2500_Users_Manual - 第167页
Preventi ve Mai nten ance ProM aster 25 00 User Manua l 5-13 The Controller Boa rd The components of the controller board are listed below. • LEDs — Use d for a quick visual check on the status of vario us power supplies…

Preventive Maintenance
5-12 ProMaster 2500 User Manual
High Air Pressure
High pressure air is routed from the high pressure regulator to a Y
connection and is divided into beam high pressure and programming
module clamp assembly air pressure.
Beam
The beam high pressure air is routed to the beam by a black air line that
passes through the beam and into a straight-in air fitting on the back right
side of the beam. This air passes two milled-in air caps (cavities), which
dampen air spikes, and goes to solenoids
6
and
7
, mounted to the left
center of the beam.
Creating the Beam Vacuum
The beam vacuum required to hold a device on the chuck is created when
solenoid
7
(vacuum) is activated. The high pressure air passes through
the beam passes through the top hole of the vacuum venturi, and escapes
through holes in the bottom of the beam. As this rush of air passes the
venturi, it creates a vacuum at the chuck tip. During the optics test, the
vacuum value should fluctuate between about 26 (when no device is on
the chuck) and 172, with a value of 140 minimum for proper vacuum.
The vacuum is sensed by the vacuum sensor (mounted at the left front of
the beam). When a predefined vacuum level is detected by a device
blocking the chuck tip, the 2500 assumes that the beam has picked up a
device. A malfunction of the vacuum generator, the vacuum sensor, or
the microswitch can cause an error message on the 2500’s display stating
that the beam has dropped the device or is unable to pick up the device.
Inserting a Device into the Module
Low pressure air lowers the beam to the programming module contacts.
Additional force is required to insert the device into the programming
module. Insertion begins when the high pressure air present at hole 4 is
switched to hole 5 by beam solenoid 6 (high pressure). This high pressure
passes to hole 21, pushing the ball bearing down and sealing off the low
pressure of hole 19. This allows high pressure to pass to hole 20 and enter
the bottom of the cylinder at hole 18. Air pushing against the fixed piston
pushes the beam down to establish the required continuity between the
devices leads and the module’s contacts.
Programming Module
Clamp Assembly
Programming module clamp assembly air is switched by solenoid
8
to
either open the clamps (to remove a module) or close the clamps (to hold
a module in place). Red air lines carry air to close the clamps; blue air
lines carry air to open the clamps. In-line valves on these lines control the
amount of air entering the air cylinders and allow adjustment so each
side of the clamp opens and closes at the same rate. The in-line valves for
the red lines are in the middle of the air lines, while the valves for the blue
lines are at the base of each air cylinder.

Preventive Maintenance
ProMaster 2500 User Manual 5-13
The Controller Board
The components of the controller board are listed below.
•
LEDs
—Used for a quick visual check on the status of various power
supplies, solenoids, and certain logic signals.
•
Connectors
— Route control signals to optics, microswitch, motors,
solenoids, and other components of the handler.
•
Pico fuses
—12 for the stepper motors (two per stepper driver circuit
and four for the traverse motor) and 24 for the dot matrix print head
wires (one fuse for each wire in the print head). Refer to the
schematic in Appendix C for the location of the pico fuses associated
with each motor.
The components of the controller board supply the following:
• Signals to activate the solenoids, the motors, and the labeler wires
• Control signals for the two RS-232C ports and the handler port
• EPROM that contains the handler system firmware
• EEPROM that stores nonvolatile handler parameters
• Circuitry for the optics, the display, and the keyboard
• Microprocessor and kernel logic control
Refer to Appendix C for the controller board schematic and layout.
Power Supplies
Four power supply assemblies are located in the body of the 2500. See
Figure 5-4. These supplies operate off the handler’s single AC input.
•
Programming Electronics (PE) Power Supply:
PE
Controller/Waveform board (+15V).
•
Labeler Power Supply
: Print head (+24V)/solenoids
•
Toroid Power Supply
:
• Label advance motor (+36V)
• Input orbital motor (+36V)
• Output orbital motor (+36V)
• Beam head rotation motor (+36V)
• Beam traverse motor (+90V)
•
Controller Board Power Supply:
Logic, vacuum generators, sensor,
optics, RS-232C ports, and the 2500’s display (5V, +/-12V).
Preventive Maintenance
5-14 ProMaster 2500 User Manual
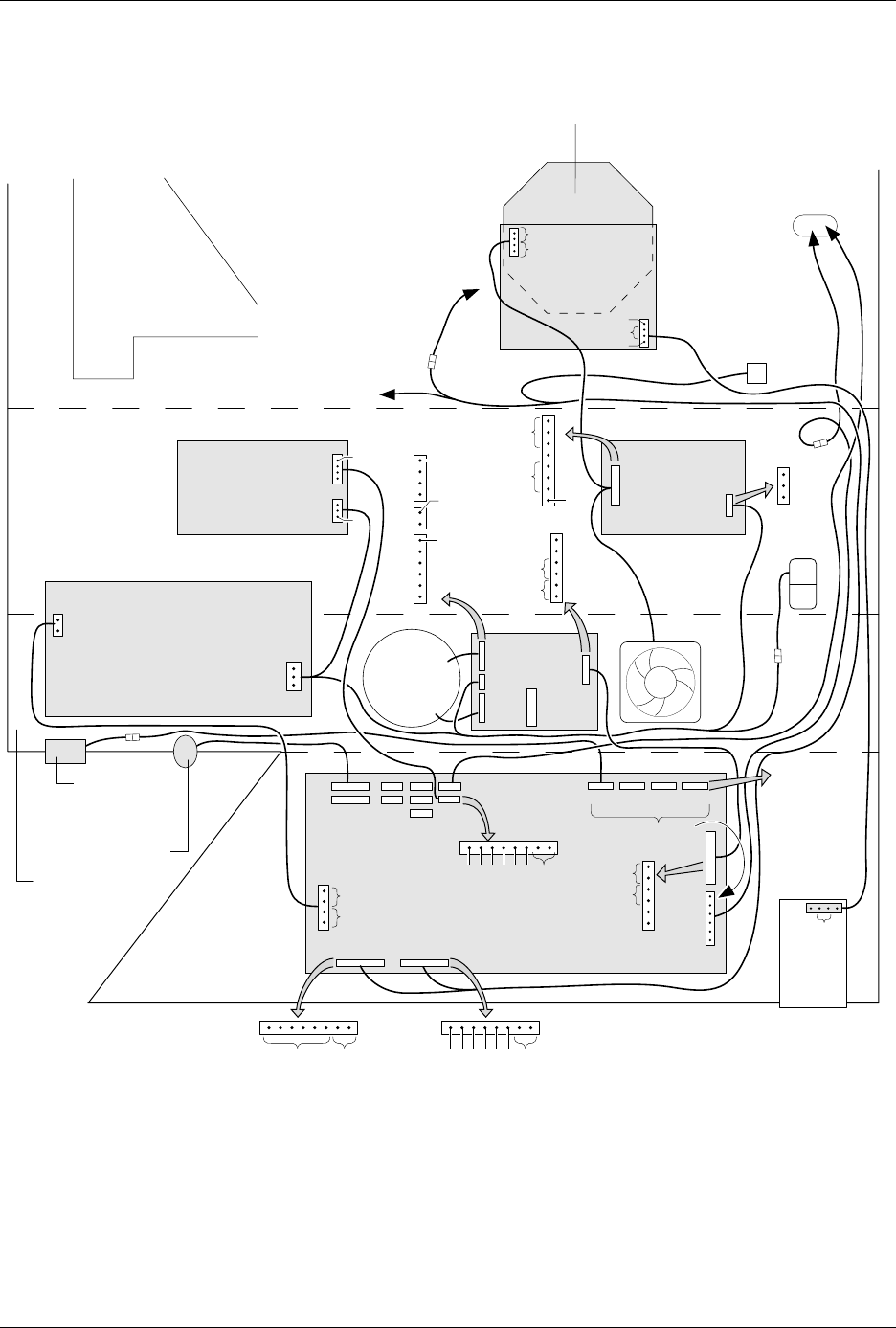
Figure 5-4
Power Supplies
MAIN PLATE (Underside)
BACK OF BASE
BOTTOM OF BASE
FRONT OF BASE
LABEL
ADVANCE
MOTOR
PRINT HEAD
P2
AC IN P1
TB2
TB1
J1
J2
J3
J4
240
220
120
100
J27
J22
J23
J24 J25
J24 J25
J3
J9 J10 J12 J13
J2
J11
*
DISK
DRIVE
AC
IN
CONTROLLER
BOARD
POWER
SUPPLY
PROGRAMMING
ELECTRONICS
POWER SUPPLY
(TO BEAM)
SOLENOID
CLAMP
(TO SOLENOIDS
2 AND 3)
CONTROLLER
BOARD
PROGRAMMING ELECTRONICS
CONTROLLER BOARD
(TO BEAM
TRAVERSE
MOTOR)
MOTORS
**
* +90V on all six pins while motor is inactive.
** Approx. 16Vac (rms) while motor is running.
FAN
TORROID
POWER
SUPPLY
LABELER
POWER SUPPLY
2055-3
1
1
120V
GND
AC IN
GND
+24V
V1
+24V
+24V GND
+24V
NC
11
1
NC
+5V
GND
+12V
NC
-12V
NC
0
24
0
24
24
24
NC
1
1
1
120Vac
120Vac
97Vac
1
+15V
NC
+90V
GND
+90V
+36V GND
+36V
GND
NC
TB2
GND
120
TB1
J1
J2
J3
J4
+90V
GND
+90V
+36V GND
+36V
J2
J10 - BEAM
ROTATE
MOTOR
J12 - INPUT
ORBITAL
MOTOR
J13 - OUTPUT
ORBITAL
MOTOR
GND
+15V
NC
GND
+15V
GND
NC
+5V