3OM-1434-003_w.pdf - 第278页
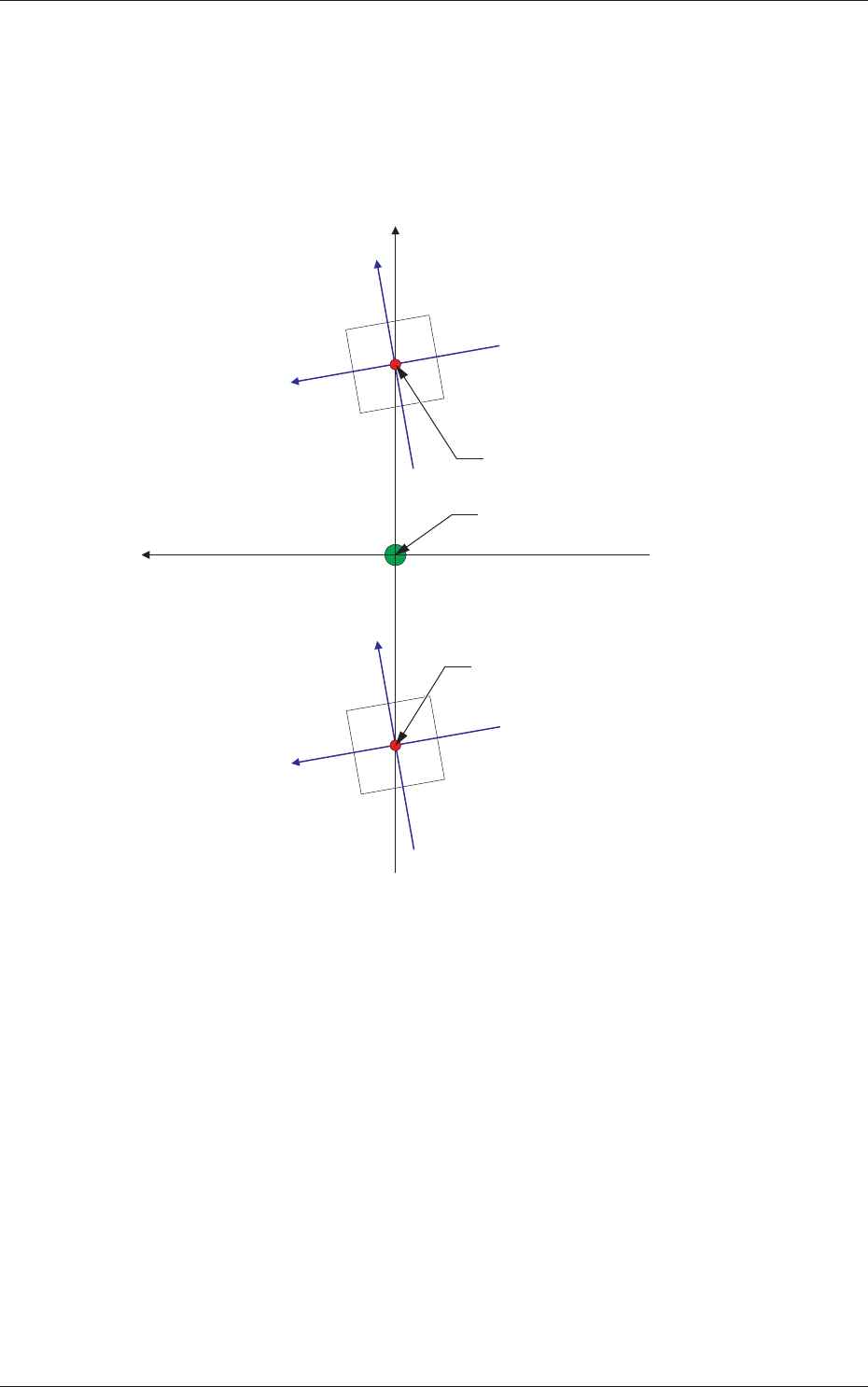
6 - 46 0710 - 001 2.1 补正值数据 在各照相机设定以下补正值。 [1] 元件识别照相机 X( 横 )、Y( 纵 )[mm] 调整对装置基准坐标系原点到元件识别照相机中心的设计尺寸的 位置偏离。 Xm(+) Ym (+) Xc(+) Yc(+) Xc(+) Yc(+) Fig.3F39 Xm-Ym: 装置基准坐标系 Xc-Yc: 元件识别照相机坐标系 元件识别照相机中心 Pm. 装置基准坐标原点 元件识别照相机中心
6-450805-002
2.1 补正值数据
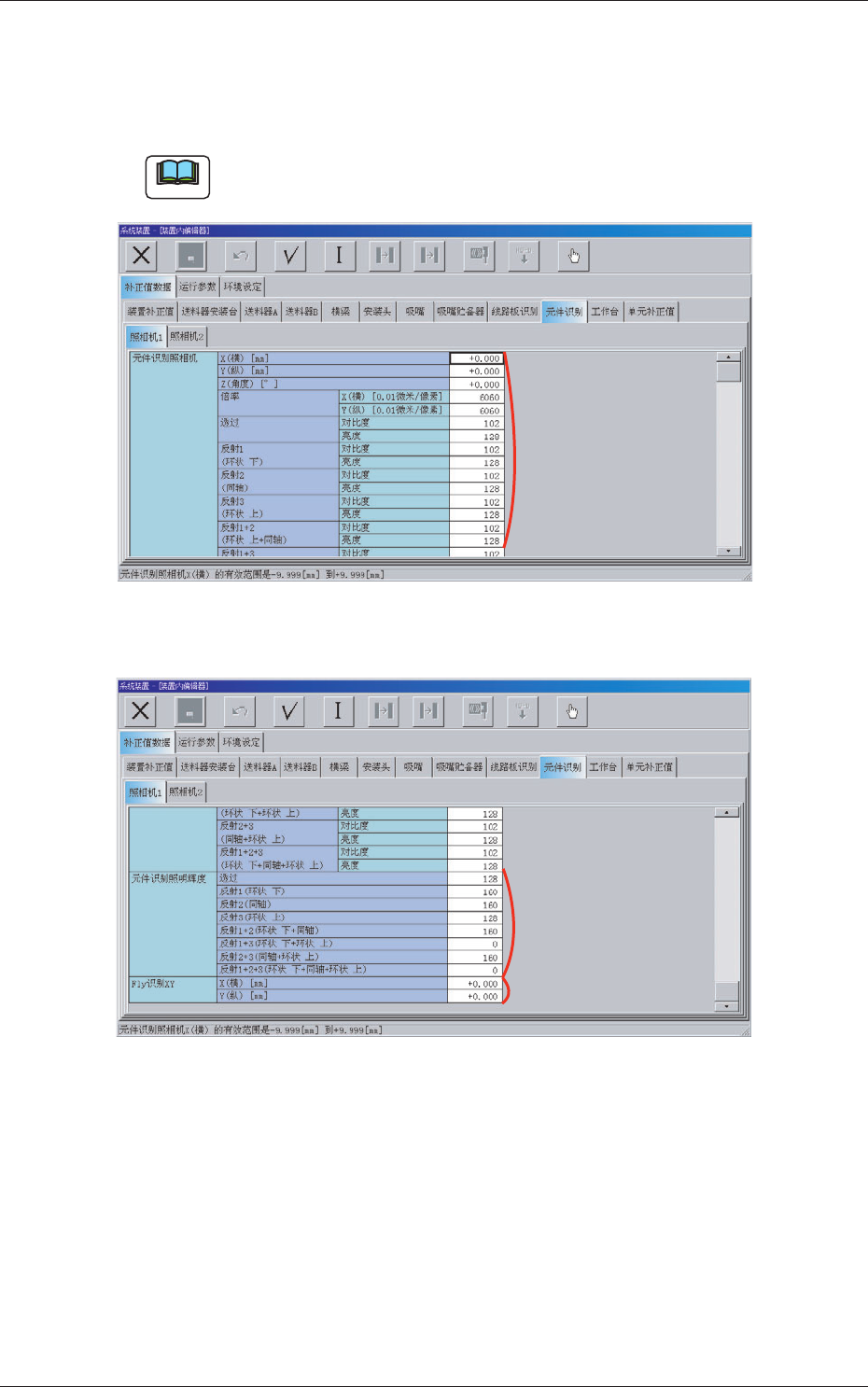
2.1.26 元件识别补正值
在
“
补正值数据
”
选项卡中,按 [ 元件识别 ]Tab,再按 [ 照相机 1]Tab,
即可显示以下选项卡。
Note
[ 照相机 2] 也显示相同界面。
Fig.3F38-1
“
元件识别照相机 1
”
选项卡 (1)
Fig.3F38-2
“
元件识别照相机 1
”
选项卡 (2)
[1]
[2]
[3]
6-460710-001
2.1 补正值数据
在各照相机设定以下补正值。
[1] 元件识别照相机
X( 横 )、Y( 纵 )[mm]
调整对装置基准坐标系原点到元件识别照相机中心的设计尺寸的
位置偏离。
Xm(+)
Ym (+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Fig.3F39
Xm-Ym: 装置基准坐标系
Xc-Yc: 元件识别照相机坐标系
元件识别照相机中心
Pm. 装置基准坐标原点
元件识别照相机中心
6-470710-001
2.1 补正值数据
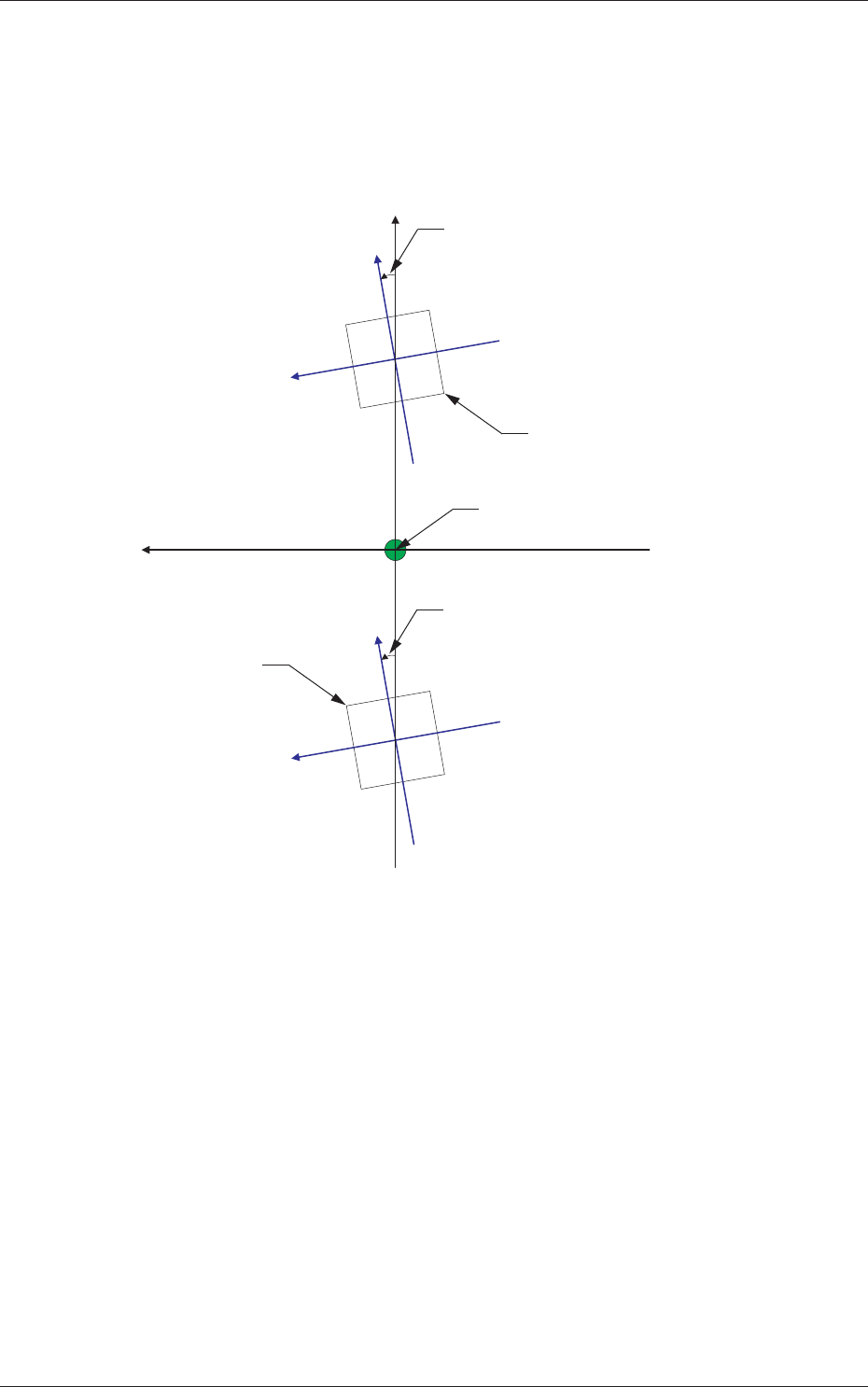
Z( 角度 )[
°
]
设定对装置基准 XY 坐标 (Xm-Ym 坐标 ) 的元件识别照相机扫描坐
标的角度偏离。
以装置基准 XY 坐标系为基准,元件识别照相机扫描坐标往逆时针
方向倾斜时,补正值数据的符号为
“
+
”
。
Xm(+)
Ym(+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Fig.3F40
倍率 X( 横 )、Y( 纵 )[0.01 微米 / 像素 ]
是设定元件识别照相机倍率的数据,用来设定 1 像素相当于多少
微米。
该补正值在倍率测定用治具的教示操作下自动被算出。
•
初始值 :6060
Xm-Ym: 装置基准坐标系
Xc-Yc: 元件识别照相机坐标系
元件识别照相机中心
Pm. 装置基准坐标原点
元件识别照相机角度
元件识别照相机角度
元件识别照相机