xp243 系统手册 - 第218页
4. 机器生产程序 SYS-XP243-2.2S 206 XP-242E/243E 系统手册 4. 用 [ 指 教 ] 画面 右侧的 [No.Jump] 按键选择顺序 No.。 5 . 输 入[指 教]画 面 上 的 项 目 。 6. 由 JOG 操作,将要注册的主体与 相机影像中心吻合。 备注 ) 不能收入相机的视野时,进行多点输入。 (详细请参考多点输入) 7 . 在[指 教]画 面 右 侧 选 择[覆 盖]或 者[插 入]后 , …
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 205
指教功能
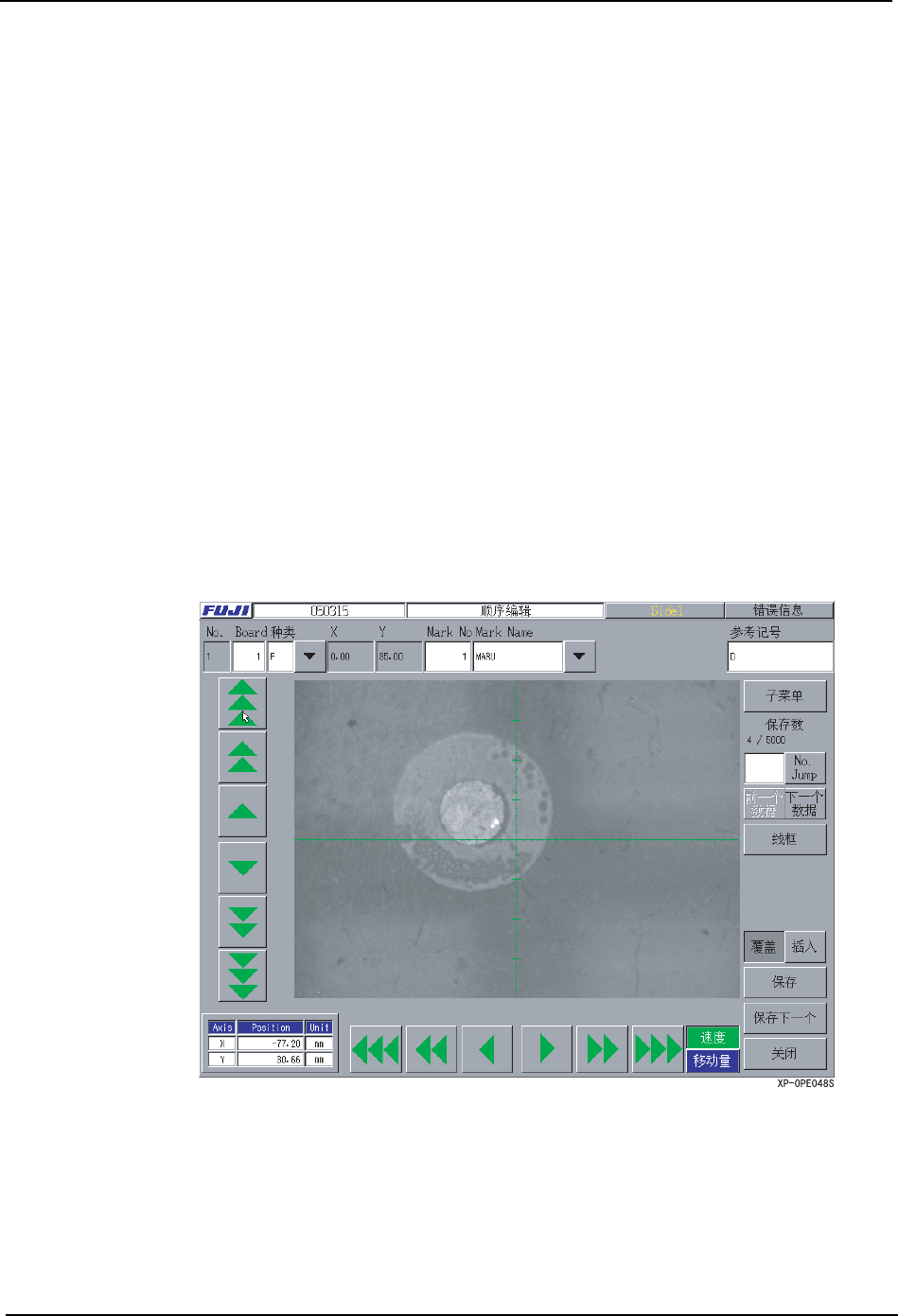
在 [ 顺序 ] 画面上按下 [ 指教 ] 按键后,定位点取入影像显示在触摸屏上。指教是移动机器
的伺服轴后注册顺序的坐标位置的功能。这里的注册是指顺序数据的 X,Y 坐标上覆盖或者插
入实际的电路板上的坐标。注册的坐标从机器上的 X,Y 坐标变换成实际电路板上的 X,Y 坐
标,所有的基准定位点以基准进行补正。
注意 ) 1. 为了使用指教功能,使用前有必要进行电路板的设定。
2. 推荐预先设定基准定位点。用指教注册的坐标是以基准定位点为基准补正的坐标,所以重新
编辑定位点数据的位置中心有偏差时注册的坐标也有偏差。
取得的坐标修正值,进行以下的操作后重新进行基准定位点数据的读取。
·电路板的松开
·机器的启动
·程序的读取
·[ 程序 ][ 顺序 ] 画面结束时,选择 [ 不保存结束 ]。
·编辑基准定位点读取顺序
·编辑基准定位点数据
现有的顺序数据的确认。
在此用使用现有的顺序数据为例进行说明。
操作步骤
1. 在 [ 主画面 ] 上选择 [ 程序 ]、[ 选择编辑程序 ],显示出程序。
2. 选择 [ 编辑 ],按下画面下 [ 顺序 ] 按键,显示出 [ 编辑顺序 ] 画面。
3. 按下[顺序]画面右侧的[指教]按键,显示出[指教]画面。
4. 机器生产程序 SYS-XP243-2.2S
206 XP-242E/243E 系统手册
4. 用 [ 指教 ] 画面右侧的 [No.Jump] 按键选择顺序 No.。
5. 输入[指教]画面上的项目。
6. 由 JOG 操作,将要注册的主体与相机影像中心吻合。
备注 ) 不能收入相机的视野时,进行多点输入。(详细请参考多点输入)
7. 在[指教]画面右侧选择[覆盖]或者[插入]后,按下[注册]按键。
备注 ) 按下 [ 注册 ] 按键时,有未读的基准定位点读取顺序时,显示出确认读取开始的画面。
操作按键说明
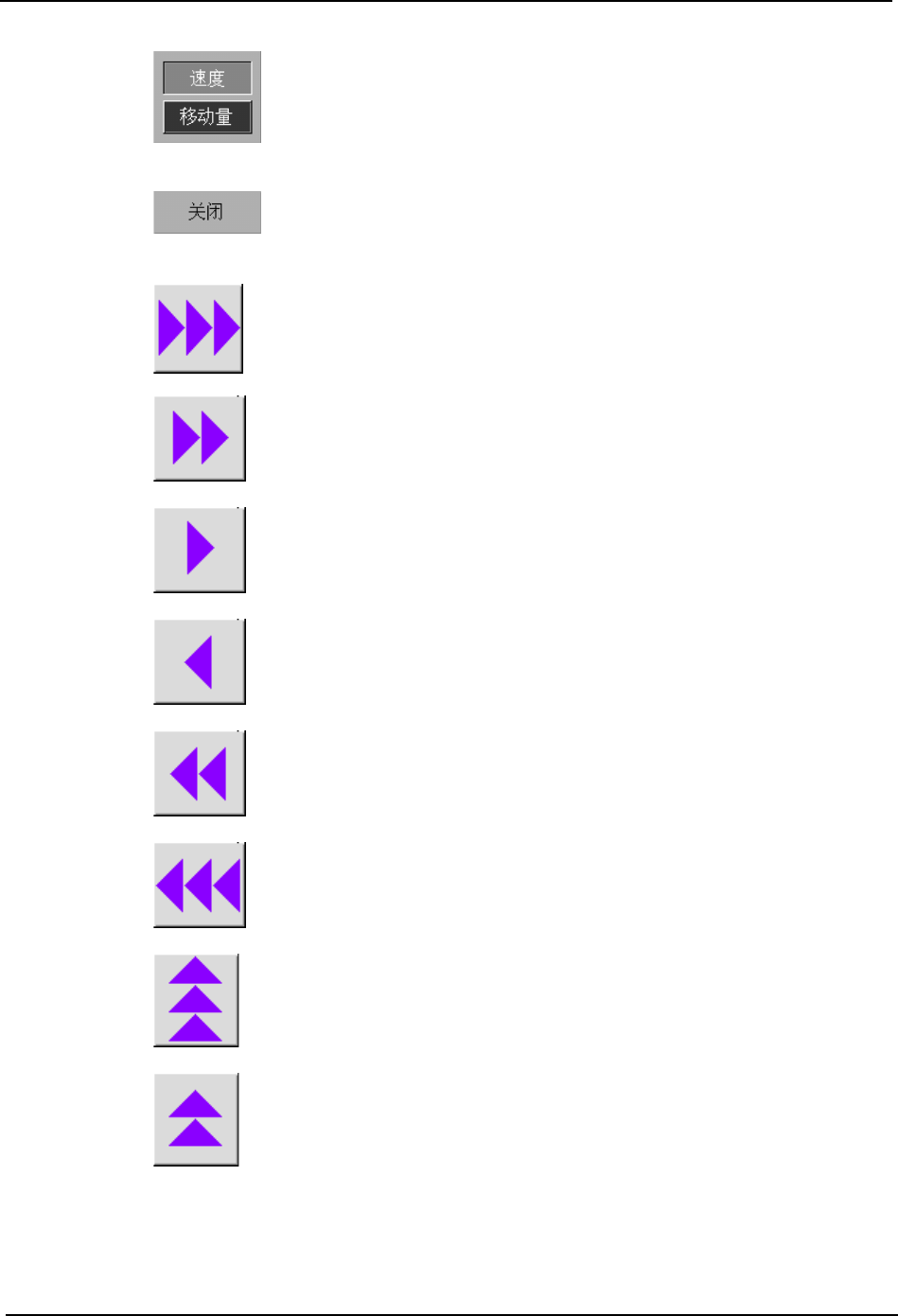
当移动方法设定为 [ 速度 ] 时,距离十字中心越远 X、Y 轴的移动速
度越快。需要低速移动时,请点击中心附近位置。在选择画面期
间,轴随之移动。移动方法是在 [ 移动量 ] 中设定时,使所选择部
分的影像坐标尽量位于十字中心来移动 X、Y 轴。
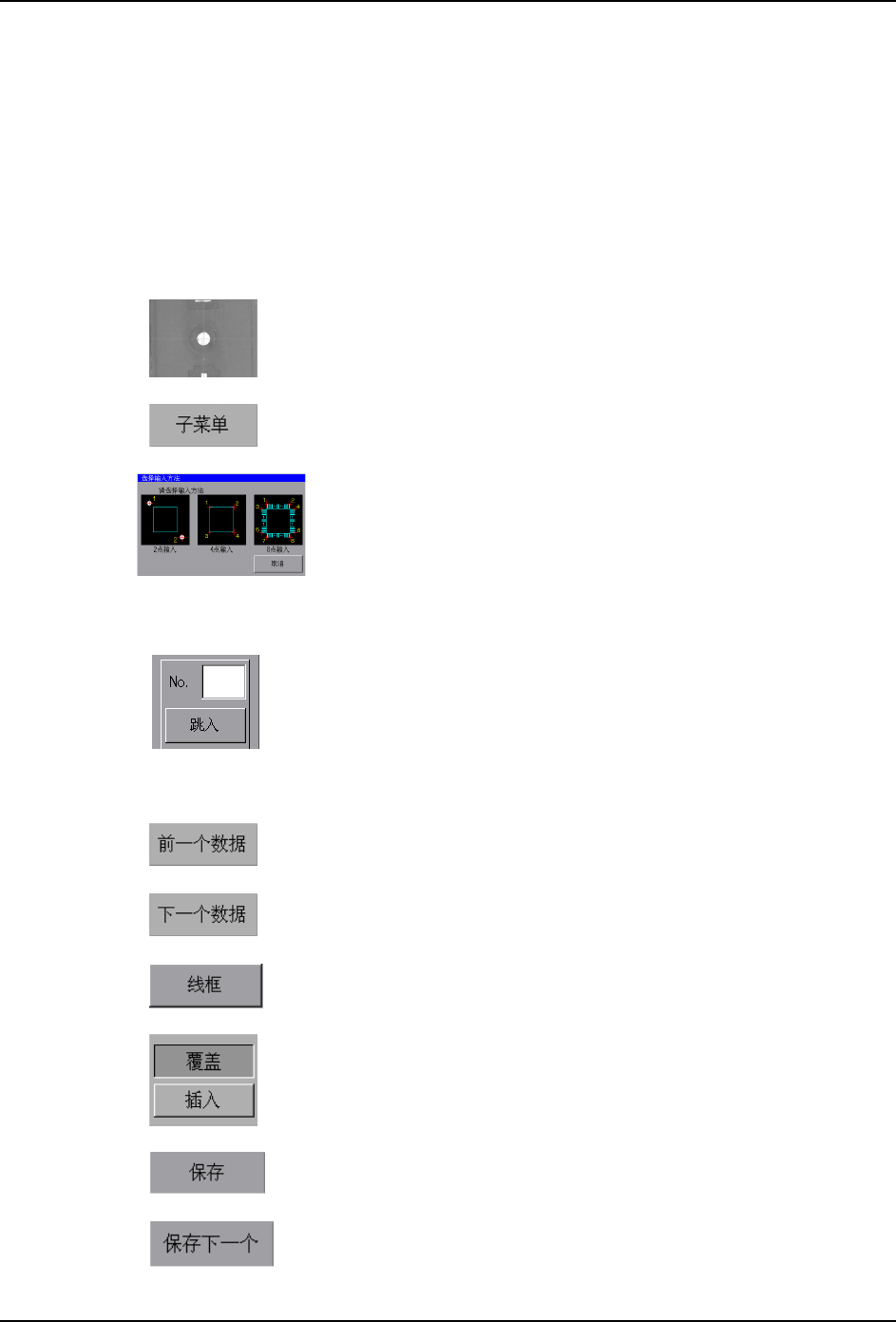
显示子菜单。
当要指定比相机的视角更大的元件的 X、Y 的坐标、角度时,使用多
点输入功能。
选择 [ 多点输入 ] 后显示多点输入的选择画面。选择要输入的点数
的图,一点一点输入坐标。
图形编辑
在 [ 指教 ] 画面上,显示出可以注册的定位点的 [ 图形编辑 ] 画
面。
在 [No.] 中输入号码,选择 [ 跳过 ] 后可以更改所编辑的顺序号
码。
可以编辑当前顺序 No. 之前的数据。长按后可以连续移动到前面的
数值。放开按键或者移动到最前的顺序时停止。
可以编辑当前顺序 No. 之前的数据。长按后可以连续移动到前面的
数值。放开按键或者移动到最前的顺序时停止。
表示对象物的线框。
选择指教操作的编辑方法。
[ 覆盖 ]: 新输入的数据会覆盖所有已注册的数据。 [ 插入 ]:将新
建数据插入到指定的顺序号中。
根据 「覆盖」、「插入」的设定,对于当前的顺序注册坐标。
根据 「覆盖」、「插入」的设定,对于下一个的顺序注册坐标。
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 207
设定 X,Y 轴的 JOG 操作模式。更改设定后,箭头颜色和 JOG 操作模
式也变更。
在移动量 ( 兰色 ) 时,每按一次下面的按键就以此移动量进行移
动。
在速度 ( 绿色 ) 时,在按下面的箭头键的期间,将以此速度移动。
不注册任何数据结束指教操作。
蓝色:以高速将 X 轴向正向移动。
绿色:以移动量为 1mm 将 X 轴向正向移动。
蓝色:以中速将 X 轴向正向移动。
绿色:以移动量为0.1mm将X轴向正向移动。
蓝色:以低速将 X 轴向正向移动。
绿色:以移动量为 0.01mm 将 X 轴向正向移动。
蓝色:以低速将 X 轴向负向移动。
绿色:以移动量为 0.01mm 将 X 轴向负向移动。
蓝色:以中速将 X 轴向负向移动。
绿色:以移动量为0.1mm将X轴向负向移动。
蓝色:以高速将 X 轴向负向移动。
绿色:以移动量为 1mm 将 X 轴向负向移动。
蓝色:以高速将 Y 轴向正向移动。
绿色:以移动量为 1mm 将 Y 轴向正向移动。
蓝色:以中速将 Y 轴向正向移动。
绿色:以移动量为0.1mm将Y轴向正向移动