JM-10_动作说明书 - 第12页
动作说明书 3-2 3-1-1-3 各轴各自的原点复归动作 < 原点复归方式 > 轴 原点复归方式 概述 X , Y 限位开关起点式原 点复归 在限位开关前端开始减速, 再返回到限位开关前端, 然后以爬 行速度进行移动,以距限位开关前端第 1 个 Z 相作为原点。 Z 限位开关起点式原 点复归 在限位开关前端开始减速, 再返回到限位开关前端, 然后以爬 行速度进行移动,以距限位开关前端第 1 个 Z 相作为原点。 θ 比例式…
动作说明书
3-1
3 关于各项功能
3-1 原点复归动作
3-1-1 X,Y,Z,θ 轴
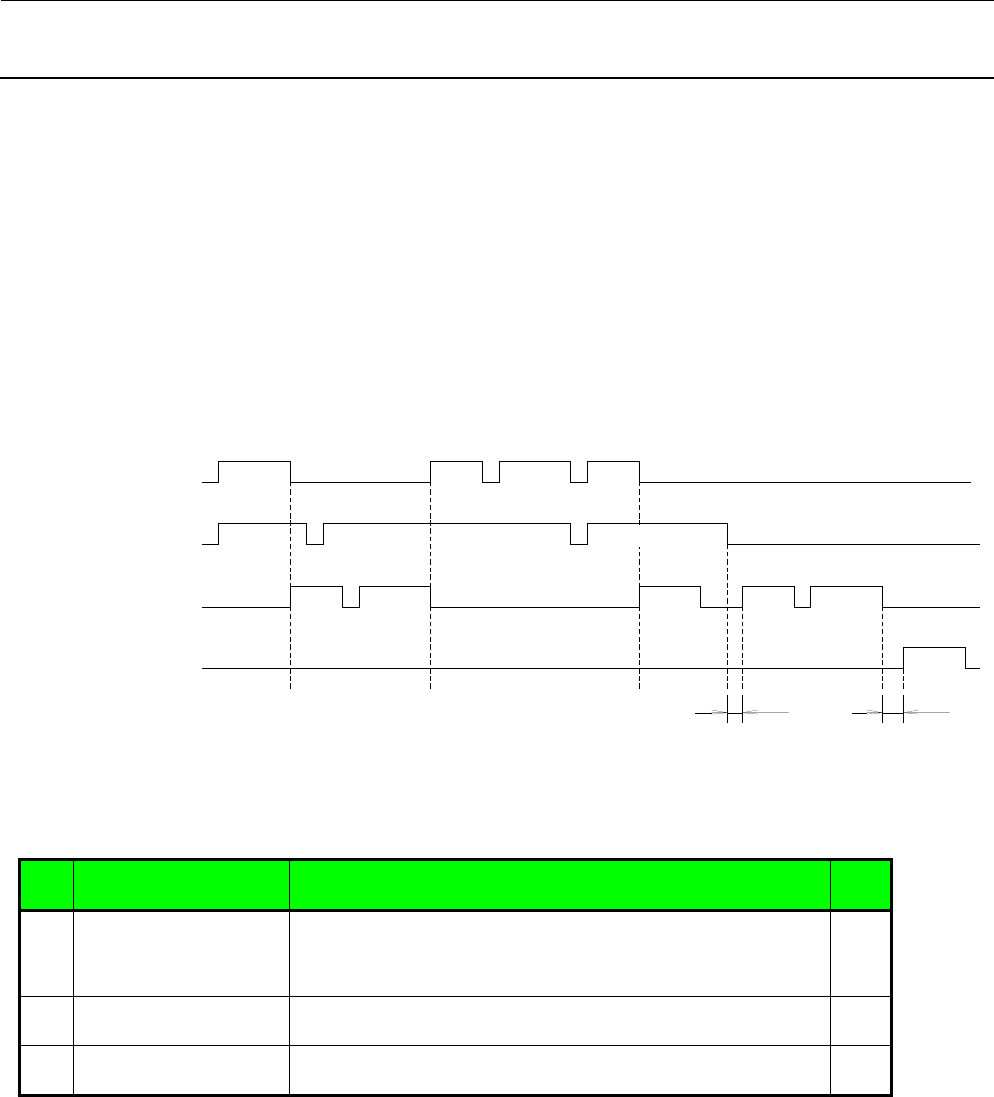
3-1-1-1 原点复归动作的时机
Z,θ 的所有轴和支撑台轴同时开始原点复归。XY 轴是在 Z 轴原点复归结束、达到安全的高度之后再开始
动作。为了确认所有轴的原点定位结束,在 CAL 块上进行等候,确认动作结束后,经过 200msec 后拍摄
CAL 块的第一标记。将标记识别结果用于 XY 的坐标校正,结束原点复归。并且,为了使 θ 轴的编码器与
LNC 的计数一致,将 LNC 的计数器复位。
原点复归
Z軸
仮原点
復帰
原点
復帰
安全
高さ
θ軸
予備
動作
原点復帰 偏芯吸収角度
XY軸
予備
動作
原点
復帰
CAL
移動
認識 原点
確定
LNCカウンタリセット
リセット
200 300
予備
動作
3-1-1-2 原点复归动作之后的 LNC 检测动作
在原点复归动作中执行 CAL 块的标记识别后,进行以下的 LNC 检测动作。①、②允许以 MSP 通过检测。
NO. 检测内容 MSP
① 激光通信错误的复原
处理
当发生 1394 通信错误时进行初始化,使报警复原 ○
② 以激光检查外部吸嘴 将外部吸嘴降到激光高度,以 ONCE 指令确认看得到映像 ○
③ 激光的编码器确认 检查 LNC 的 U/D 计数器是否与 θ 轴的旋转同步 ×
Z 轴
θ 轴
XY 轴
LNC 计数器复位
暂时原点
复归
预备
动作
预备
动作
预备
动作
原点
复归
原点
复归
原点复归
偏心吸收角度
CAL
移动
识别
确定
原点
复位
安全高
度
动作说明书
3-2
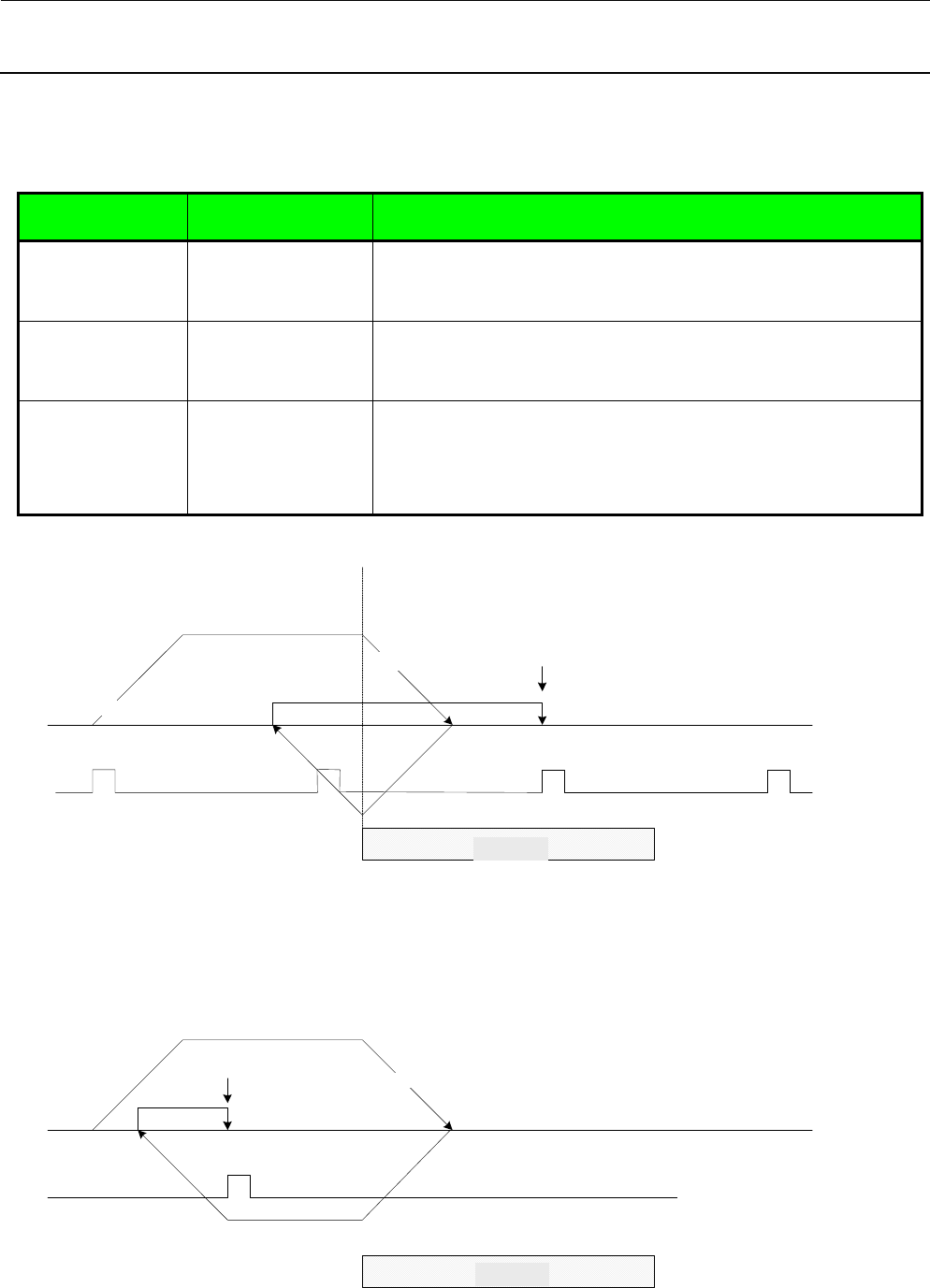
3-1-1-3 各轴各自的原点复归动作
<原点复归方式>
轴 原点复归方式 概述
X,Y 限位开关起点式原
点复归
在限位开关前端开始减速,再返回到限位开关前端,然后以爬
行速度进行移动,以距限位开关前端第 1 个 Z 相作为原点。
Z 限位开关起点式原
点复归
在限位开关前端开始减速,再返回到限位开关前端,然后以爬
行速度进行移动,以距限位开关前端第 1 个 Z 相作为原点。
θ
比例式原点复归 采用与 XY 相同的比例式原点复归。由于 θ 轴没有近点限位开
关,所以与控制参数的限位开关逻辑相反,在始终处于检测到
近点限位开关的状态下进行原点复归。
近点ドグ
クリープ速度
起動
原点復帰速度
原点
Z相パルス
ドグクレードル式原点復帰
近点ドグ
Z相パルス
原点
スケール原点信号検出式原点復帰
起動
原点復帰速度
クリープ速度
近点ドグで減速
反転
近点ドグで減速
反転
限位开关起点式原点复归
起动
Z 相脉冲
原点复归速度
爬行速度
到限位开关减速
原点
反转
近点限位开关
比例原点信号检测式原点复归
起动
Z 相脉冲
原点复归速度
到限位开关减速
反转
近点限位开关
爬行速度
原点
动作说明书
3-3
<各轴原点复归前的预备动作>
轴 预备动作的内容
X,Y 如果在近点限位开关上,则以 jog 方式向离开近点限位开关的方向移动,
在近点限位开关变为 OFF 处停止 jog。
Z 进行的预备动作是,使原点复归的开始高度与距近点限位开关边缘约 6mm
的位置对齐。
θ
当无条件地进行原点复归动作时,如果 Z 相与原点复归开始位置离开过多,
则以爬行速度寻找 Z 相需要非常长的时间。进行的预备动作是,为了缩短
这一时间而以高速寻找 Z 相,使原点复归开始点位于 Z 相附近。
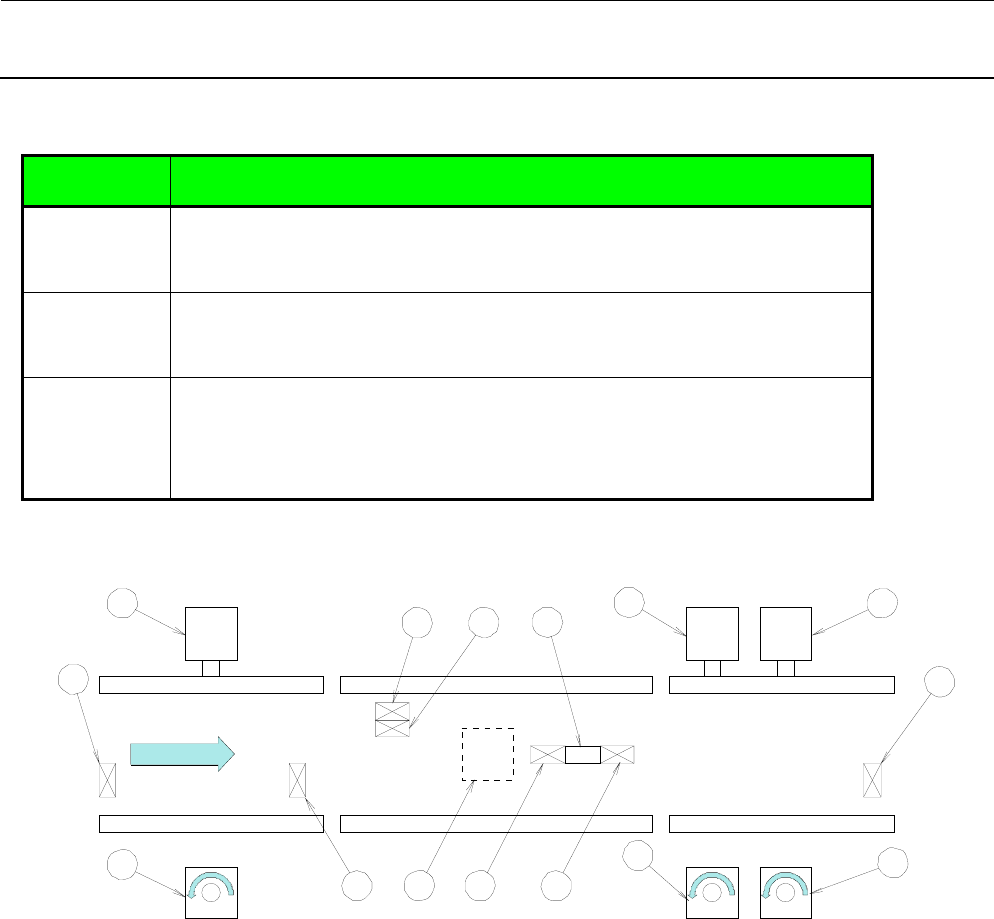
3-2 传送带装置
1. IN 传感器
2. 进口停止传感器
3. WAIT 传感器
4. COUT 传感器
5. 支撑台 UP 传感器
6. 支撑台 DOWN 传感器
7. 止动器
8. OUT 传感器
9. 支撑台汽缸
10. 传送 IN 电动机(步进电动机)
11. 传送 CENTER 电动机(步进电动机)
12. 传送 OUT 电动机(步进电动机)
8
4
6 5
12
12
11
7
1
11
3
10
10
2 9