SM-131-006.pdf - 第290页
Device Name Chip Mounter Block Name Page No. Unit Name Revision Model Item GXH-1 Chapter 17 Servo Alarm 1. Troubleshooting on Servo Alarm Alarm Codes Contents of Servo Alarm Cause and Remedy (1) The travel in the group e…
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
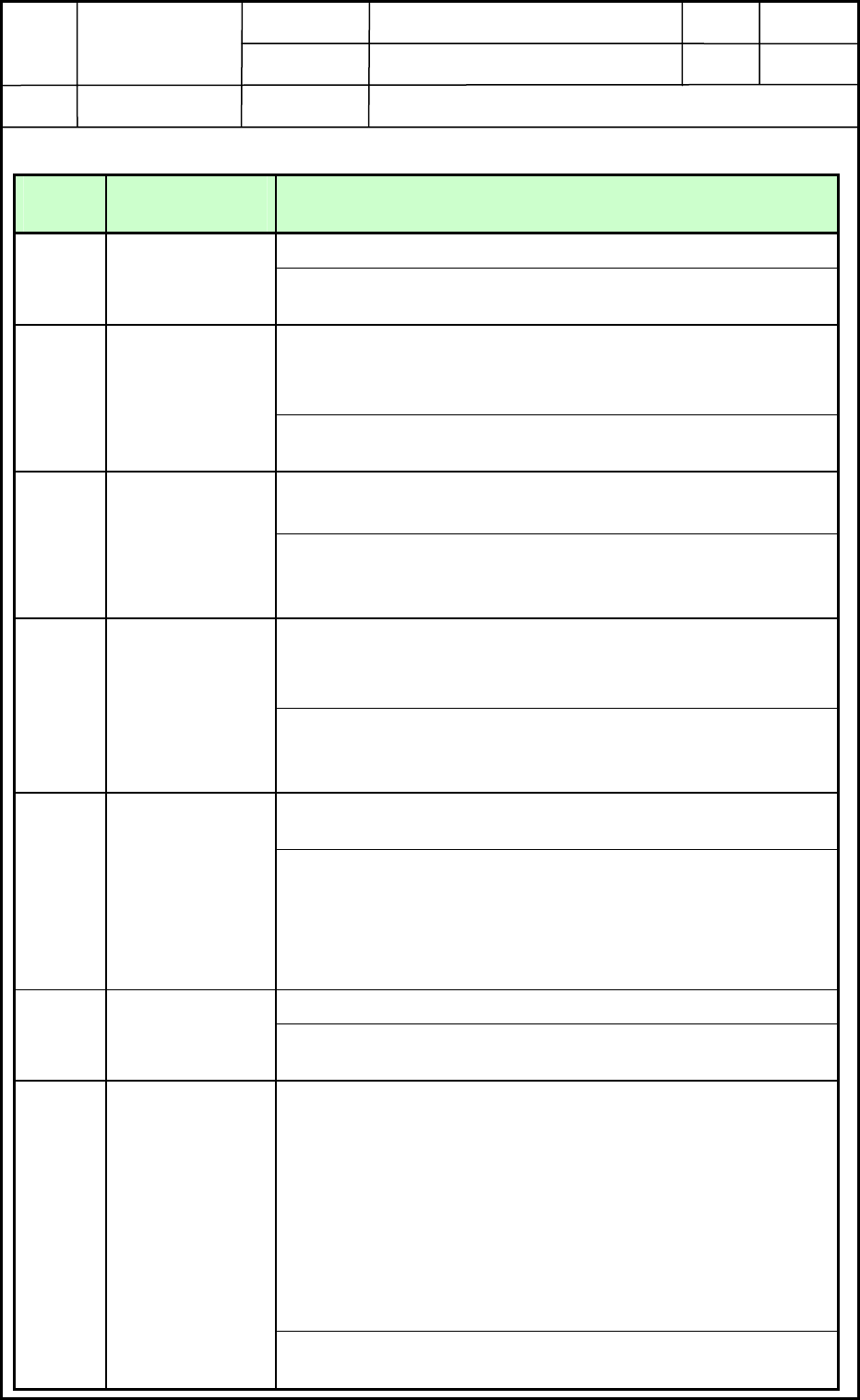
The command speed is "0" (zero). 21 Command
speed 0
(Remedy) Set the commanded speed to more than 1.
Negative values are allocated for the start and end points or
the allocated values are out of the specified range,
exceeding the 2-port memory.
22 Point number
Error
(Remedy) Set the point No. correctly.
The operation mode was changed while the machine was
running.
23 Run mode
change
(Remedy) Do not change the operation mode while the
machine is running.
When the commanded position was changed, the
deceleration stop position exceeded the commanded
position.
24 Locate position
excess
(Remedy) Issue a position command that specifies the
shortest distance required to stop the machine.
A negative value was specified for the incremental feed
travel.
26 Incr mvt amount
uncorrect
(Remedy) Set a positive value for the incremental feed
travel.
Specify the direction, using the command bit
"DIR".
The set value for the parameter is erroneous. 37 Parameter Error
(Remedy) Set the correct value in the parameter range.
(1) There is an axis for which other than the linear
interpolation mode (LIP) is selected in the same group.
(2) More than 4 axes were allocated as the number of axes
that compose a group.
(3) Linear interpolation was started in a group other than
Groups 1 and 2.
(4) The number of points differs in the group.
(5) The unit (Pr.0200) of the speed is rpm-specified.
40 Line intrpl start
condtn err
(Remedy) Set the correct data.
17-28
0506-001
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
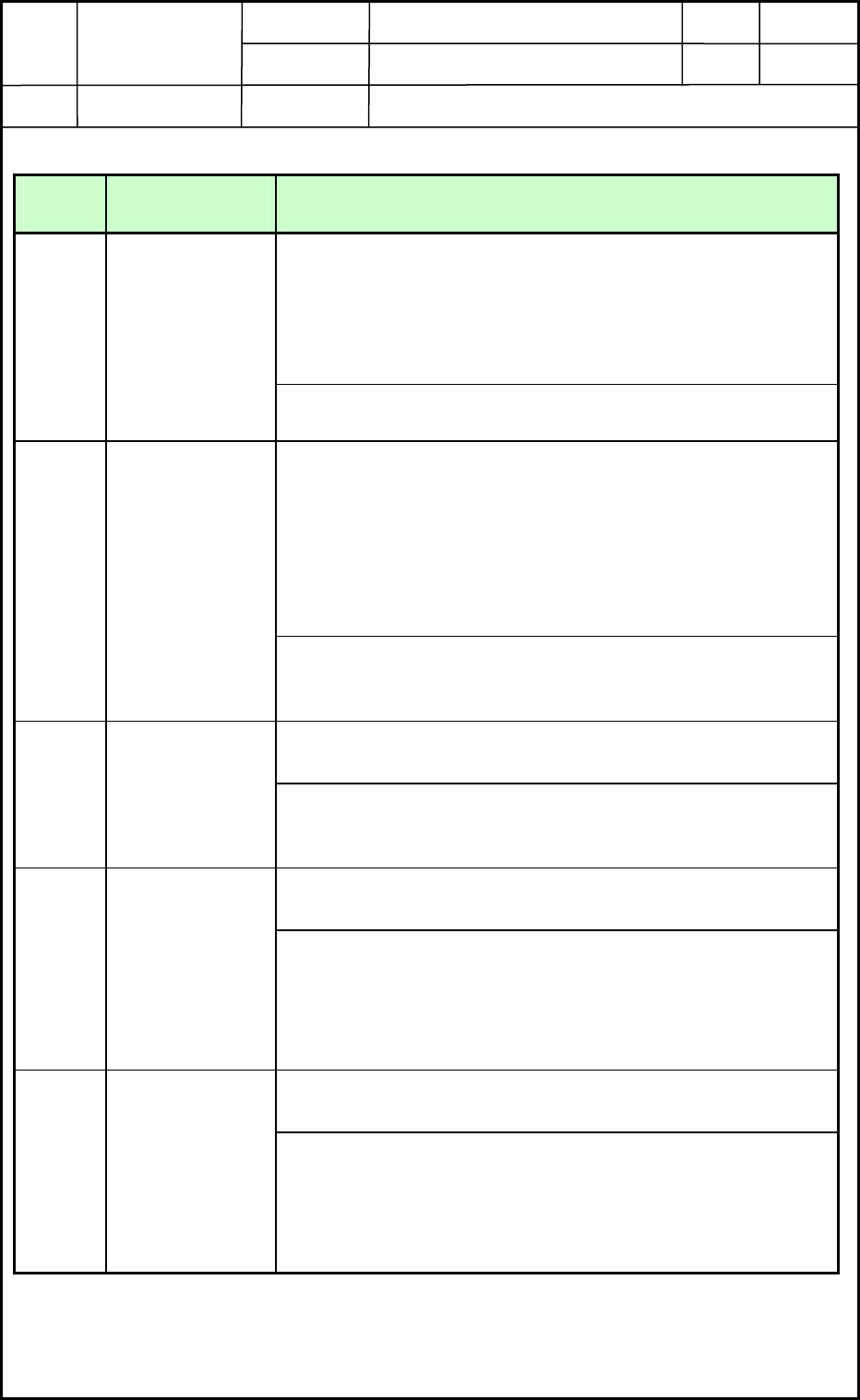
(1) The travel in the group exceeded the maximum value
"999999999".
(2) When "1: Alarm Stop" is selected as a speed excess
processing control, a value exceeding the speed limit is
allocated for the group composing axes.
41 Line intrpl point
data error
(Remedy) Set the correct data.
(1) The auxiliary axis is set in the "RUN" mode.
(2) The auxiliary axis is set in the "ALARM" mode.
(3) The auxiliary axis is set in the "READY OFF" mode.
(4) The auxiliary axis is set in the "SERVO OFF" mode.
(5) The external running stop signal and the running stop
signals (STP, RSTP) are "ON".
42 Err of start line
intrpl asst axisr
(Remedy) Remove the cause of the alarm from the auxiliary
axis.
The number of axis self is set for the interference check and
check stop axes.
43 Interference chk
setup Err
(Remedy) Review the set value for the control parameter
Pr.20E.
The interference check alarm condition was established at
the starting.
44 Interference
check Error
(Remedy 1) Confirm that the correct value is specified as
the parameter related to the interference check.
(Remedy 2) Change the operation pattern such that no
interference check error can occur.
The collision prevention alarm condition was established
during the operation.
45 Collision prevent
Error
(Remedy 1) Confirm that the correct value is specified as
the parameter related to the interference check.
(Remedy 2) Change the operation pattern such that no
collision prevention error can occur.
17-29
0506-001
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
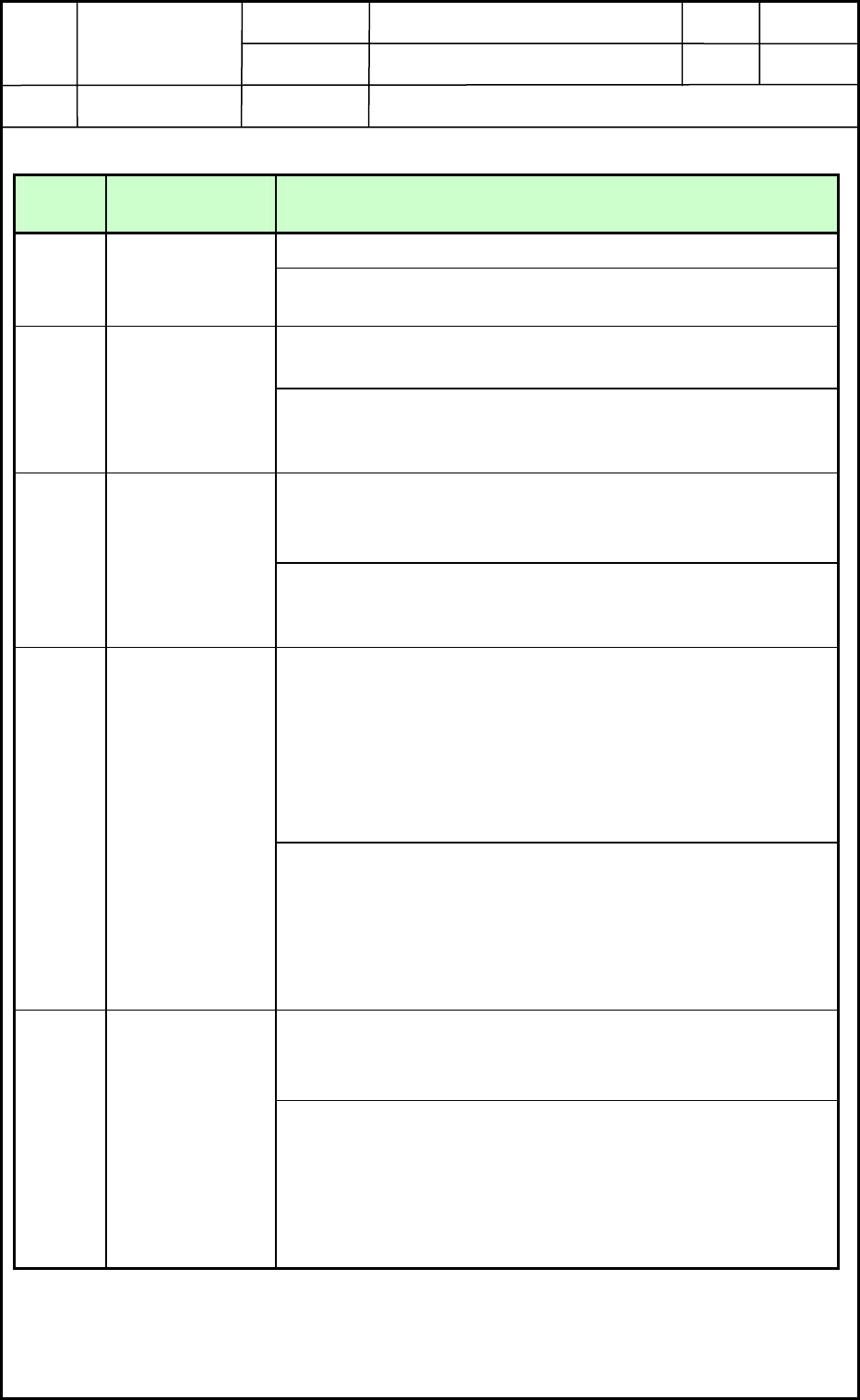
Stopped by the interference check stop axis. 46 Interference chk
stop axis
(Remedy)
The driving mode was changed under the condition that
prohibits the mode change of the parallel driving axis.
50 Pal dr mode
chng uncorrect
(Remedy) Change the driving mode only when the
requirements for the change are fulfilled.
The zeroing, the automatic, or the linear interpolation
operation was performed in the asynchronous fine
adjustment mode of the parallel driving axis.
51 Pal dr
asynchronous
mode
(Remedy) Perform the zeroing, the auto, or the linear
interpolation operation in the synchronous mode.
(1) A zeroing method other than the scale origin signal
detection type is selected for the zeroing operation of the
parallel driving axis.
(2) No pair axis relative to the parallel driving axis group No.
is specified.
Or, the same parallel driving group No. is specified for
more than 3 axes.
52 Pal dr axis setup
Error
(Remedy 1) Select the zeroing method (described in the left
column) for the zeroing method of "Zeroing
Option 1".
(Remedy 2) Set the corresponding parallel driving axis
group No., making a pair.
As for the parallel driving axis, the deflection between the
master and slave axes exceeded the parallel driving
deflection excess range.
53 Pal dr deflection
is excessive
(Remedy) Perform an adjustment so that the deflection
between the master and slave axes can decrease.
In addition, review the deflection excess width of
the parameter and the delay of the excess
deflection detection start.
17-30
0506-001