XP固有值一览 Type-III V1 51 (2) - 第15页
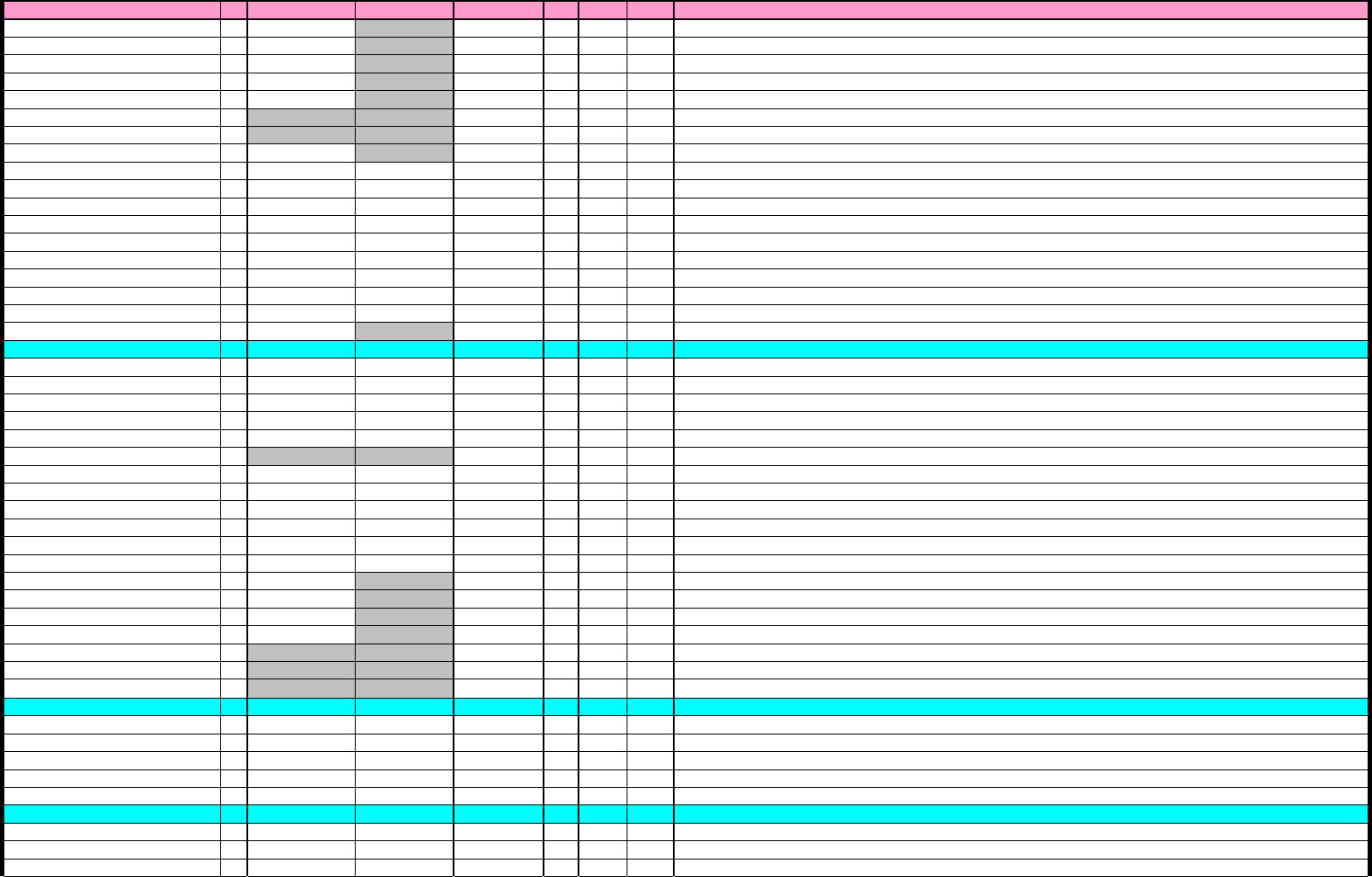
XP 固有値一覧 Type-III V1.51 2007-12-4現在 项目 XP-143E XP243E 输入范围 测定值 User编辑 重新接通电源 解说 Y_Stage2org = 805 842 没有范围 测定值 否 平台2原点 Y [mm] X_Stage3org = 0 0 没有范围 --- 否 平台3原点 Y_Stage3org = 0 0 没有范围 --- 否 平台3原点 X_Stage4org = 0 0 没有范围 -…
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
c_ptpGain = 100 0 0以上
--- 否
C轴 移动中增益
c_stGain
= 100 0 0以上
--- 否
C轴 定位中增益
c_afterGain
= 120 0 0以上
--- 否
C轴 静止中增益
c_P_CON_Start
= 6 0 0以上
--- 否
C轴 P_CON开始时间 [msec]
c_integralGain
= 120 0 0以上
--- 否
C轴 积分增益
c_AxisValid
= 1 0 0以上
--- 否
C轴 0:无视该轴 1:使该轴有效
c_spare2
= 1 0 0以上
--- 否
C轴 0:无视该轴 1:使该轴有效
c_CurveNo
= 1 0 0以上
--- 否
C轴 凸轮曲线号码 1:变形正弦 2:摆线曲线 3:NC2 ※有0~17作为出厂值固定。
x_FeedforwardRatio
= 55 0 0~100.0
测定值
否
X轴的Feedforward前馈控制比率
y_FeedforwardRatio = 78 0 0~100.0
测定值
否
Y轴的Feedforward前馈控制比率
z_FeedforwardRatio = 0 0 0~100.0
测定值
否
Z轴的Feedforward前馈控制比率
q_FeedforwardRatio = 77 0 0~100.0
测定值
否
Q轴的Feedforward前馈控制比率
r_FeedforwardRatio = 83 0 0~100.0
测定值
否
R轴的Feedforward前馈控制比率
f_FeedforwardRatio = 0 0 0~100.0
测定值
否
F轴的Feedforward前馈控制比率
g_FeedforwardRatio = 0 0 0~100.0
测定值
否
G轴的Feedforward前馈控制比率
t_FeedforwardRatio = 0 68 0~100.0
测定值
否
T轴的Feedforward前馈控制比率
u_FeedforwardRatio = 0 0 0~100.0
测定值
否
U轴的Feedforward前馈控制比率
c_FeedforwardRatio = 0 0 0~100.0
测定值
否
C轴的Feedforward前馈控制比率
_______CAMERA_OFFSET_______ =
__Camera1DistanceX = 101 68.5 没有范围
测定值
否
定位相机的中心到吸嘴轴心的距离X [mm]
__Camera1DistanceY = 0 0 没有范围
测定值
否
定位相机的中心到吸嘴轴心的距离Y [mm]
__Camera2DistanceX = 101 68.5 没有范围
测定值
否
定位相机的中心到吸嘴轴心的距离X [mm]
__Camera2DistanceY = 0 0 没有范围
测定值
否
定位相机的中心到吸嘴轴心的距离Y [mm]
__DegFdclCam1Theta = 0 0 没有范围
测定值
否
基准相机相对于伺服轴的倾斜 [°]
__DegFdclCam2Theta = 0 0 没有范围
--- 否
未使用
__Camera1CenterX
= 0 0 没有范围
测定值
否
Side1相机的中心位置X [mm]
__Camera1CenterY = 0 0 没有范围
测定值
否
Side1相机的中心位置Y [mm]
__Camera1Theta = 0 0 没有范围
测定值
否
Side1相机的倾斜(deg) [°]
__Camera2CenterX = 0 0 没有范围
测定值
否
Side2相机的中心位置X [mm]
__Camera2CenterY = 0 0 没有范围
测定值
否
Side2相机的中心位置Y [mm]
__Camera2Theta = 0 0 没有范围
测定值
否
Side2相机的倾斜 [°]
__Camera1LeanRatioX = 0 0 没有范围
测定值
否
前方相机1垂直方向的倾斜X
__Camera1LeanRatioY = 0 0 没有范围
测定值
否
前方相机1垂直方向的倾斜Y
__Camera2LeanRatioX = 0 0 没有范围
测定值
否
后方相机2垂直方向的倾斜X
__Camera2LeanRatioY = 0 0 没有范围
测定值
否
后方相机2垂直方向的倾斜Y
__OverviewCamCenterX = 0 0 没有范围
测定值
否
从Overview相机的影像中心点的程序原点开始的程序坐标系上的X方向的距离 [mm]
__OverviewCamCenterY = 0 0 没有范围
测定值
否
从Overview相机的影像中心点的程序原点开始的程序坐标系上的Y方向的距离 [mm]
__OverviewCamTheta
= 00没
有
范围 测定值
否
Overvie
w
相
机
旋
转角度
补正
值
[deg]
_____CORNERDOG_POSITION____ =
__CornerDogPosX1 = 24.0 27.4 没有范围
否
需要
Coner Dog1位置X[mm]
__CornerDogPosY1
= 17.5 20.0 没有范围
否
需要
Coner Dog1位置Y[mm]
__CornerDogPosX2
= -24.0 27.4 没有范围
否
需要
Coner Dog2位置X[mm]
__CornerDogPosY2
= 17.5 -20.0 没有范围
否
需要
Coner Dog2位置Y[mm]
__CornerDogHeightOffset
= 9.0 31.5 没有范围
否
需要
从影像处理高度到Coner Dog1位置为止的高度[mm]
_______MACHINE_ORIGIN______ =
X_Stage1org = 412.1 436.5 没有范围
测定值
否
平台1原点 X [mm]
Y_Stage1org
= 8 7 没有范围
测定值
否
平台1原点 Y [mm]
X_Stage2org
= 422.9 557.5 没有范围
测定值
否
平台2原点 X [mm]
13/24
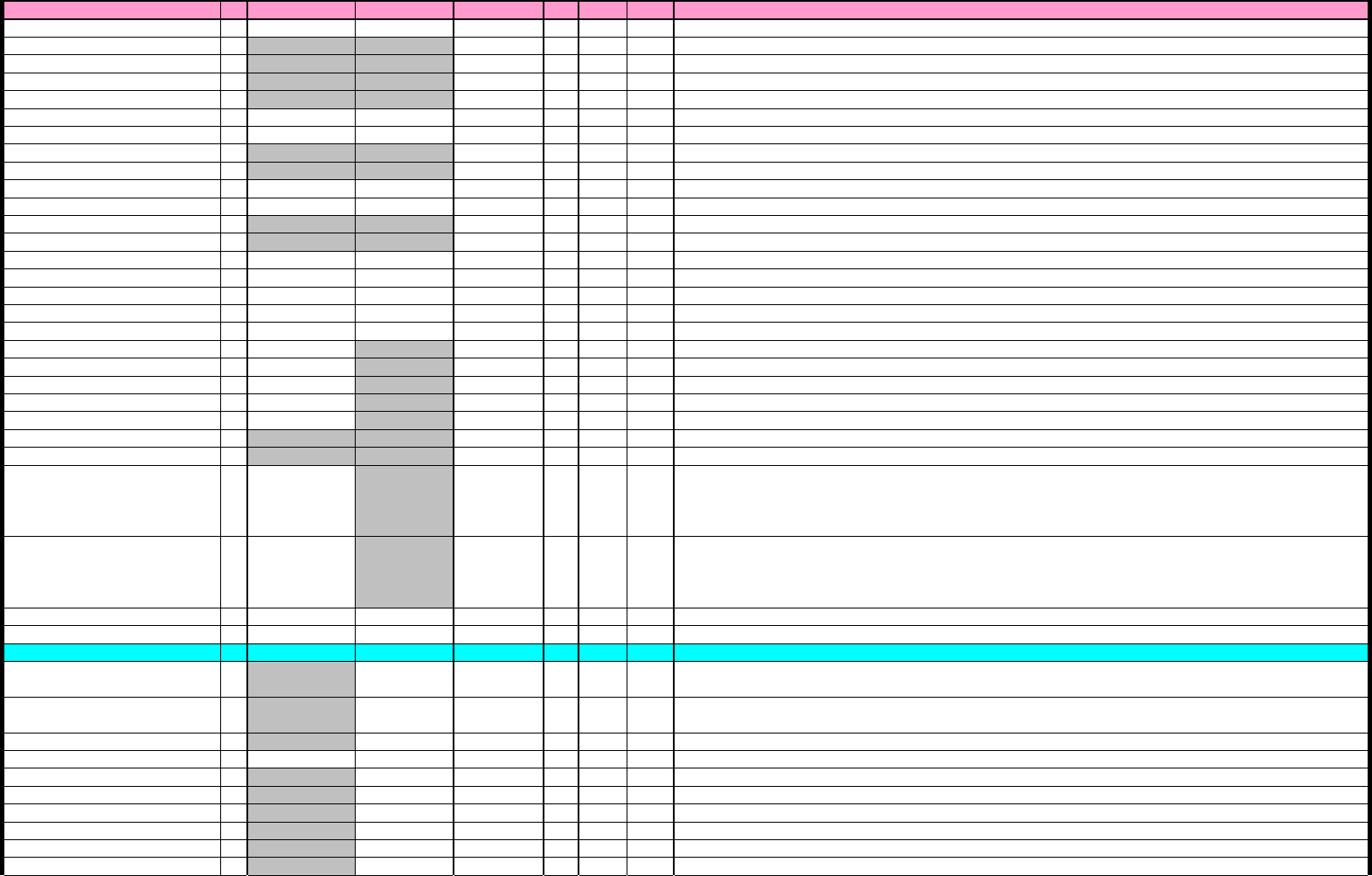
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
Y_Stage2org = 805 842 没有范围
测定值
否
平台2原点 Y [mm]
X_Stage3org = 0 0 没有范围
--- 否
平台3原点
Y_Stage3org
= 0 0 没有范围
--- 否
平台3原点
X_Stage4org
= 0 0 没有范围
--- 否
平台4原点
Y_Stage4org
= 0 0 没有范围
--- 否
平台4原点
Z_Stage1Surface
= 0.7 14.3 没有范围
测定值
否
平台1的原点(高度) [mm]
Z_Stage2Surface = 0.7 0.8 没有范围
测定值
否
平台2的原点(高度) [mm]
Z_Stage3Surface = 0 0 没有范围
--- 否
平台3的原点(高度)
Z_Stage4Surface
= 0 0 没有范围
--- 否
平台4的原点(高度)
__DevPitch1
= 16 20 没有范围
--- 否
料站间距(平台1) [mm]
__DevPitch2
= 16 20 没有范围
--- 否
料站间距(平台2) [mm]
__DevPitch3
= 0 0 没有范围
--- 否
料站间距(平台3) [mm]
__DevPitch4
= 0 0 没有范围
--- 否
料站间距(平台4) [mm]
X_BoardOrg
= 466.5 471.5 没有范围
测定值
否
电路板的原点X(计数值) [mm]
Y_BoardOrg = 236.25 242.3 没有范围
测定值
否
电路板的原点Y(计数值) [mm]
Z_BoardSurface = 0.7 1 没有范围
测定值
否
电路板上面的高度(计数值) [mm]
X_TableOrg = 5 10 没有范围
--- 否
机器待机时的料盘位置(计数值) [mm]
Y_TableOrg
= 400 350 没有范围
--- 否
机器待机时的料盘位置(计数值) [mm]
F_UpPoint
= 0 0 没有范围
测定值
否
F轴上升端(计数值) [mm]
F_DownPoint = -8.5 0 没有范围
测定值
否
F轴下降端(计数值) [mm]
G_UpPoint = 0 0 没有范围
测定值
否
G轴上昇端(计数值) [mm]
G_DownPoint = -8.5 0 没有范围
测定值
否
G轴下降端(计数值) [mm]
R_Pos1 = 0 0 没有范围
--- 否
XP141设定值 吸嘴1处于吸取位置时的旋转角度 [°]
Q_PosPick1
= 0 0 没有范围
--- 否
吸嘴1在吸取位置时的θ轴吸取位置 [°]。(基本不使用,所以在V1.10的固有值一览表中变更为未
Q_PosPlace1
= 0 0 没有范围
--- 否
吸嘴1在固有值__R_Pos1的位置时的θ轴贴装位置 [°]。(基本不使用,所以在V1.10的固有值一览
Z_DoubleMotionPoint
= 00
Z
_
B
oar
dS
ur
face+5.5~
Z_BoardSur
face+7.5
测定值
否
贴装时Z轴双运动动作的Z轴停止高度[mm]
Z_VaccumBreakPinPoint
= 00
Z
_
B
oar
dS
ur
face+9.4~
Z_BoardSur
face+11.4
测定值
否
压块最下段碰到真空破坏销时的Z轴高度[mm]
X_BoardExistCheckOrigin
= -10000 -10000 没有范围
测定值
否
电路板提升板检测原点X[mm]
Y_BoardExistCheckOrigin = -10000 -10000 没有范围
测定值
否
电路板提升板检测原点Y[mm]
______NOZZLE_POSITION______ =
X_NzlPosX1 = 0
9
根
:85.0
17根:75.5 没有范围
测定值
否
吸嘴置放台(1)X [mm]
Y_NzlPosY1
= 0
9
根
:789.5
17根:804.5 没有范围
测定值
否
吸嘴置放台(1)Y [mm]
Z_NzlPosZ1 = 0 0.7 没有范围
测定值
否
吸嘴置放台(1)Z [mm]
Z_NzlPosZH
= 15.6 52 没有范围
测定值
否
吸嘴抬起时的最大高度 [mm]
X_RemoverPos
= 0 110 没有范围
测定值
否
料盘排出用吸取器的X坐标 [mm]
Y_RemoverPos = 0 1093 没有范围
测定值
否
料盘排出用吸取器的Y坐标 [mm]
Z_RemoverPos
= 0 0 没有范围
测定值
否
料盘排出用吸取器的Z坐标 [mm]
__NzlPosOffsetX1
= 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(1)
__NzlPosOffsetY1
= 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(1)
__NzlPosOffsetX2
= 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(2)
14/24
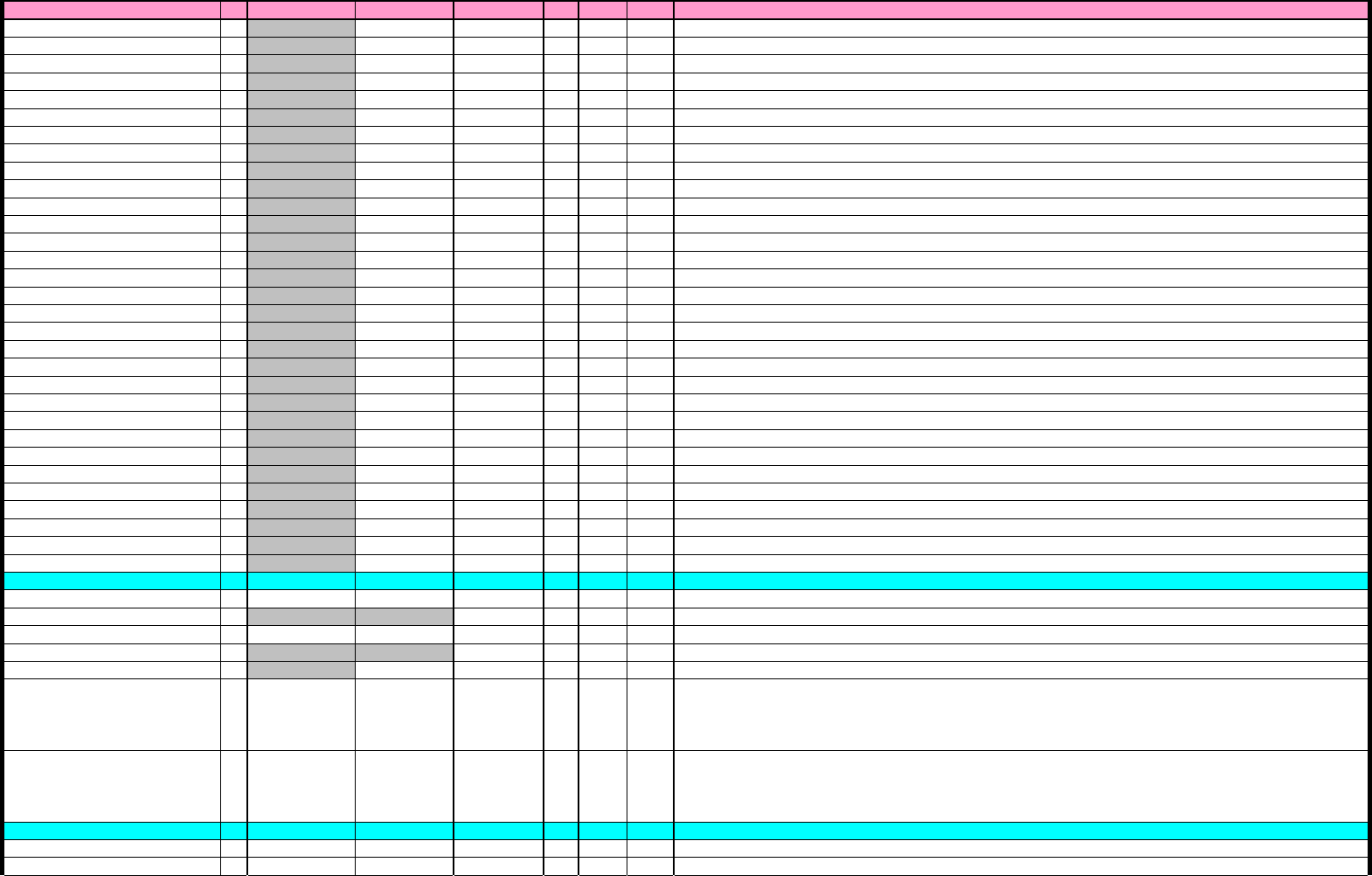
XP 固有値一覧 Type-III V1.51
2007-12-4現在
项目 XP-143E XP243E 输入范围
测定值
User编辑
重新接通电源
解说
__NzlPosOffsetY2 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(2)
__NzlPosOffsetX3 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(3)
__NzlPosOffsetY3 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(3)
__NzlPosOffsetX4 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(4)
__NzlPosOffsetY4 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(4)
__NzlPosOffsetX5 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(5)
__NzlPosOffsetY5 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(5)
__NzlPosOffsetX6 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(6)
__NzlPosOffsetY6 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(6)
__NzlPosOffsetX7 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(7)
__NzlPosOffsetY7 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(7)
__NzlPosOffsetX8 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(8)
__NzlPosOffsetY8 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(8)
__NzlPosOffsetX9 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(9)
__NzlPosOffsetY9 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(9)
__NzlPosOffsetX10 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(10)
__NzlPosOffsetY10 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(10)
__NzlPosOffsetX11 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(11)
__NzlPosOffsetY11 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(11)
__NzlPosOffsetX12 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(12)
__NzlPosOffsetY12 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(12)
__NzlPosOffsetX13 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(13)
__NzlPosOffsetY13 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(13)
__NzlPosOffsetX14 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(14)
__NzlPosOffsetY14 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(14)
__NzlPosOffsetX15 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(15)
__NzlPosOffsetY15 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(15)
__NzlPosOffsetX16 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(16)
__NzlPosOffsetY16 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(16)
__NzlPosOffsetX17 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移X(17)
__NzlPosOffsetY17 = 0 0 没有范围
测定值
否
吸嘴中心位置偏移Y(17)
______DISPOSE_POSITION_____ =
X_Disposal1 = 346.5 351.5 没有范围
测定值
否
废弃不良元件处(小型元件)(FD相机基准) [mm]
X_Disposal2 = 0 0 没有范围
测定值
否
XP341设定 不良元件(料盘)排出处 X [mm]
Y_Disposal1 = 202.4 206 没有范围
测定值
否
废弃不良元件处(小型元件)(FD相机基准) [mm]
Y_Disposal2 = 0 0 没有范围
测定值
否
XP341设定 不良元件(料盘)排出处 Y [mm]
Z_Disposal2 = 0 1 没有范围
测定值
否
废弃不良元件处(大型元件) [mm]
__BlowBoxDistanceX =
0
.
0
(无S
u
b
Box)
57.5(有Sub
Box)
0
.
0
(无S
u
b
Box)
57.5(有Sub
Box) 没有范围
--- 否
从元件废弃BOX中心开始到Blow BOX中心为止的距离X ※Blow BOX未安装时设定为“0.0”。
__BlowBoxDistanceY
=
0
.
0(无S
u
b
Box)
-5.0(有Sub
Box)
0
.
0(无S
u
b
Box)
-5.0(有Sub
Box) 没有范围
--- 否
从元件废弃BOX中心开始到Blow BOX中心为止的距离Y ※Blow BOX未安装时设定为“0.0”。
_______PRIZM_POSITION______ =
__PrismFront = 136.5 147 没有范围
测定值
否
Side1侧相机影像取入位置 [mm]
__PrismBack
= 676.5 687 没有范围
测定值
否
Side2侧相机影像取入位置 [mm]
15/24