KE-3010A_20VA_20VRA_使用说明书.pdf - 第76页
第 1 部 基本篇 第 1 章 装置概要 1-57 2) FMLA 时(仅 KE-3020VRA) ① ② ③ ④ ⑤ ⑥ A D d X B C d Y E (-)旋转 (预旋转) (+) 旋转 (+) 旋转 (+) 旋转 校正 吸 取元 件 预旋转 驱动 Z 轴,吸取元件, 把元件对准激光校正高度。 (吸嘴中心) (元件中心) 激光校 正 测量 校 正 贴片 然后向(-)方向旋转 θ 轴 (预旋转) 向 (+)方向旋转 θ 轴, 开…
第 1 部 基本篇 第 1 章 装置概要
1-56
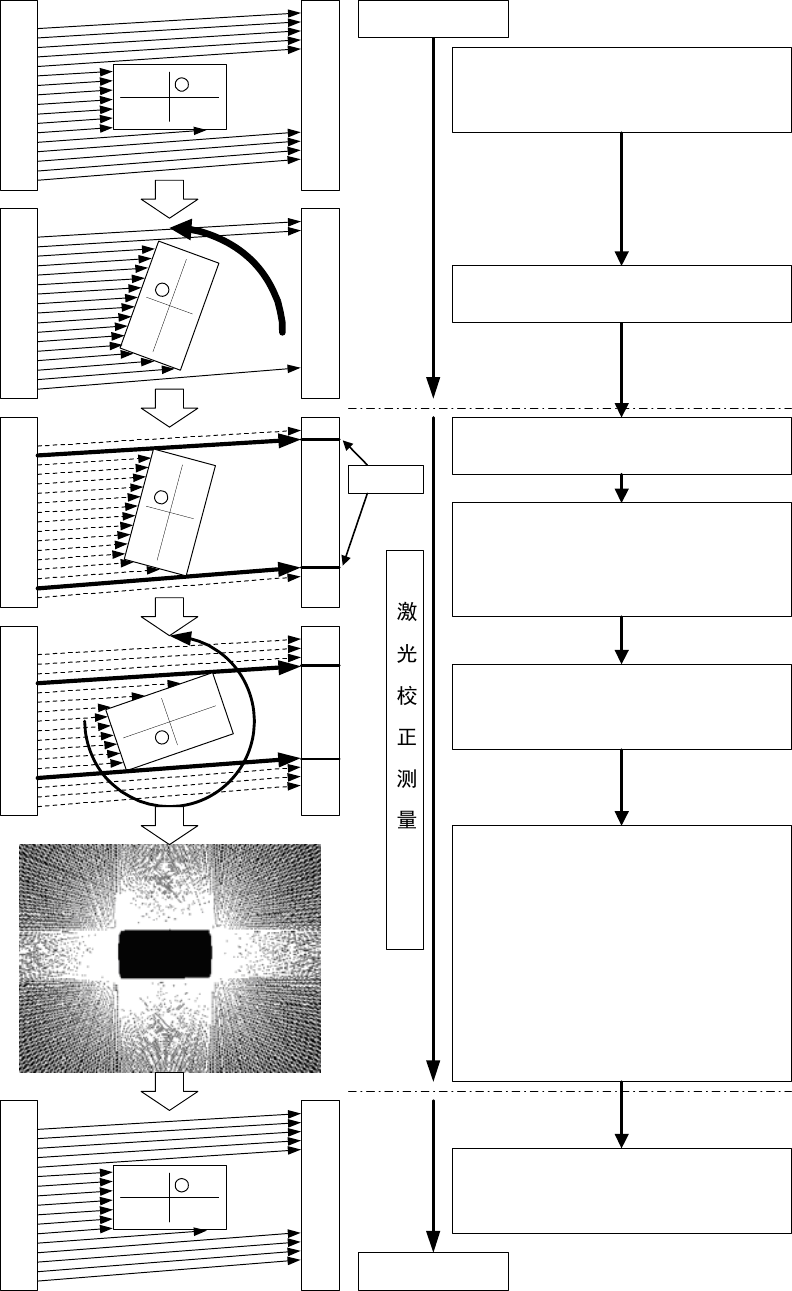
(1)激光校正定心流程
1)LNC60 时
吸取元件
驱动 Z 轴,吸取元件,
把元件对准激光校正高度。
开始旋转
θ
轴。
θ
轴加速时,测量尚未开始。
θ
轴旋转到一定程度后,
开始进行激光校正测量。
传感取得元件遮影的边缘(端)位
置数据。与边缘位置对应的光束做
为元件的“切线”,存入传感器。
θ
轴旋转 360°,取得各个角度
的切线数据。
旋转 360°后,传感器根据取得的各角
度的切线数据,生成和分析元件的
外
形,把测量结果返回贴片机。
·元件尺寸
(X 方向:wX Y 方向: wY)
·吸嘴旋转中心与元件中心间的偏移
量
(X 方向:dX Y 方向: dY)
·角度(
θ
)的偏移量:dRz
位置偏移(dX,dY)
角度偏移(dRz)
校正后,进行贴片。
贴片
边缘
①
②
③
④
⑤
⑥
第 1 部 基本篇 第 1 章 装置概要
1-57
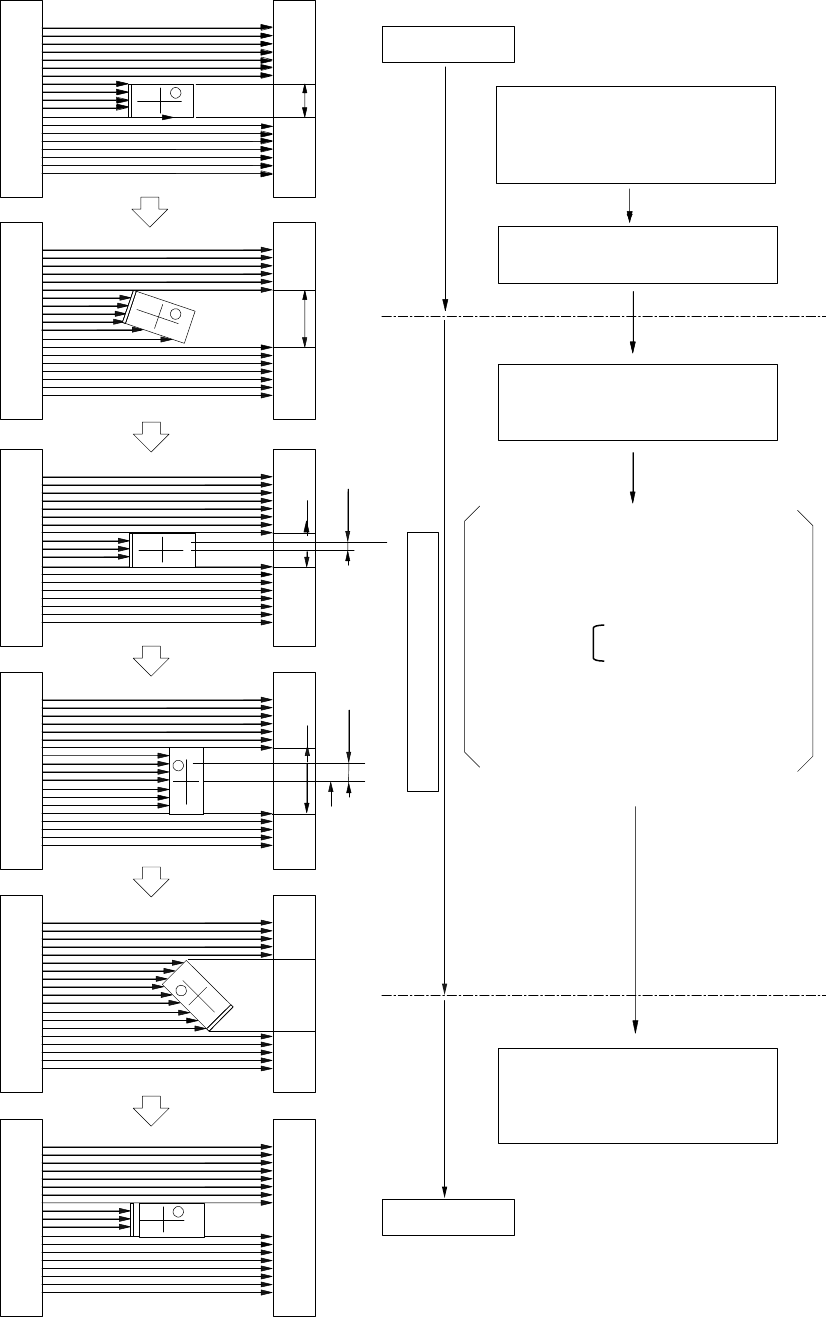
2) FMLA 时(仅 KE-3020VRA)
①
②
③
④
⑤
⑥
A
D
d X
B
C
d Y
E
(-)旋转
(预旋转)
(+) 旋转
(+)旋转
(+)
旋转
校正
吸
取元
件
预旋转
驱动 Z 轴,吸取元件,
把元件对准激光校正高度。
(吸嘴中心)
(元件中心)
激光校
正
测量
校
正
贴片
然后向(-)方向旋转
θ
轴
(预旋转)
向(+)方向旋转
θ
轴,开始
激光校正测量。
位置偏移(dX,dY)
角度偏移(d
θ
)
校正后,进行贴片。
寻找测量过程中阴影宽度最小的③④。
由于已知吸嘴中心,从与元件中心之差
Y 方向的偏移 dX
X 方向的偏移 dy
此外可根据③或④的
θ
马达的编码输出
得到角度偏移值 d
θ
。
便可知
第 1 部 基本篇 第 1 章 装置概要
1-58
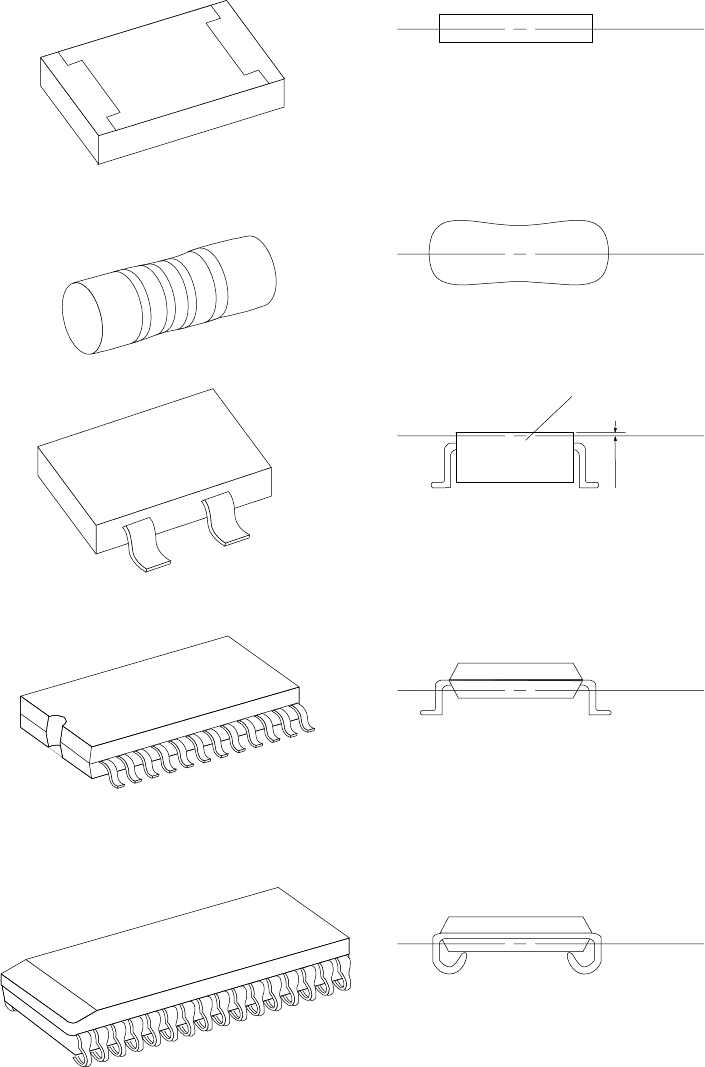
(2)主要元件的激光校正测定位置
方型芯片
圆筒形芯片
SOT
SOP·TSOP
SOJ
(元件表面与背面的中间)
激光校正测量位置
(元件的中心)
模板部
(距元件表面 0.25mm 的位置)
激光校正测量位置
激光校正测量位置
(元件背面与脚根部)
(元件表面与脚根部)
激光校正测量位置
激光校正测量位置
0.25