xp243 系统手册 - 第255页
SYS-XP243-2.2S 4. 机器生产程序 XP-242E/243E 系统手册 243 机器侧的补件模式设定为自动补 件时,以在此设定的补件次数进行补 件。(0 ~ 255) 注意 ) 在机器上设定的补件次数仅在元件数据中没有设定补件次数时有效。 Part Dump Position 对因影像处理错误而排出元件的 地方的设定。 FujiFlexa 的外形编辑 (Dump Posi tion)的各个数值 的名称不同。 请参考下述的对…

4. 机器生产程序 SYS-XP243-2.2S
242 XP-242E/243E 系统手册
Placing Offset Y
以 Direction 为 0 并且贴装角度为 0°作为基准设定 Y 方向的贴装修正量。(-100.00mm ~
100.00mm)
Placing Offset Z
设定贴装时将元件压在电路板上时的冲程量。(-20.00mm ~ 20.00mm)
以 0 输入时仅压下 0.3mm。
Placing Mode
指定移向元件贴装坐标时各伺服轴的到达精度。当选择重视贴装速度时选 2,重视贴装精度
时选 1。
Slow Place Speed
设定从吸取到贴装过程中 Z 轴上升和下降的速度。(0% ~ 100%)
减轻吸取或贴装时对元件的冲击。值越小速度越慢。输入 0 时,机器判断为 100。吸取时取
这个值和 Soft Pick Speed 两者中较慢的数据为有效值。吸取元件期间、Part Transport
Speed 也需考虑,取这些数据中最慢的速度为有效值。贴装时这个值和 Soft Place Speed
中较慢的速度进入有效状态。吸取元件期间、Part Transport Speed 也需考虑,取这些数
据中最慢的速度为有效值。
Soft Place Speed
设定贴装时 Z 轴下降和上升的速度。(0.0 ~ 10.0)
减轻贴装时对元件的冲击。值越小速度越慢。输入 0 时,机器判断为 10.0。贴装时取这个
值和 Slow Place Speed 两者中较慢的数据为有效值。吸取元件期间、Part Transport Speed
也需考虑,取这些数据中最慢的速度为有效值。
Alt. Feeder Trigger
生产程序中的供料器安装中设定了次料粘时,设定在什么条件下移动至次料站。
供料器元件的时候
这个设定可通过固有值文件的项目 “__ DchangeTrigger”来选择。选择 3 时,元件数据在
Alt. Feeder Trigger 中的设定值进入有效状态。这时从以下选项中选择适当的条件。
注意 ) 如果所有补件次数都为吸取错误时,机器判断为料尽,此时 1:No Part、2:Miss 为相同动作。
料盘元件的时候
无论固有值 “__ DchangeTriger”和元件数据 Alt. Feed Trigger 中设定为何值,只要机
器判断为料盘料尽时,就移至次料站。
Recovery Times
Standard:0 Vision Type 不到 100 时,以低精度模式进行贴装。Vision Type 在
100 以上时,以高精度模式进行贴装。
Fine-Slow:1 以高精度模式进行贴装。
Fine-Fast:2 以低精度模式进行贴装。
0: Error:料尽、吸取错误、影像处理错误
1: No Part:料尽、吸取错误
2: Miss:料尽、吸取错误
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 243
机器侧的补件模式设定为自动补件时,以在此设定的补件次数进行补件。(0 ~ 255)
注意 ) 在机器上设定的补件次数仅在元件数据中没有设定补件次数时有效。
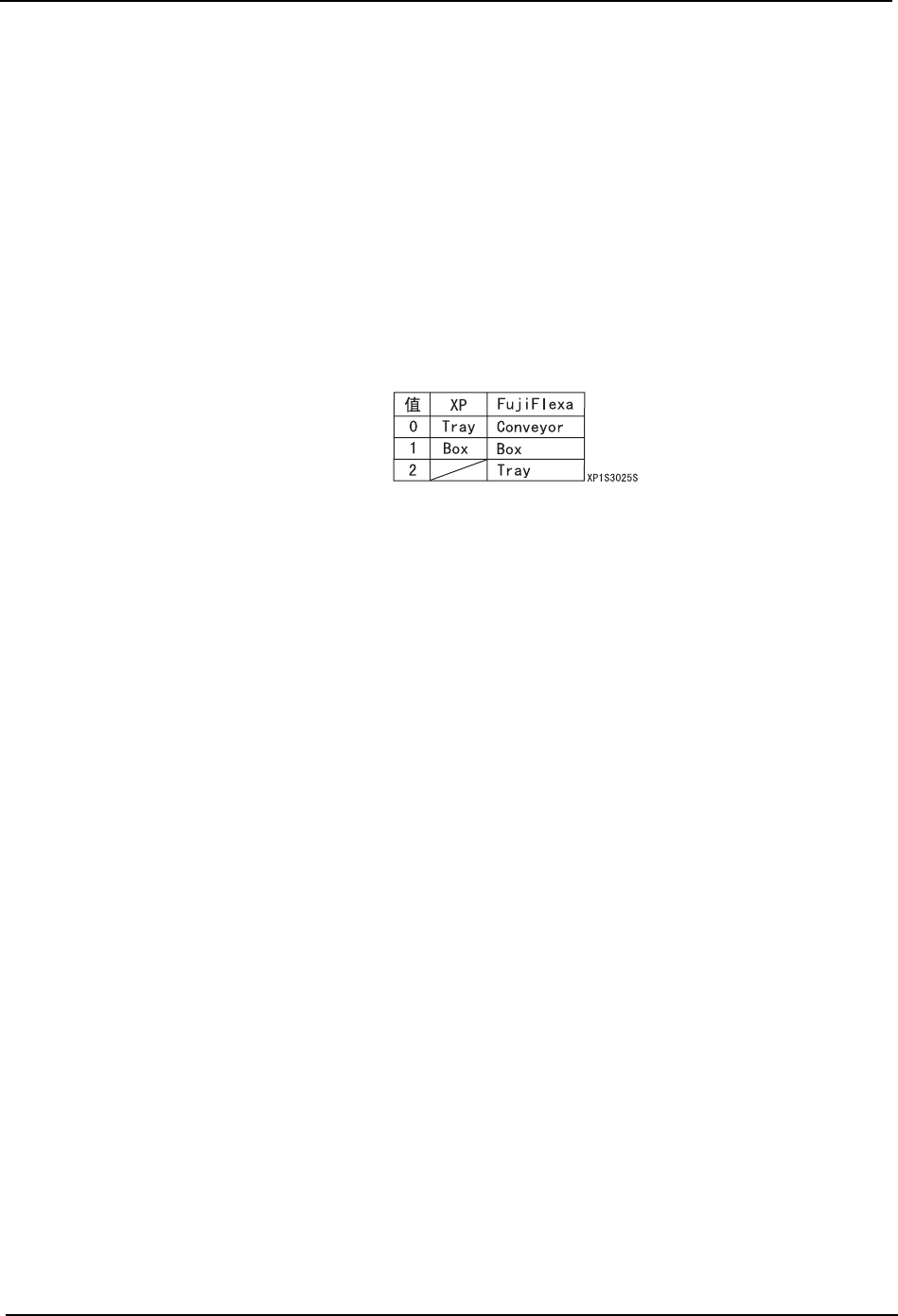
Part Dump Position
对因影像处理错误而排出元件的地方的设定。
FujiFlexa 的外形编辑 (Dump Position)的各个数值的名称不同。
请参考下述的对照表。
Box: 将不良元件废弃到搬运轨道旁边的不良元件排出箱。
Tray: 自动辨别后,将不良元件废弃到吸嘴置放台旁边的大型不良元件排放盘或是搬
运轨道旁边的中型不良元件排放盘。元件外形尺寸 X、Y 都在 20.0mm 以下时放
进中型不良元件排出盘,X、Y 的其中一项超过 20.0mm 时则放进大型不良元件
排放盘。

4. 机器生产程序 SYS-XP243-2.2S
244 XP-242E/243E 系统手册
·Vision/Coplanarity
Vision Type
将元件形状作为 Vision Type 从以下进行选择。显示出数据的设定条件,但不意味着影像处
理能力,保证范围。
注意 ) Vision Type 不是 18 时、即使对象元件的影像由自动生成的模板进行处理、也不可能完全不发
生错误,发生错误时,选择 Vision Type18,然后请参考 MSA 影像处理说明书或本手册第 4 部
“影像处理”,创建模板文件,确认影像处理是否正常后,再进行元件的贴装。
Camera Position
选择用于元件的影像摄入的相机。
Parts Lighting
选择对元件进行影像处理时使用的照明灯。
10: 角芯片 ( 对象尺寸∶ 0603 ~ 4532)
18: XP 的其他设定 (10、20、100、124、130、180、230 以外均为此值 )
19: 根据 Vision Type18 的定位 + 引脚或者锡球进行识别处理
20: Mini Mode 系列 (1 个要素不属于此范畴,最大引脚数 / 要素:16)
100: QFP&CONNECTOR ( 指引脚间距最小为 0.3mm,至少包含 1 个由 5 根以上引
脚构成的要素的元件。最大引脚数 / 要素数 :128,最大要素数 :128)
124: J 引脚元件
130: 黑色主体 BGA ( 用 MSA 方式来描述要素 ),新建作成时请使用 Vision
Type 230
180: 铝电解电容
230: 黑色主体 BGA ( 用 SMD3 方式来描述要素 )( 指至少具有 1 个由 2 个以上
焊锡凸点构成的要素、至少包含 12 个焊锡凸点的元件。最大焊锡凸点数
/ 要素 :128、最大要素数 :128)
231: 白色主体 BGA ( 用 SMD3 方式来描述要素 )
Auto: 使用元件供应平台附近的相机。在平台 1 吸取时使用 Side1 的相机、在
平台 2 吸取时使用 Side2 的相机。
Front: 使用 Side1 的相机。
Rear: 使用 Side2 的相机。
Automatic: 元件数据的 Vision Type 被设定为 130、230、231 的元件 :Sidelight
其他 Vision Type 元件数据的元件 :Frontlight
Frontlight: 使用 Frontlight。
Sidelight: 使用 Sidelight。