xp243 系统手册 - 第225页
SYS-XP243-2.2S 4. 机器生产程序 XP-242E/243E 系统手册 213 电路板缺口长度 XL (XP-243E) 电路板的搬运轨道基准侧 (平台 No.1 侧) 有缺口时, 设定从左侧面开始的长度。 (0.0 ~, 100.0mm) 备注 ) 缺口不连续的时候,设定为从左侧面开始没有缺口的部分的长度到 20mm 以上为止的长度。此 时, 电路板的间隙在 5mm 以下的对象作为连续的 电路板进行识别, 请将 5mm …

4. 机器生产程序 SYS-XP243-2.2S
212 XP-242E/243E 系统手册
以顺序输入的坐标的基准点与FUJI的程序坐标原点 ( 从电路板右下角开始在X 方向为-5mm、
Y 方向为 +5mm 的坐标 ) 不同时,有必要输入修正值。请输入从电路板上 FUJI 的原点到输入
坐标数据的基准点的 Y 方向的修正值。(-600.00mm ~ 600.00mm)
电路板 X
设定电路板的 X 方向尺寸。(80.00mm ~ 457.00mm)
电路板 Y
设定电路板的 Y 方向尺寸。(50.00mm ~ 356.00mm)
销距
输入基准孔(销)和从属孔(销)之间的距离。(0.0~457.0)
生产块数
只生产在此指定的生产块数。输入 0 后生产预定数 ( 动作模式选择画面 ) 变为有效。(0 ~
65000)
通过模式
设定通过模式运转。电路板仅仅通过机器,只作为单纯的搬运轨道而动作。
Program Polarity
设定是否使用基准化程序手法 (Polarity 功能 )。
详细情况请参考 [Polarity 功能 ]。
定位点的错误识别检查范围
设定各个定位点的错误识别检查范围的公差。(0.0 ~ 10.0)
设定值是 0.0 时,不进行偏差量的检查。
定位点间距偏差的公差范围
设定定位点间距偏差的公差范围。(0.0 ~ 10.0)
设定值是 0.0 时,不进行偏差量的检查。
注意 ) 用焊接基准定位点进行生产时,有时会错误识别定位点进行贴装,请务必在「定位点误识别检
查区域」「定位点间间距偏差的公差」的参数中输入数值。
真空支撑板名称 ( 当前不支持。)
输入真空支撑板名称。
软着陆速度
用 % 来指定 Z 轴的动作速度。(0.0% ~ 10.0%)
例 ) 速度 =75[mm/sec] ×设定值 /10
0: No Pass不通过
1: Pass通过
0: No 不使用 ( 当前不支持。如果设定的话,会出错而不能开始生产。)
1: Yes使用
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 213
电路板缺口长度 XL (XP-243E)
电路板的搬运轨道基准侧(平台 No.1 侧)有缺口时,设定从左侧面开始的长度。(0.0 ~,
100.0mm)
备注 ) 缺口不连续的时候,设定为从左侧面开始没有缺口的部分的长度到 20mm 以上为止的长度。此
时,电路板的间隙在 5mm 以下的对象作为连续的电路板进行识别,请将 5mm 以下的电路板作为
连续的电路板进行计算。
注意 ) 1. 被动轨道侧 (平台 N0.2 侧)上请不要设定缺口数据。
2. 缺口长度在电路板尺寸的一半以上时不能生产。
3. 没有缺口的长度不满 20mm 的电路板不能生产。
电路板缺口长度 XL (XP-243E)
电路板的搬运轨道基准侧 (平台 No.1 侧)有缺口时,设定从右侧面开始的长度。(0.0 ~
100.0mm)
备注 ) 缺口不连续的时候,设定为从右侧面开始没有缺口的部分的长度到 20mm 以上为止的长度。此
时,电路板的间隙在 5mm 以下的对象作为连续的电路板进行识别,请将 5mm 以下的电路板作为
连续的电路板进行计算。
注意 ) 1. 被动轨道侧 (平台 N0.2 侧)上请不要设定缺口数据。
2. 缺口长度在电路板尺寸的一半以上时不能生产。
3. 没有缺口的长度不满 20mm 的电路板不能生产。
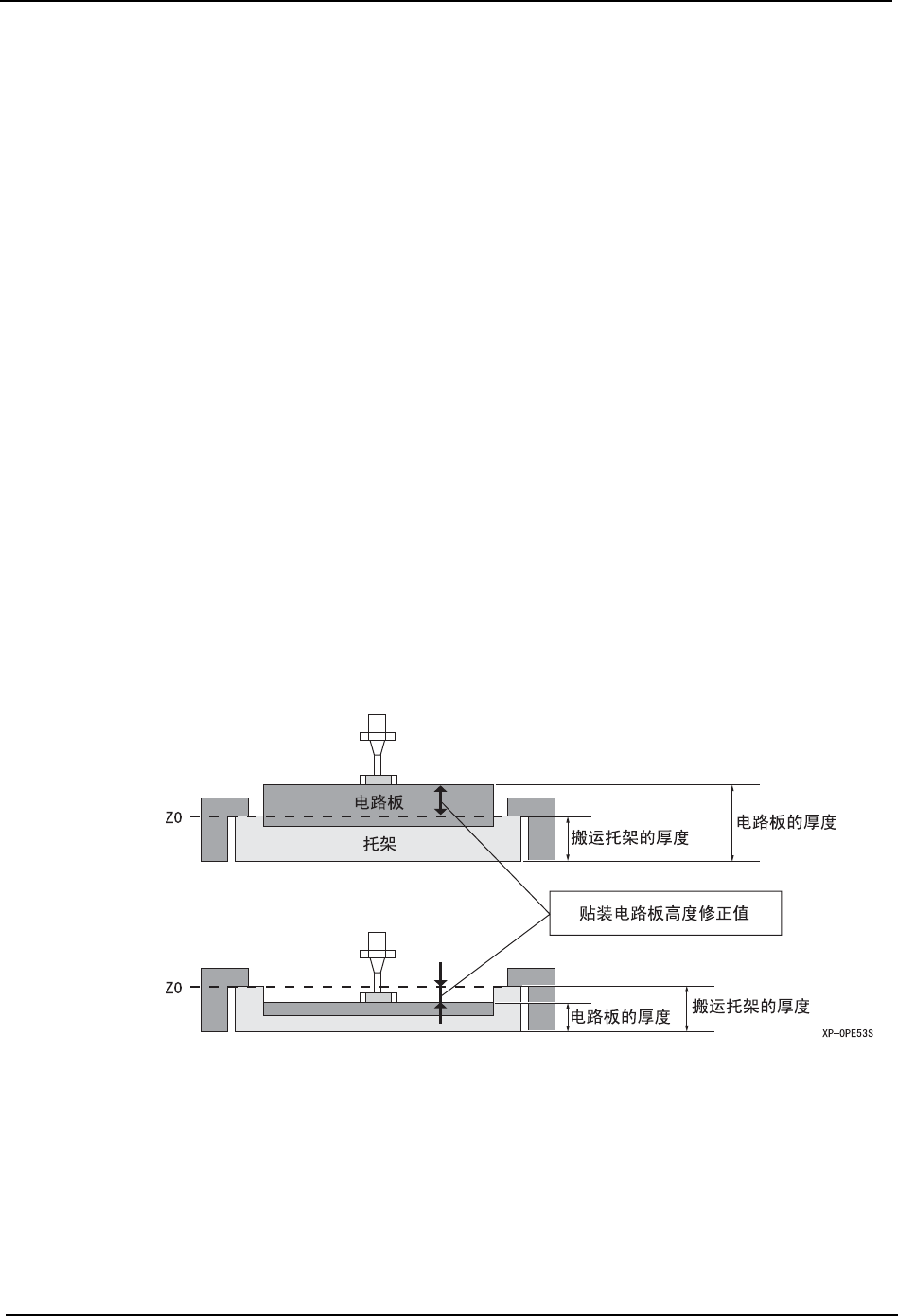
电路板的厚度
使用搬运托架时,输入从搬运托架下面到贴装电路板上面的数值。(0.0 ~ 4.00mm)
贴装基准高度修正
使用搬运轨道托架时,在设定电路板的厚度和托架的厚度时,如图所示,电路板上面比
Z0(Z_BoardSurface: 固有值的电路板高度的原点 mm) 高或者低的时候,输入贴装高度的修
正量,将基准与电路板上面相吻合。电路板厚度和搬运托架厚度中的某一个设定为 0.0 时,
此功能无效。
反面贴装结束的元件高度
在反面已经贴装有元件的电路板时,输入反面贴装结束的元件的最大高度。(0.00 ~
25.40mm)
输入 0.00 的时候作为 25.40。反面没有贴装元件时,输入 0.01 后搬运周期时间被缩短。
4. 机器生产程序 SYS-XP243-2.2S
214 XP-242E/243E 系统手册
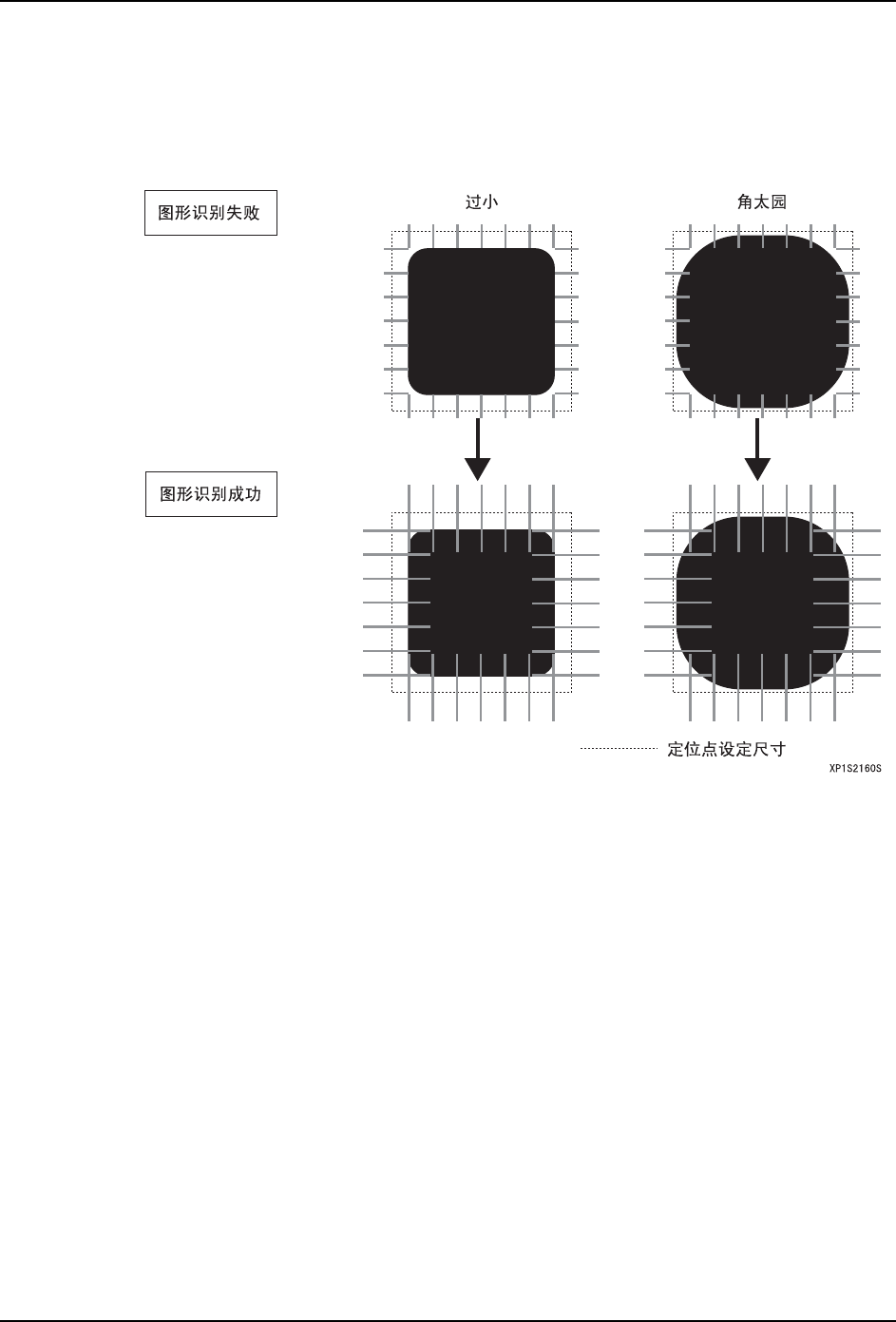
焊锡水平定位点
如下图所示焊锡水平定位点的基准定位点比设定的定位点尺寸看上去要小、角成园形时,有
可能识别类型失败。在生产程序内的电路板设定上,将焊锡水平定位点设定为 (1:YES) 后,
在通常的影像失败时,改变查找线长度进行影像处理。由此可以成功地检测出轮廓线并识别
类型。但是,尺寸太小时或者太大时不能识别类型。
注意 ) 使用本功能时,有时会误识别定位点而贴装,请务必在生产程序的电路板的「定位点误识别检
查区域」、「定位点间距偏差容许误差」中输入任意的数值。