JM-10_动作说明书 - 第16页
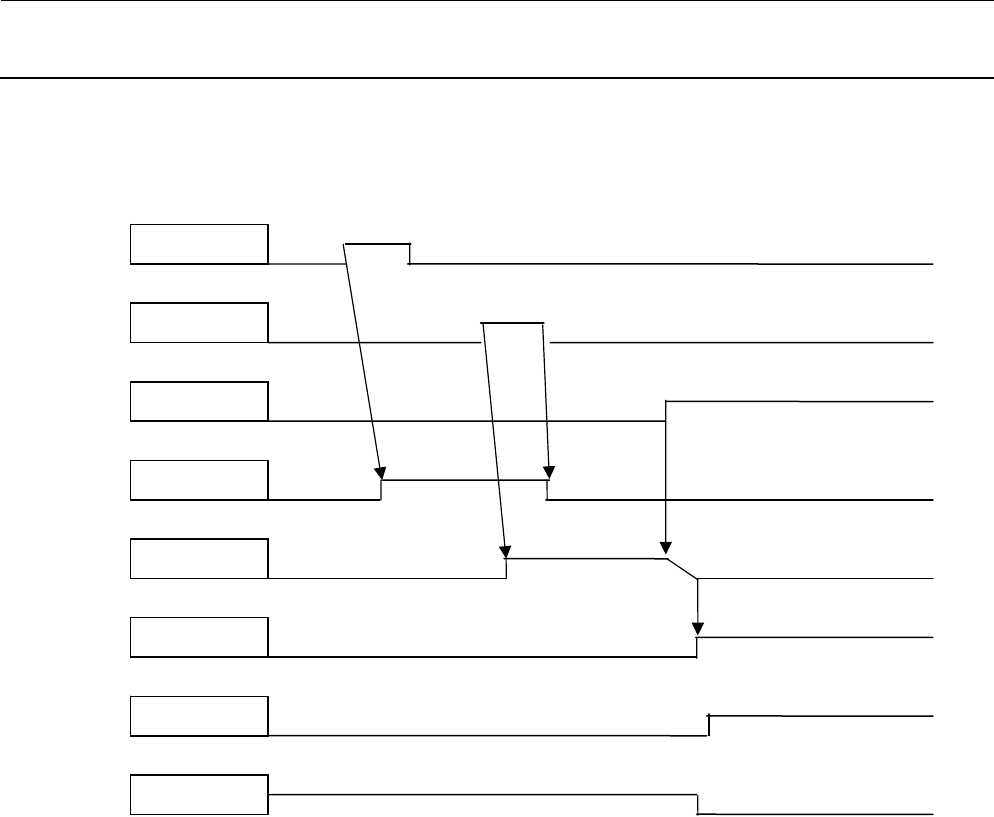
动作说明书 3-6 2 ) 基板传出 ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF ON OFF STOP 传感器 C.OUT 传感器 OUT 传感器 中央电动机 OUT 电动机 支撑台 UP 传感器 DOWN 传感器
动作说明书
3-5
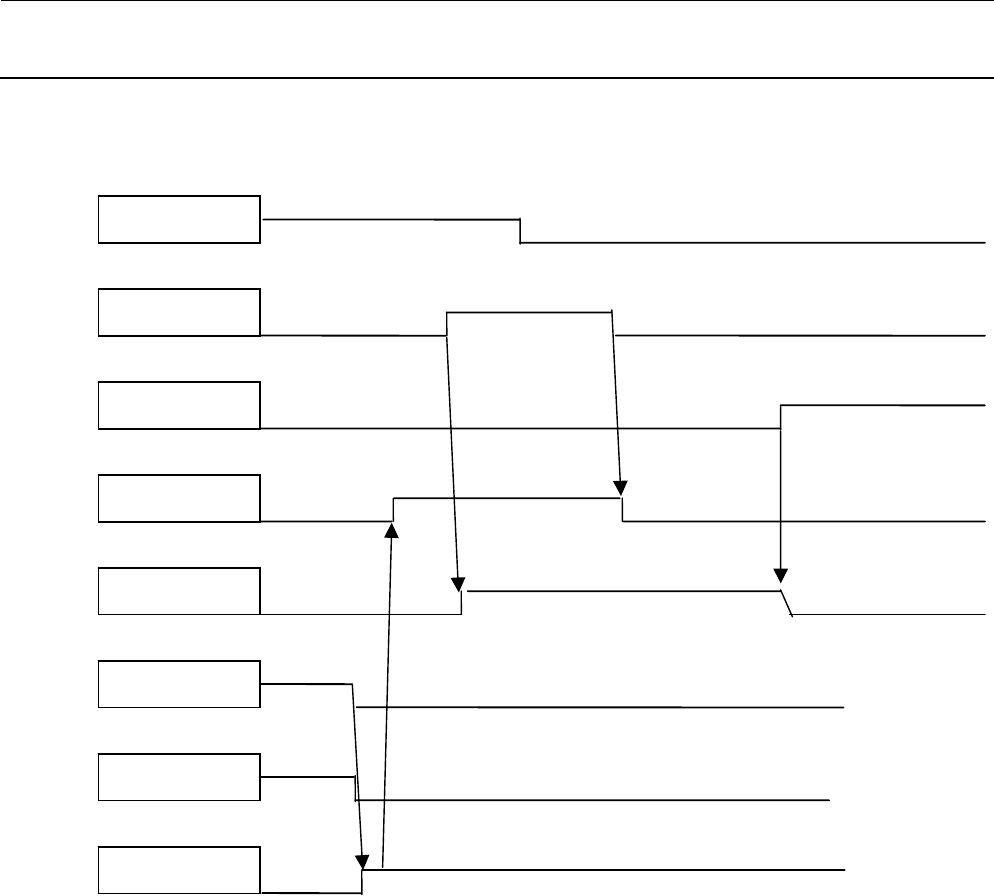
3-2-2 基板传送同步时间图
1) 基板装入 基板进给速度:高速
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
WAIT 传感器
STOP 传感器
IN 电动机
中央电动机
支撑台
UP 传感器
DOWN 传感器
IN 传感器
动作说明书
3-6
2) 基板传出
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
STOP 传感器
C.OUT 传感器
OUT 传感器
中央电动机
OUT 电动机
支撑台
UP 传感器
DOWN 传感器
动作说明书
3-7
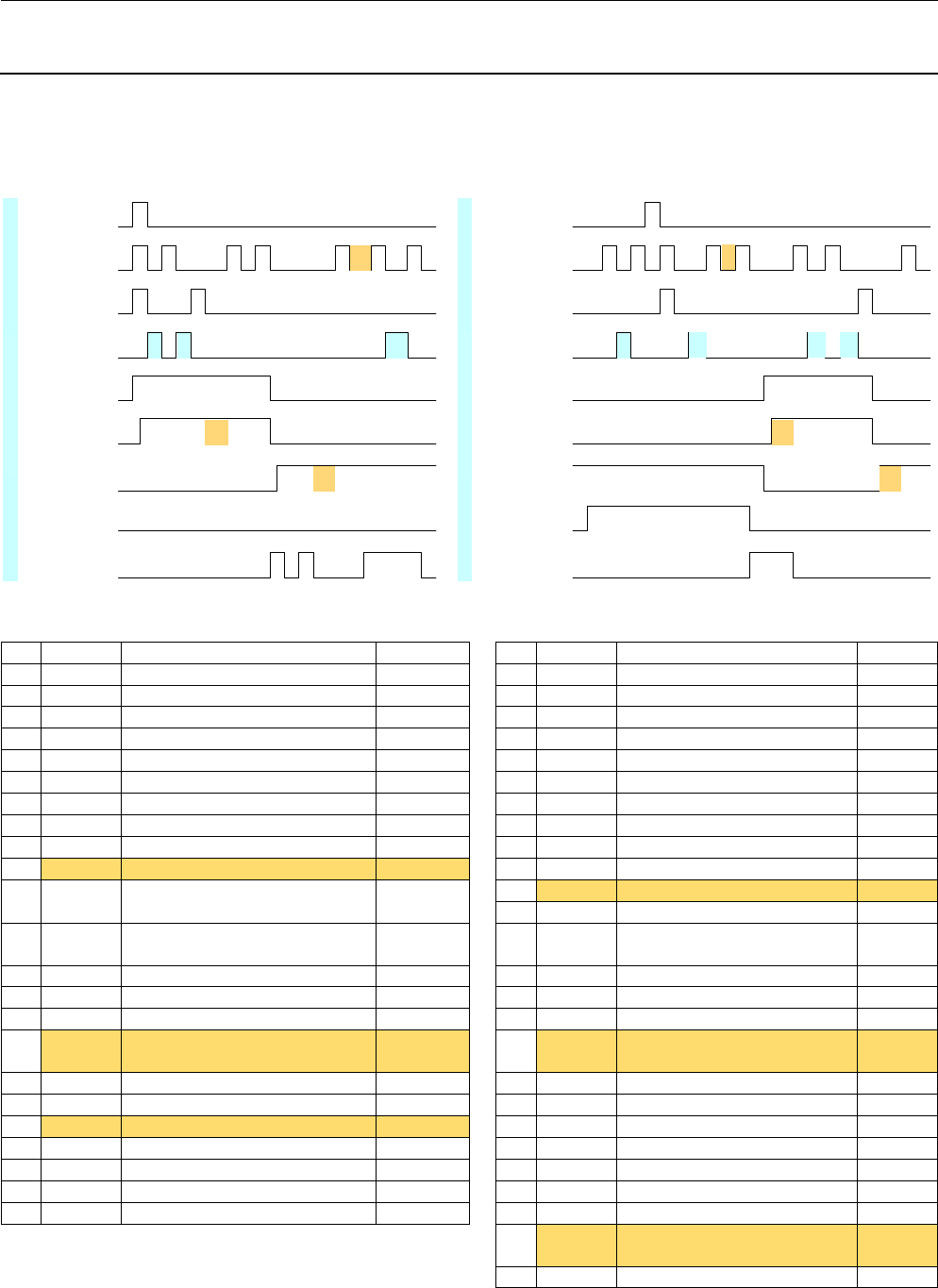
3-3 吸嘴更换动作
3-3-1 有 θ 修正时
移動
停止
移動
停止
回転
停止
計測
非計測
Open
Close
On
Off
On
Off
On
Off
On
Off
XY
Z
θ
レーザ
スライド
プレート
Open
センサ
Close
センサ
Vaccume
Blow
1
3
2
4
10
C
5
6
7
8
9
11 12
13
14 15
16
C
ノズル返却動作(θ補正有)
17
18
19
A
20
21
22
23
移動
停止
移動
停止
回転
停止
計測
非計測
Open
Close
On
Off
On
Off
On
Off
On
Off
XY
Z
θ
レーザ
スライド
プレート
Open
センサ
Close
センサ
Vaccume
Blow
3
8
13
ノズル装着動作(θ補正有)
1
2 4
56
7
9
10
11
12
B
14
15
16
17
E
18
19
20
21
22
23
24
25
D
26
吸嘴归还动作(有 θ 校正) 吸嘴安装动作(有 θ 校正)
项 目 动 作 备 注 项 目 动 作 备 注
1 X、Y 开始向归还吸嘴位置移动 1 真空 On
2 θ 预加载 2 Z 向检测有无吸嘴高度移动
3 Z 向确认有无吸嘴高度移动 3 激光 检测有无吸嘴 ONCE
4 滑板 开动作开始 4 Z 向 XY 轴能够移动高度移动
5 X、Y 向归还吸嘴位置移动结束 5 X、Y 开始向安装吸嘴位置移动
6 激光 检测有无吸嘴 ONCE 6 X、Y 向安装吸嘴位置移动结束
7 Z 向归还吸嘴姿态检测高度移动 7 Z 向滑板+5mm 位置移动
8 激光 检测归还吸嘴姿态 SWEEP 8 θ 移动到吸嘴安装角度
9 θ 向归还吸嘴角度移动 9 Z 等待卸料 10msec
10 滑板 等待开动作结束 Wait C 10 激光 故障检测 ONCE
11 Z
向滑板位置移动
2 级控制第 1 次
11 Z 向交换吸嘴位置移动 Wait B
12 真空 压力上升检测
12 Z 向滑板位置移动
2 级控制第 2 次
13Z 向滑板能够动作位置移动
13 滑板 闭动作开始 14真空 Off
14 送风 On第 1 次 50msec 15 送风 On
15 送风 On第 2 次 50msec 16 滑板 开动作开始
16 滑板 等待闭动作结束 Wait C 17 Open
传感器
On Wait E
17 Z 向交换吸嘴高度移动 18送风 Off
18 送风 On 19 Z 向吸嘴安装检测高度移动
19 Z 保持交换吸嘴高度 Wait A 20 激光 检测有无吸嘴 ONCE
20 Z 向检测有无吸嘴高度移动 21Z 向吸嘴安装姿态检测高度移动
21 激光 检测有无吸嘴 ONCE 22激光 检测吸嘴安装姿态 SWEEP
22 Z 向 XY 轴可移动高度移动 23θ 移动到吸嘴安装校正角度
23 送风 Off 24 滑板 闭动作开始
25Close
传感器
On Wait D
26Z 向 XY 轴能够移动高度移动
Wait A:50msec Wait B:30msec Wait C:80msec Wait C:80msec Wait E:80msec
吸嘴归还动作(有 θ 校正)
吸嘴安装动作(有 θ 校正)
激光
滑板
Open
传感器
Close
传感器
移动
停止
移动
停止
旋转
停止
计测
非计测
移动
停止
移动
停止
旋转
停止
计测
非计测
激光
滑板
Open
传感器
Close
传感器