SM-131-006.pdf - 第243页
Device Name Chip Mounter Block Name Page No. Unit Name Revision Model Item GXH-1 Chapter 13 Layout of Electrical 11. Layout of Robot Cable Connection Panel Layout 11.1 Layout of Robot Cable Connection Panel The robot cab…
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model ItemGXH-1
Chapter 13 Layout of Electrical
10. Layout of Each DC Power Units
Layout
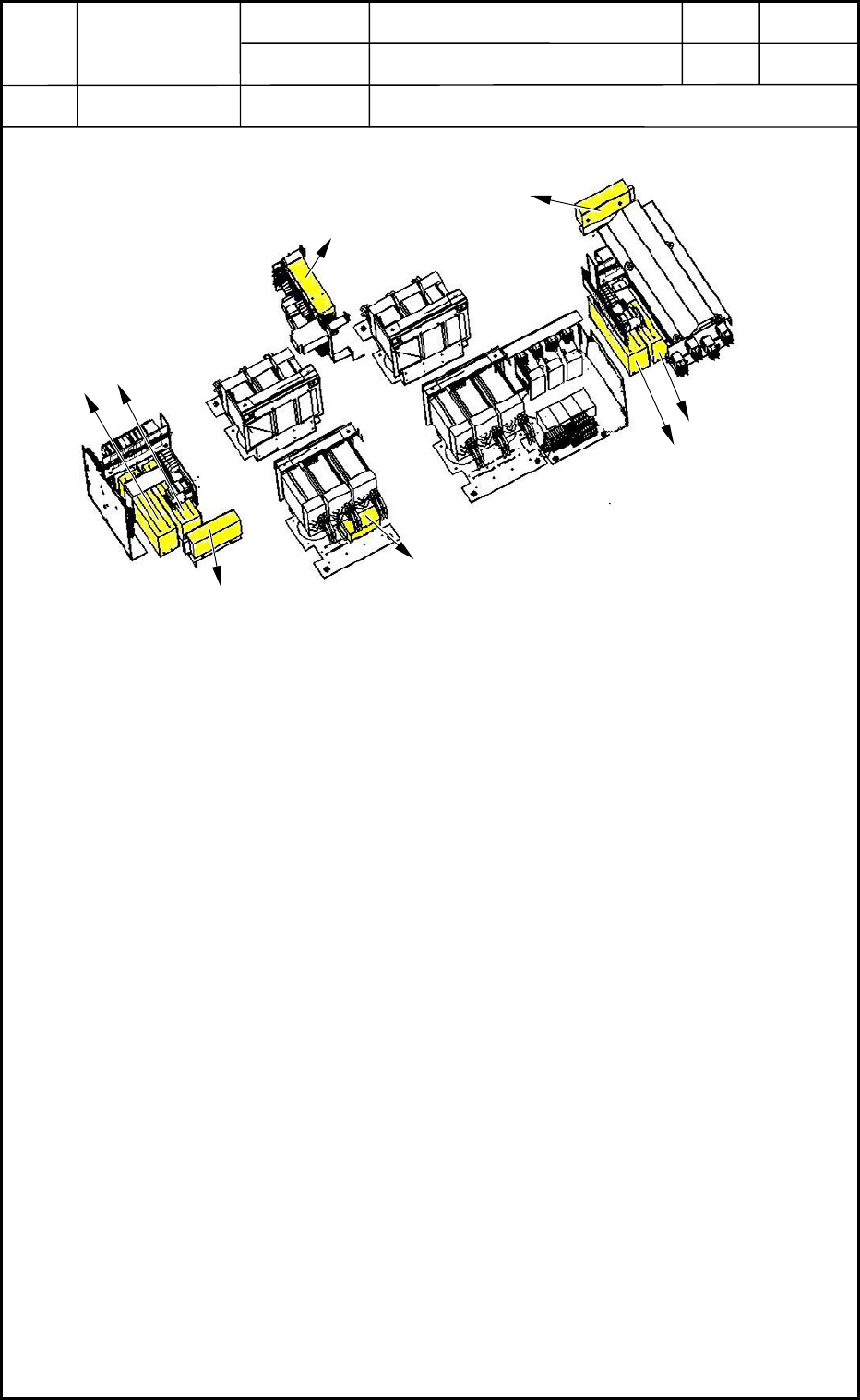
10.1 Layout of DC Power Units
A: G01 (24 V DC)
1. 24A (For Safety Circuit)
2. 24B1 (For "INPUT")
3. 24B2 (For "OUTPUT", 24 V DC Loads, and 24 V DC Machine)
4. 24C (For Power Supply to Externals via I/F of Input/Output Machines)
5. 24F (For Control Power Supply of Head Multiaxis Servomotor Drivers)
B: G03 (48 V DC)
1. 48E2A (For Transfer NL-L, NA-L1, and NB-L1)
2. 48E3A (For Chute Width NL-W1, NL-W2, NB-W1, and NB-W2)
3. 48E4A (For Transfer NR-L and NC-L1)
4. 48E5A (For Chute Width NR-W1 and NR-W2)
C: G05 (5 V DC)
1. 5E (For Control Power Supply to Transfer Multiaxis SMD on R Side and Main Power
Supply)
D: G05 (5 V DC)
1. 5E (For Control Power Supply to Transfer Multiaxis SMD on L Side and Main Power
Supply)
E: G04 (24 V DC)
1. 24G (For Feeders C and D)
F: G02 (48 V DC)
1. 48D3A (For Main Power Supply to Head C Multiaxis SMD)
2. 48D3B (For Main Power Supply to Head D Multiaxis SMD)
G: G04 (24 V DC)
1. 24G (For Feeders A and B)
H: G02 (48 V DC)
1. 48D3C (For Main Power Supply to Head A Multiaxis SMD)
2. 48D3D (For Main Power Supply to Head B Multiaxis SMD)
0406-001
13-25
A
B
C
D
E
F
G
H
Front Side of Machine
Rear Side of Machine
Fig. M66 Arrangement of DC Power Units
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model ItemGXH-1
Chapter 13 Layout of Electrical
11. Layout of Robot Cable Connection Panel
Layout
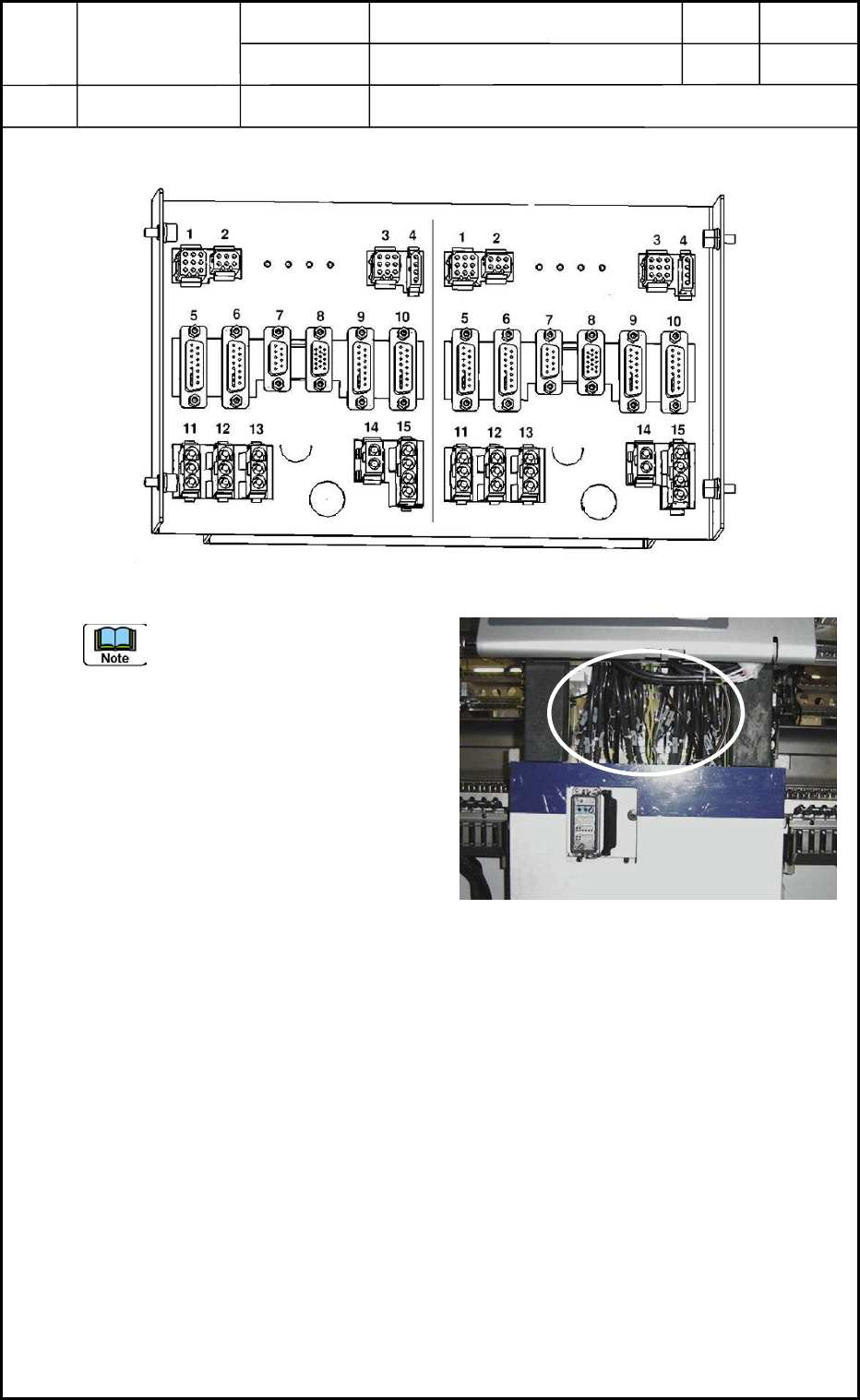
11.1 Layout of Robot Cable Connection Panel
The robot cable connection panel is
located inside the cover under the
operation monitor. See Fig. M68.
(Two panels are used - One located on
the front side of the machine and the
Other on the rear side.)
Description of Each Connector
1. Connector for Lighting Lamp Cable (For Lighting of P.E.C. Recognition Camera)
2. Connector for Interlock Cable (For Head Up/Down Sensor)
3. Connector for X-Axis Limit Sensor Cable
4. Reserved Connector
5. Connector for Encoder Cable of X-Axis Motor
6. Connector for SSCNET Cable (For Signal from Head Multiaxis Board)
7. Connector for LINK Cable (For Slip Ring and Linear Measure Sensor Signal)
8. Connector for Camera Cable (For P.E.C. Recognition Camera)
9. Connector for Encoder Cable of Y1-Axis Motor
10. Connector for Encoder Cable of Y2-Axis Motor
11. Connector for Power Supply Cable of Y1-Axis Motor
12. Connector for Power Supply Cable of Y2-Axis Motor
13. Connector for Power Supply Cable of X-Axis Motor
14. Connector for 48 V DC Cable of Head Multiaxis Board (For Head Multiaxis Board)
15. Connector for 24 V DC Cable (For UB25 Board)
0406-001
13-26
Fig. M67 Robot Cable Connection Panel
Side B (Side C)
Side D (Side A)
Fig. M68 Location of Robot Cable Connection Panel
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model ItemGXH-1
Chapter 13 Layout of Electrical
12. Layout of Covers
Layout
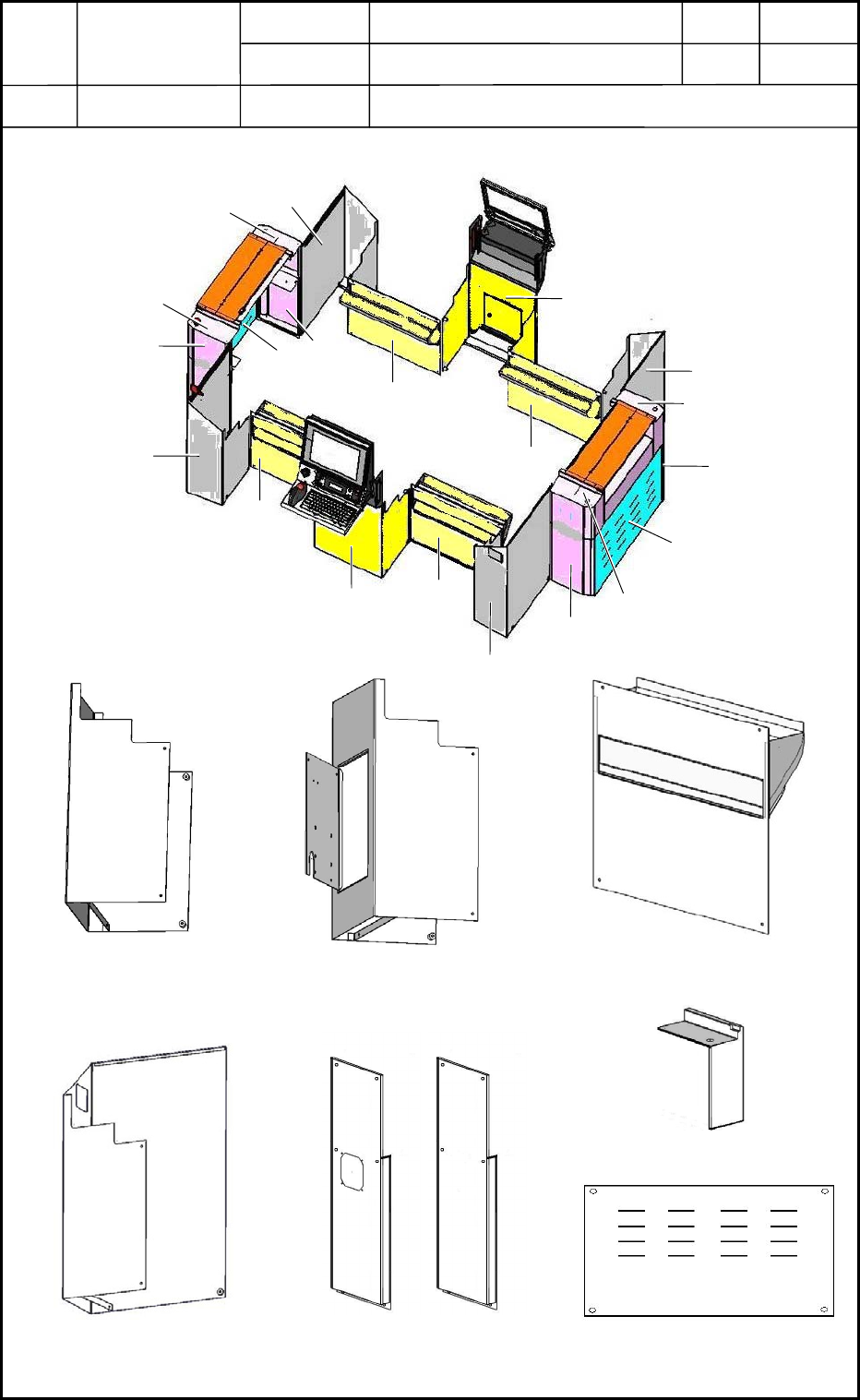
12.1 Layout of Covers
A
C4
B
C2
C1
D1
E1
C3
D2
D4
D3
E2
E3
E4
F2
F1
F4
F3
G2
G1
Fig. M69 Whole View of Covers
Fig. M70 Magnified View of A
Fig. M71 Magnified View of B
Fig. M72 Magnified View of C
Fig. M73 Magnified View of D Fig. M74 Magnified View of E
Fig. M75 Magnified View of F
Fig. M76 Magnified View of G
0406-001
13-27