JM-10_动作说明书 - 第21页
动作说明书 3-11 3-5 Z 轴动作 3-5-1 Z 轴的速度分类 中心为 LA 的轴、 轴的速度分类 Z 轴、 轴的速度分类 吸附时的 Z 轴 贴装时的 Z 轴 轴 元件种类 最小元件宽度 ( W ) 下降 上升 下降 上升 测定 测定外 典型的元件 方芯片 方芯片 ( L E D ) 网络阻抗 Min ≦ W < 0.45 高速 中速 高速 2 高速 2 高速 高速 0603 0.45 ≦ W < 1.1 高速 …
动作说明书
3-10
3-4 激光识别、VCS 识别元件的安装流程
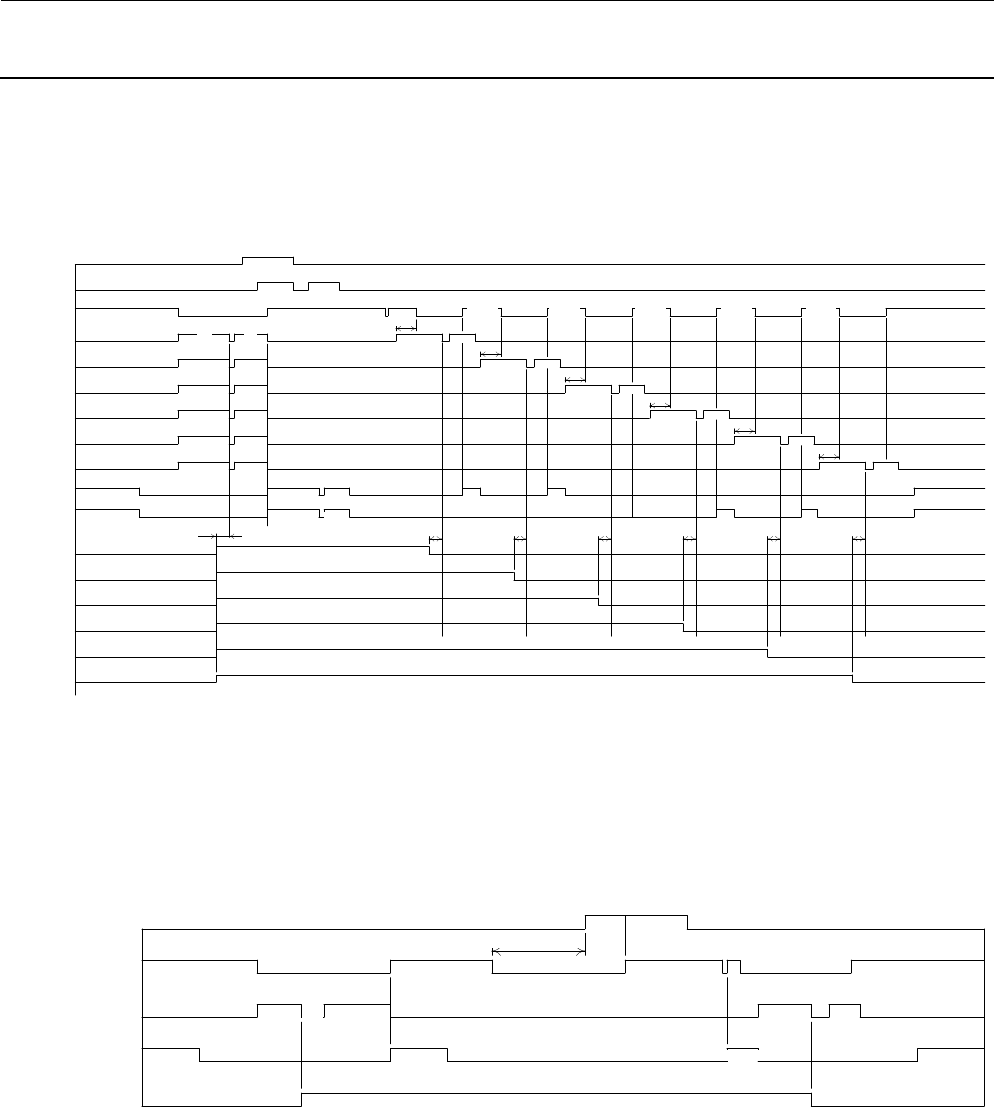
3-4-1 激光识别元件的安装流程
JX-100 LA認識 TF6本同時吸着
ドライブシリンダ
テープフィーダ
XY軸
Z軸-1
Z軸-2
Z軸-3
Z軸-4
Z軸-5
Z軸-6
θ軸-1
θ軸-4
VAC-1
VAC-2
VAC-3
VAC-4
VAC-5
VAC-6
吸着位置へ移動 停止
B
D
ON
OFF
ON
OFF
C
下降 上昇
Head1
搭載角度
LA計測
LA計測
Head4
搭載角度
C
下降 上昇
D
ON
OFF
C
下降 上昇
C
下降 上昇
C
下降 上昇
C
下降 上昇
D
ON
OFF
D
ON
OFF
D
ON
OFF
D
ON
OFF
ON
送り動作 戻り動作停止 停止
OFF
搭載位置へ移動
補正移動
搭載位置へ
移動
搭載位置へ
移動
搭載位置へ
移動
搭載位置へ
移動
搭載位置へ
移動
下降
下降
下降
下降
下降
下降
上昇
上昇
上昇
上昇
上昇
上昇
吸着
吸着
吸着
吸着
吸着
吸着
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
吸着回転
吸着回転
吸着回転
吸着位置へ移動
吸着回転
Head2
搭載角度
Head3
搭載角度
Head5
搭載角度
Head6
搭載角度
激光识别元件的贴装流程
3-4-2 VCS 识别元件的贴装流程
KE-2080 TR-5より吸着 VCS認識
VCS
XY軸
Z軸
θ軸
VAC
下降 吸着 上昇
吸着位置へ移動 停止
VCSへ移動
計測角度
180°
200(ダンピング待ち)
撮像 演算
搭載位置へ移動
補正移動
搭載回転
下降 上昇
ON OFFONOFF
吸着位置へ移動
吸着回転吸着回転
90°
VCS 识别元件的贴装流程
JX-200 LA 识别 TF6根同时吸附
驱动器缸筒
带送料器
XY 轴
Z 轴-1
Z 轴-2
Z 轴-3
Z 轴-4
Z 轴-5
Z 轴-6
轴-1
轴-4
向吸附位置移动
下降
下降
下降
下降
下降
下降
吸附
停止
吸附
吸附
吸附
吸附
吸附
上升
上升
上升
上升
上升
上升
吸取旋转
吸取旋转
向贴装位置移动
送料动作
停止 停止
返回动作
修正移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向吸附位置移动
下降
上升
下降 上升
下降 上升
下降 上升
下降
上升
下降 上升
吸取旋转
吸取旋转
LA 测定
LA 测定
Head1
贴装角度
Head4
贴装角度
Head2
贴装角度
Head3
贴装角度
Head5
贴装角度
Head6
贴装角度
JX-200 从托盘吸取 VCS识别
XY 轴
Z 轴
θ 轴
向吸
取
位
置
移动
停止
吸取
向 VCS 移动
向贴装位置移动
摄像 演算
校正移动
向吸取位置移动
下降
上升
下降 上升
吸取旋转
测量角度
贴装旋转
吸取旋转
200(等待卸料)
动作说明书
3-11
3-5 Z 轴动作
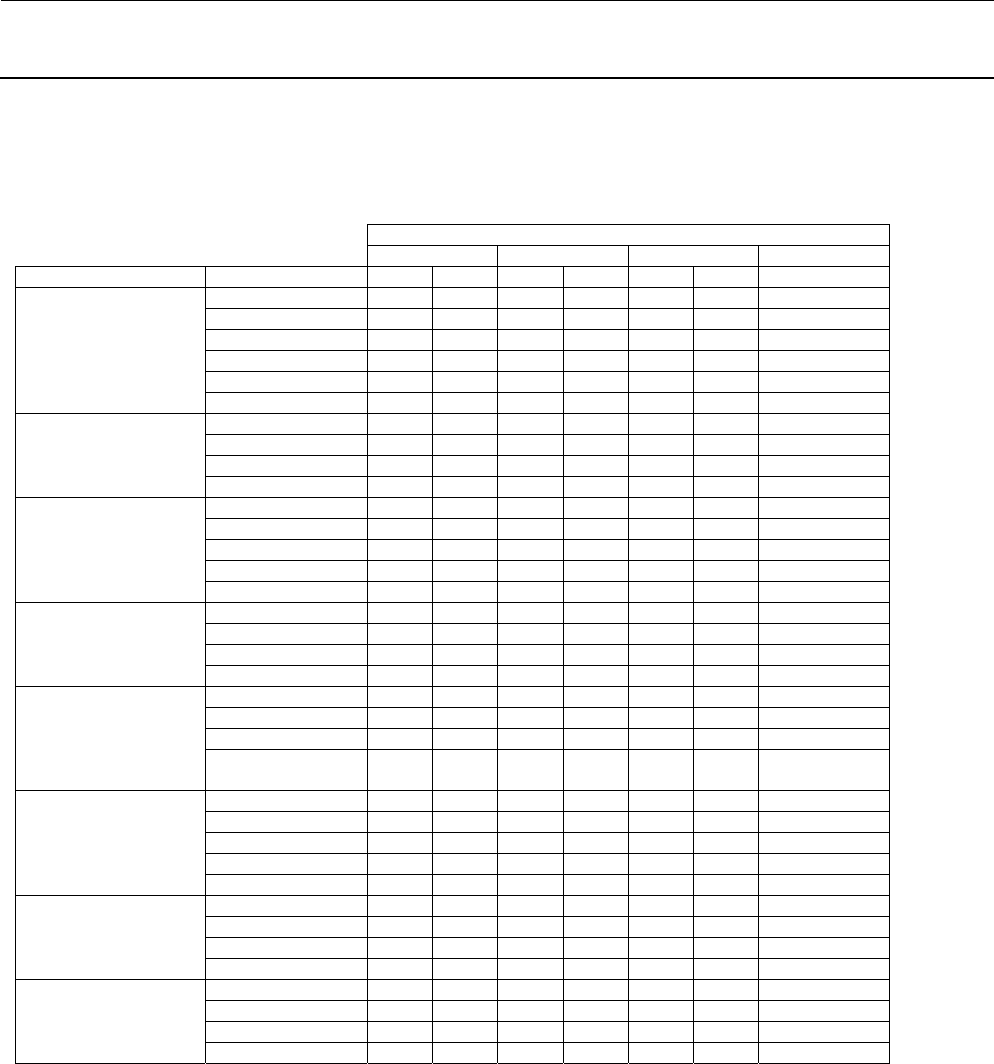
3-5-1 Z 轴的速度分类
中心为 LA 的轴、 轴的速度分类
Z轴、轴的速度分类
吸附时的Z轴 贴装时的Z轴 轴
元件种类 最小元件宽度 (W) 下降 上升 下降 上升 测定 测定外 典型的元件
方芯片
方芯片 (LED)
网络阻抗
Min ≦ W <0.45 高速 中速 高速 2 高速 2 高速 高速 0603
0.45 ≦ W <1.1 高速 2 高速 2 高速 2 高速 2 高速 高速 1005、1608
1.1 ≦ W ≦8.0 高速 2 高速 2 高速 2 高速 2 高速 高速 2012、3216
8 < W <20 高速 2 低速 高速 2 高速 2 高速 高速
20 ≦ W <Max 高速 2 低速 高速 2 高速 2 高速 低速
散件
Min ≦ W ≦8.0 高速 2 中速 高速 2 低速 高速 高速
8.0 < W <20 高速 2 低速 高速 2 低速 高速 高速
20 ≦ W <Max 高速 2 低速 高速 2 低速 高速 低速
SOT
Min ≦ W <1.1 高速 2 高速 2 高速 2 中速 高速 高速 Smini、SOT23
1.1 ≦ W ≦8.0 高速 2 高速 2 高速 2 中速 高速 高速
8.0 < W <20 高速 2 低速 高速 2 中速 高速 高速
20 ≦ W <Max 高速 2 低速 高速 2 中速 高速 低速
铝电解电容器
钽电容器
微调电容器、GaAsFET
插入元件
Min ≦ W ≦8.0 高速 2 高速 2 高速 2 低速 高速 高速
8.0 < W ≦20 高速 2 低速 高速 2 低速 高速 高速
20 < W <Max 高速 2 低速 高速 2 低速 高速 低速
QFJ(PLCC)、SOJ
J引脚插座
翅式插座
减震插座
单向引脚插头
Min ≦ W ≦8.0 高速 2 高速 2 中速 中速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 中速 低速 中速
20 < W <Max 高速 2 低速 中速 中速 低速 低速
SOP
TSOP、TSOP2
HSOP
双向引脚插头
Z导线连接器
Min ≦ W <5.0 高速 2 高速 2 中速 低速 中速 中速
5.0 ≦ W ≦8.0 高速 2 高速 2 中速 低速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 低速 低速 中速
20 < W <Max 高速 2 低速 中速 低速 低速 低速
QFP
QFN
BGA
BQFP(PGFP)
Min ≦ W ≦8.0 高速 2 高速 2 中速 中速 低速 中速
8.0 < W ≦20 高速 2 低速 中速 中速 低速 中速
20 < W <Max 高速 2 低速 中速 中速 低速 低速
其他
Min ≦ W ≦8.0 高速 2 高速 2 高速 2 高速 2 高速 高速
8.0 < W ≦20 高速 2 低速 高速 2 高速 2 高速 高速
20 < W <Max 高速 2 低速 高速 2 高速 2 高速 低速
动作说明书
3-12
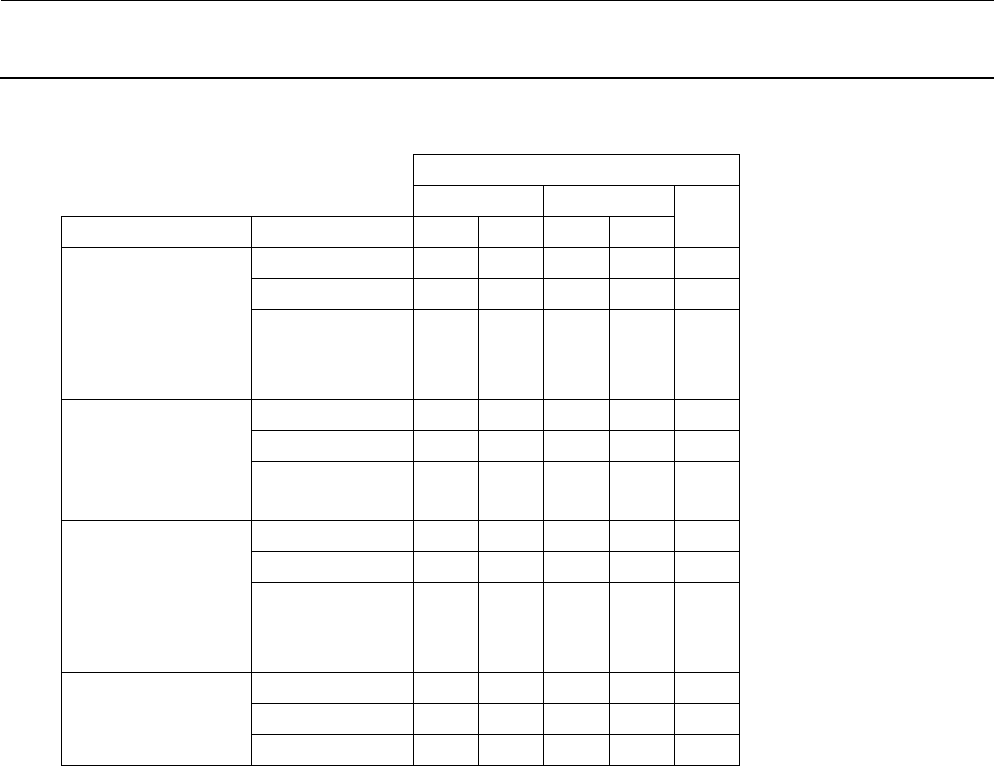
中心的 VCS 的轴、 轴的速度分类
Z轴、θ轴的速度分类
吸附时的 Z 轴 贴装时的 Z 轴
θ轴
元件种类 最小元件宽度 (W) 下降 上升 下降 上升
QFJ(PLCC)、SOJ
J 引脚插座
翅式插座
减震插座
单向引脚插头
Min≦ W ≦8.0 高速 2 高速 2 中速 中速 中速
8.0< W <20 高速 2 低速 中速 中速 中速
20≦ W <Max 高速 2 低速 中速 中速 低速
SOP、HSOP
TSOP、TSOP2
双向引脚插头
Z 导线连接器
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
20≦ W <Max 高速 2 低速 低速 低速 低速
QFP、QFN
BGA、FBGA
BQFP(PQFP)
外形识别元件
通用图形元件
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
20≦ W <Max 高速 2 低速 低速 低速 低速
铝电解电容器
钽电容器
微调电容器、GaAsFET
Min≦ W ≦8.0 高速 2 高速 2 低速 低速 中速
8.0< W <20 高速 2 低速 低速 低速 中速
20≦ W <Max 高速 2 低速 低速 低速 低速
注 1) 贴装时 Z 轴上升,元件高度为 4.7mm 以上时,无条件地变换成低速。
注 2) 护罩打开速度、 轴不设定,仅 Z 轴设定。但是 Z 轴移动中,护罩都不能变换。另外,吸附下降,
吸附上升,贴装下降,贴装上升的中速、低速的 2 阶段控制的护罩打开速度与高速一样为 1 阶段控
制。
注 3) 上述高速 2 为 GX-4 以前的机种编制的贴装程序的高速、把贴装程序新编制、旧机种的贴装程序变
换之后成为高速 2。