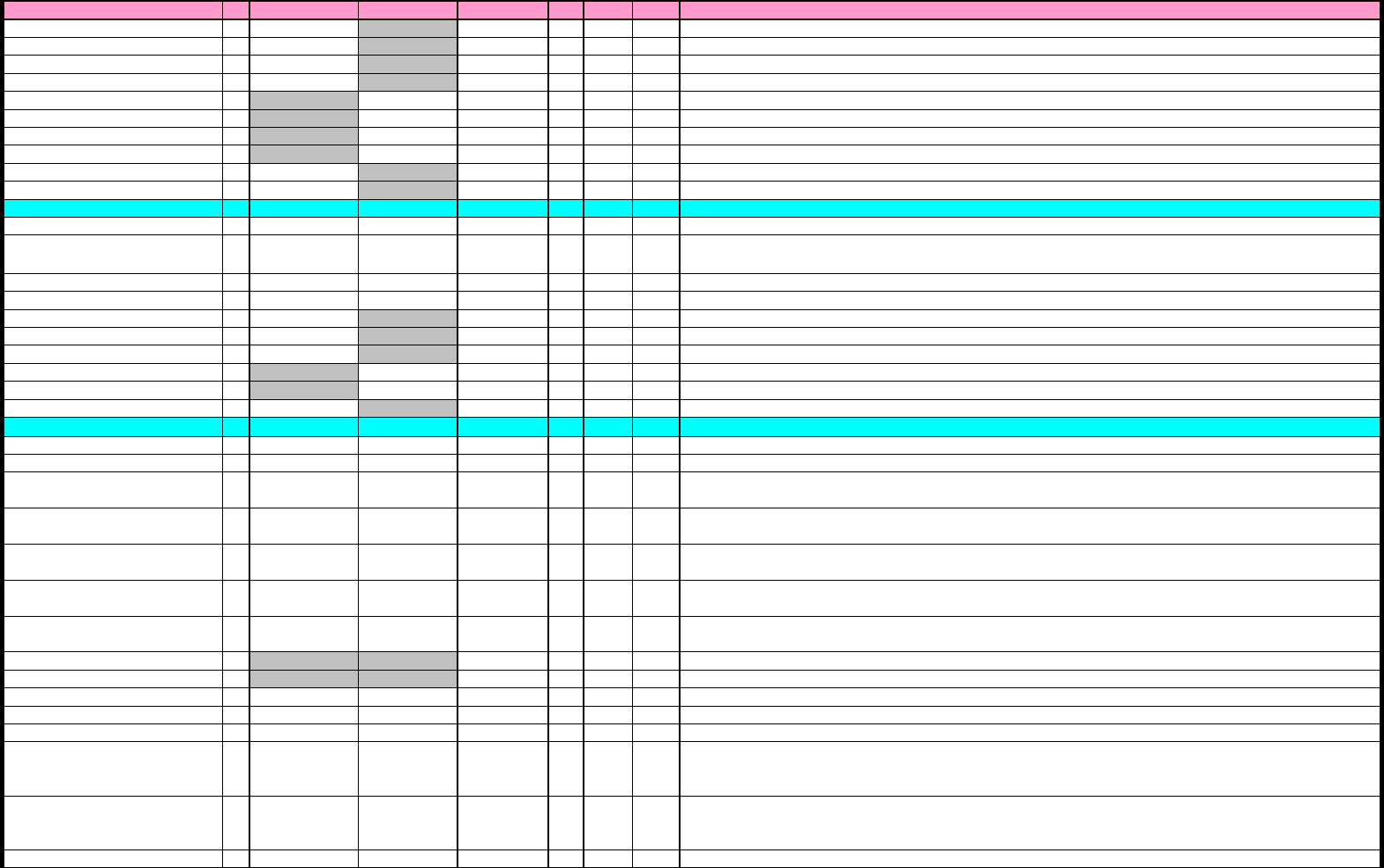
F_PlusLimit = 4.5 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
F_MinusLimit
= -10.8 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
G_PlusLimit
= 4.5 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
G_MinusLimit
= -10.8 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
T_PlusLimit
= 0 520 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
T_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
U_PlusLimit
= 0 532 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
U_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
C_PlusLimit
= 51 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
C_MinusLimit
= 0 0 没有范围
测定值
否
需要
伺服轴可以移动的范围 [mm]
_______JOG_BASE_SPEED______ =
---
X_jogBaseSpeed = 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
Y_jogBaseSpeed = 7000 10000 0以上
--- 否
最低微动速度的指定
[
逻辑脉冲
/
sec]
XP-142E… 10000:Xno.517以前,7000:Xno.518以后
Z_jogBaseSpeed
= 2000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
Q_jogBaseSpeed
= 50000 50000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
R_jogBaseSpeed
= 50000 50000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
F_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
G_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
T_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
U_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
C_jogBaseSpeed
= 10000 10000 0以上
--- 否
最低微动速度的指定 [逻辑脉冲/sec]
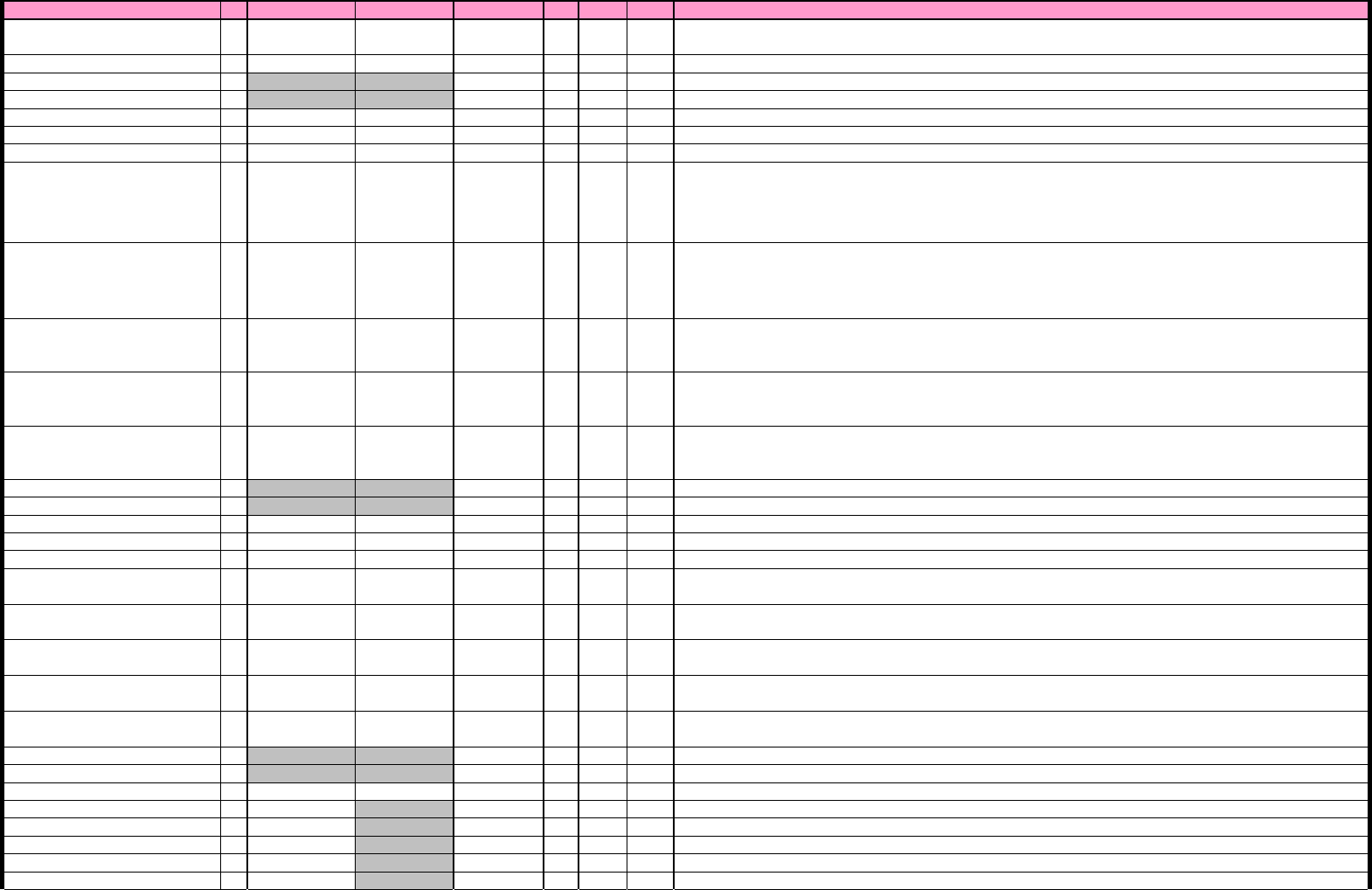
______SERVO_PARAMETER______ =
---
※
变
更SERVO_PARAMETER的
数值
的时候,需要先按下[运
转准备
]SW使
其
暂时OFF后再ON。
x_MaxV
= 16000000 16000000 0以上
--- 否
X轴 最大速度 [逻辑脉冲/sec]
x_MaxA
= 240000000 230000000 0以上
--- 否
X轴 最大加速度 [逻辑脉冲/sec2]
x_ptpGain
= 80 100 0以上
--- 否
X
轴
移动中增益
XP-242E… 100:Xno.372以前,110:Xno.373以后
x_stGain
= 80 100 0以上
--- 否
X
轴
定位中增益
XP-242E… 100:Xno.372以前,110:Xno.373以后
x_afterGain
= 75 100 0以上
--- 否
X
轴
静止中增益
XP-242E… 50:Xno.372以前,110:Xno.373以后
x_P_CON_Start
= 6 3 0以上
--- 否
X
轴
P_CON
开始时间
[
msec
]
XP-242E… 6:Xno.372以前,0:Xno.373以后
x_integralGain
= 75 80 0以上
--- 否
X
轴
积分增益
XP-242E… 50:Xno.372以前,110:Xno.373以后
x_AxisValid
= 1 1 0以上
--- 否
X轴 0:无视该轴 1:使该轴有效
x_spare2
= 1 1 0以上
--- 否
X轴 0:无视该轴 1:使该轴有效
x_CurveNo
= 1 1 0以上
--- 否
X轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
y_MaxV
= 25000000 25000000 0以上
--- 否
Y轴 最大速度 [逻辑脉冲/sec]
y_MaxA
= 372000000 448000000 0以上
--- 否
Y轴 最大加速度 [逻辑脉冲/sec2]
y_ptpGain =
120 110
0以上
--- 否
Y轴
移动中增益
XP-142E… 130:Xno.517以前, 120:Xno.518以后
XP-242E…130:Xno.372以前,135:Xno.373以后
y_stGain
=
120 110
0以上
--- 否
Y轴
定位中增益
XP-142E… 130:Xno.517以前, 120:Xno.518以后
XP-242E…130:Xno.372以前,135:Xno.373以后
y_afterGain
= 80 55 0以上
--- 否
Y轴 静止中增益
10/24
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
y_P_CON_Start = 6 5 0以上
--- 否
Y
轴
P_CON
开始时间
[
msec
]
XP-242E… 6:Xno.372以前,0:Xno.373以后
y_integralGain
= 30 55 0以上
--- 否
Y轴 积分增益
y_AxisValid
= 1 1 0以上
--- 否
Y轴 0:无视该轴 1:使该轴有效
y_spare2
= 1 1 0以上
--- 否
Y轴 0:无视该轴 1:使该轴有效
y_CurveNo
= 1 1 0以上
--- 否
Y轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
z_MaxV
= 15000000 15000000 0以上
--- 否
Z轴 最大速度 [逻辑脉冲/sec]
z_MaxA
= 1600000000 830000000 0以上
--- 否
Z轴 最大加速度 [逻辑脉冲/sec2]
z_ptpGain
=
170 145 0以上 --- 否
Z轴 移动中增益
XP-142E…从200或者180变更数值时,需要变更伺服参数。请参考技术联络书
XP-242E…180:Xno.372以前,145:Xno.373以后(对应伺服放大器参数Vol.3-a)
z_stGain
=
170 145 0以上 --- 否
Z轴 移动中增益
XP-142E…从200或者180变更数值时,需要变更伺服参数。请参考技术联络书
XP-242E…180:Xno.372以前,145:Xno.373以后(对应伺服放大器参数Vol.3-a)
z_afterGain
= 100 70 0以上
--- 否
Z轴
静止中增益
XP-142E…从200变更数值时,需要变更伺服参数。请参考技术联络书
XP-242E…180:Xno.372以前,70:Xno.373以后(对应伺服放大器参数Vol.3-a)
z_P_CON_Start
=
6(NSK制2根)
4(THK制2根)
4 0以上 --- 否
Z轴 P_CON开始时间 [msec]
XP-142E…2根螺丝时有NSK制和THK制.请参考技术联络书(No.04313)。
XP
-
242E
…
6:Xno.372以前,4:Xno.373以后(对应伺服放大器参数Vol.3
-
a)
z_integralGain = 100 60 0以上
--- 否
Z轴
积分增益
XP-142E…从150变更数值时,需要变更伺服参数。请参考技术联络书
XP-242E…180:Xno.372以前,60:Xno.373以后(对应伺服放大器参数Vol.3-a)
z_AxisValid
= 1 1 0以上
--- 否
Z轴 0:无视该轴 1:使该轴有效
z_spare2
= 1 1 0以上
--- 否
Z轴 0:无视该轴 1:使该轴有效
z_CurveNo
= 3 1 0以上
--- 否
Z轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
q_MaxV
= 315000000 210000000 0以上
--- 否
θ轴 最大速度 [逻辑脉冲/sec]
q_MaxA
= 13000000000 10000000000 0以上
--- 否
θ轴 最大加速度 [逻辑脉冲/sec2]
q_ptpGain
= 118 135 0以上
--- 否
θ轴
移动中增益
XP-242E… 225:Xno.372以前,135:Xno.373以后
q_stGain
= 118 135 0以上
--- 否
θ轴
定位中增益
XP-242E… 225:Xno.372以前,135:Xno.373以后
q_afterGain
= 100 100 0以上
--- 否
θ轴
静止中增益
XP-242E… 300:Xno.372以前,135:Xno.373以后
q_P_CON_Start
= 6 3 0以上
--- 否
θ轴
P_CON
开始时间
[
msec
]
XP-242E… 3:Xno.372以前,3:Xno.373以后
q_integralGain
= 30 80 0以上
--- 否
θ轴
积分增益
XP-242E… 300:Xno.372以前,150:Xno.373以后
q_AxisValid
= 1 1 0以上
--- 否
θ轴 0:无视该轴 1:使该轴有效
q_spare2
= 1 1 0以上
--- 否
θ轴 0:无视该轴 1:使该轴有效
q_CurveNo
= 3 1 0以上
--- 否
θ轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
r_MaxV
= 160000000 0 0以上
--- 否
R轴 最大速度 [逻辑脉冲/sec]
r_MaxA
= 12000000000 0 0以上
--- 否
R轴 最大加速度 [逻辑脉冲/sec2]
r_ptpGain
= 100 0 0以上
--- 否
R轴 移动中增益
r_stGain
= 100 0 0以上
--- 否
R轴 定位中增益
r_afterGain
= 100 0 0以上
--- 否
R轴 静止中增益
11/24