JM-10_动作说明书 - 第24页
动作说明书 3-14 3-5-2-2 吸附下降时的 Z 轴动作 根据元件识别方式 (LA、VCS)、有无元件检 测方式 (LA、真空), 分为 2 个行程分类(参 照下表) 右图表示行程分类 C。 行程分类 识别方式 LA E VCS C E 检测有无元件 LA 真空 1) 行程区分 C V C S 识别、 Va 检测 基板 XY VCS 识别元件用真空检测有无元件时, Z 轴的吸附上升为 XY 移动高度的上升。…
动作说明书
3-13
3-5-2 Z 轴的动作行程
各机种的XY移动高度,激光高度 (单位∶mm)
机种 原稿高规格 贴装头 XY 移动高度
激光高度 VCS 识别高度
基板上 除基板上以外
JM-10 25 LNC 31.0 31.0 42.5 28
Z轴驱动行程计算条件 (单位: mm)
元件厚度 h = 0.8
激光测定高度 t = 0.4
吸附压入量 0.2
贴装压入量 0.5
2 阶段控制高度 2.0
2 阶段控制高度(插入元件) 脚线长度
(注 1) 吸附压入量和贴装压入量将上表作为初始值,元件数据可以变更。
(注 2) 吸附下降·吸附上升·贴装下降·贴装上升个别元件数据可以分高速·中速·低速·低速 2 进行
设定。
(注 3) 吸附下降·吸附上升·贴装下降·贴装上升、分中速、低速·低速 2,2 阶段设定。
(注 4) 2 阶段控制高度将上表作为初始值,可以在机械控制参数变更。
(注 5) 通过激光进行零件检测的高度,LA 识别零件时为激光测量高度、VCS 识别零件时为 h/2。
(注 6) 吸附元件后、贴装前是通过 LA 确认有无元件,故有时不反映 XY 移动高度
。
(注 7) 2 阶段控制高度(插入元件)将上表作为初始值,在 MS 参数中可以对使用、不使用进行变更
。
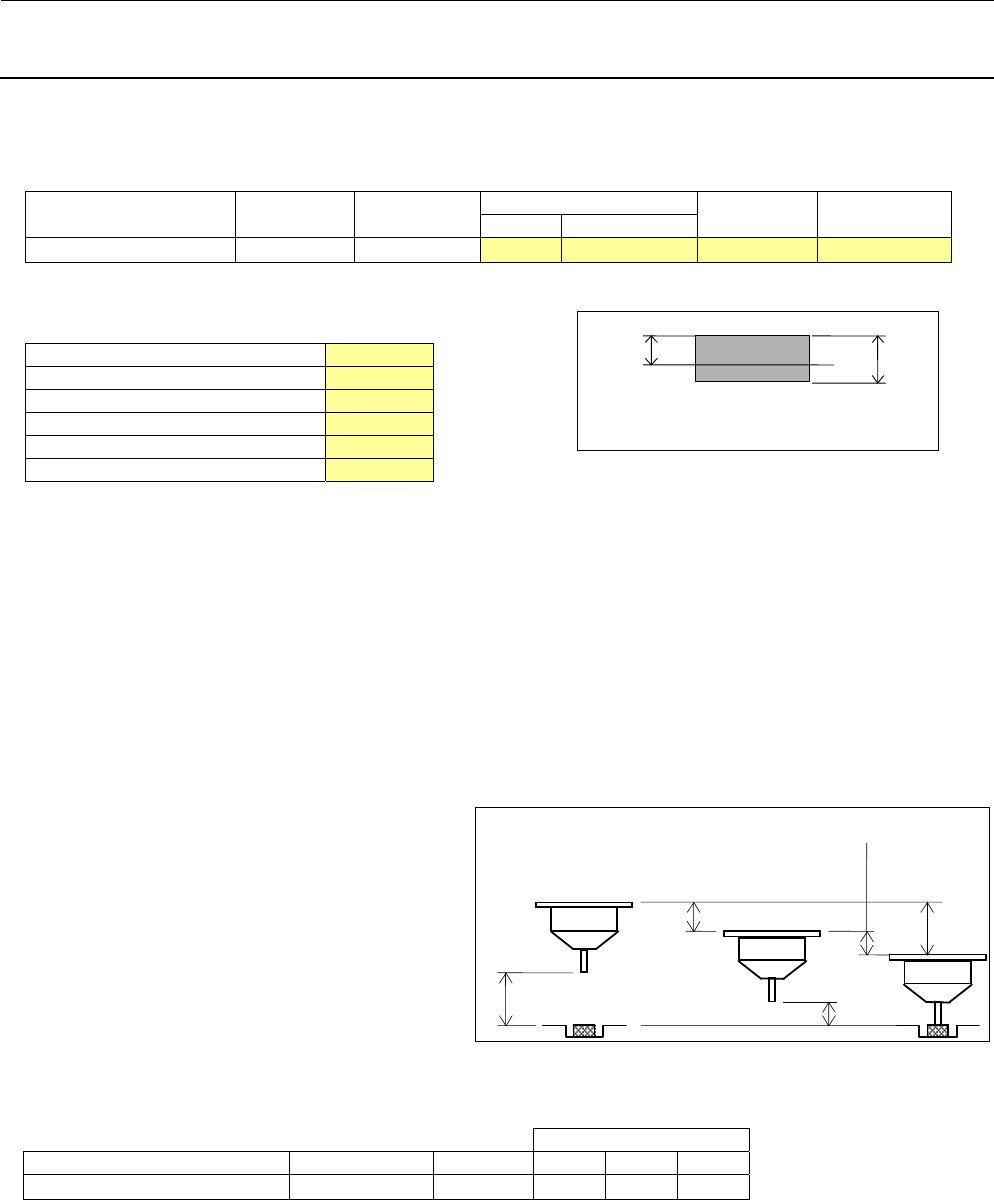
3-5-2-1 吸附下降时的 Z 轴动作
元件识别方式(行程与 LA、VCS 无关)
1) 行程分类 A LA、VCS 识别
Z 轴的吸附下降为从 XY 移动高度下降。
移动量 A=XY 移动高度 吸附压入量
移动量 A1=XY 移动高度 2
移动量 A2=2 吸附压入量。
吸附下降
机种 元件高度规格 贴装头
A A1 A2
JM-10 25 LNC 31.2 29.0 2.2
t
h
h: 元件厚度
t: 激光测定高度
A1
A2
A
2
待机高度
吸附高度
动作说明书
3-14
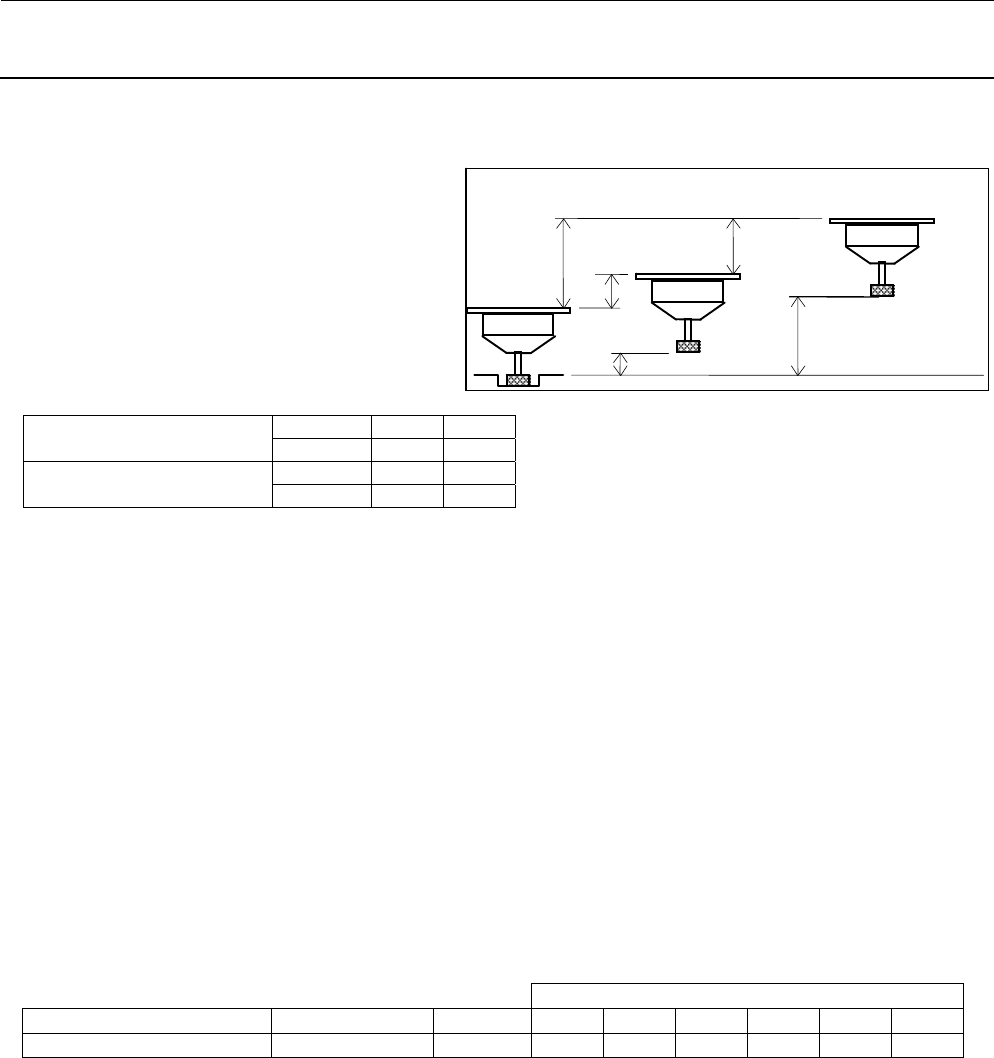
3-5-2-2 吸附下降时的 Z 轴动作
根据元件识别方式 (LA、VCS)、有无元件检
测方式 (LA、真空), 分为 2 个行程分类(参
照下表)
右图表示行程分类 C。
行程分类
识别方式
LA
E
VCS C E
检测有无元件
LA
真空
1) 行程区分 C VCS识别、Va 检测 基板 XY
VCS 识别元件用真空检测有无元件时,Z 轴的吸附上升为 XY 移动高度的上升。
移动量 C=XY 移动高度 h 吸附压入量
移动量 C1=2 吸附压入量 h
移动量 C2=XY 移动高度 2
2) 行程区分 E LA识别、LA 检测 基板 LA
LA 识别元件,用 LA 检测有无时 Z 轴的吸附上升到激光高度。
移动量 E=激光高度 吸附压入量 t
移动量 E1=2 吸附压入量 h
移动量 E2=激光高度 2 t
3)
Z 轴行程
吸附上升
机种 元件高度规格 贴装头
C C1 C2 E E1 E2
JM-10 25 LNC 32.0 3.0 29.0 43.1 3.0 40.1
C1
C
C2
2
吸附高度
待机高度
动作说明书
3-15
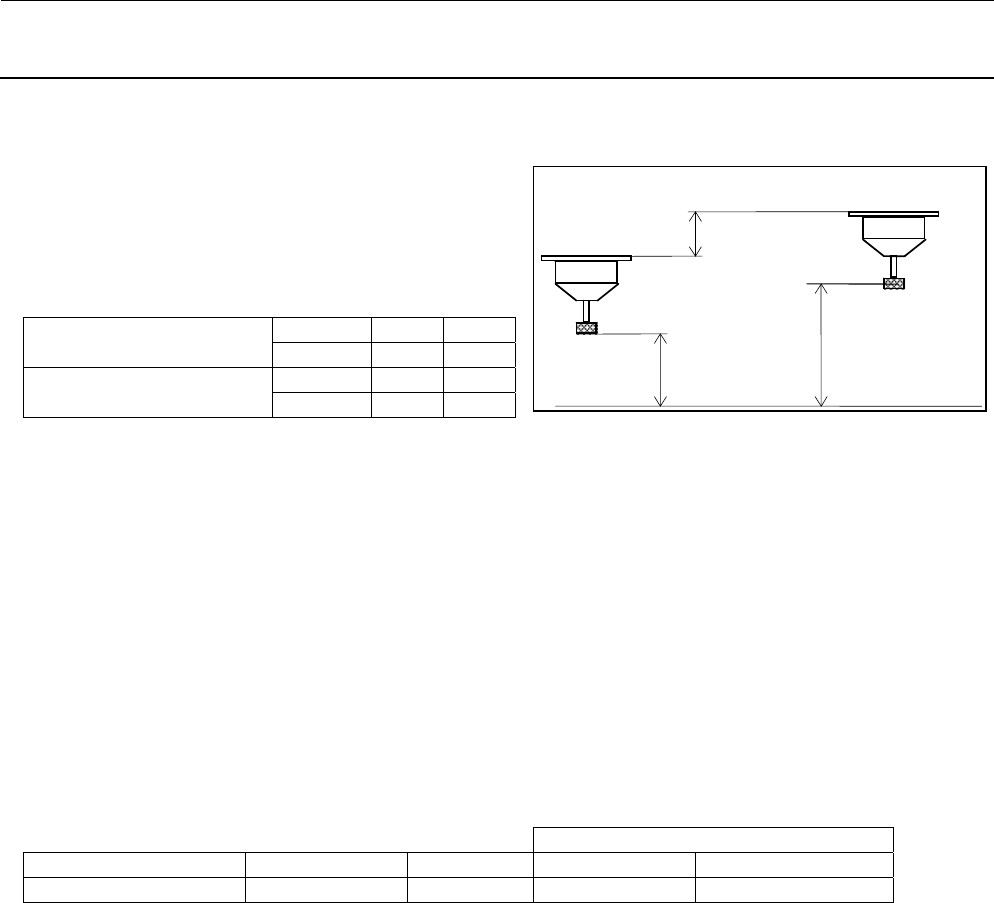
3-5-2-3 LA 的元件识别时的 Z 轴动作
VCS 识别元件检测真空元件 NG 时,为了用 LA 识
别,追加 2 个行程分类。(参照下表)
右图为行程分类 M。
行程分类
识别方式
LA
VCS M I
有无元件的检测
LA
真空
1) 行程分类 M VCS识别、LA 检测 XY LA
VCS 识别元件,用真空检测有无元件为 NG 时,为了用 LA 检测有无元件,Z 轴识别上升从 XY 移动
高度上升。
移动量 M=激光高度 - h/2 - XY移动高度
2) 行程分类 I VCS识别、LA 检测 LA XY
VCS 识别元件,用 LA 检测有无元件后的 Z 轴识别下降,为激光高度开始下降。
移动量 I=激光高度 - h/2 - XY移动高度
3) Z 轴行程
吸附下降
机种 元件高度规格 贴装头 M I
JM-10 25 LNC 14.1 14.1
M
待机高度
识别高度