JM-10_动作说明书 - 第35页
动作说明书 3-25 3-6 芯片跳起检测 3-6-1 概要 进行芯片检测的时间是,吸附后, XY 开始移动和同时进行的激光测定后进行。芯片跳起检测是把 Z 轴 移动到被吸附的元件厚度计算出的高度, 用激光进行扫描, 来判定有无检测出的元件。 除实施芯片跳起检 测之外,还可以用元件数据或后备数据来选择。进行芯片跳起检测之后,有可能发生因 XY 的移动距离、 吸附方法等造成循环周期推迟的现象。 3-6-2 判定方法 芯片跳起检测主要适用于…
动作说明书
3-24
(1) 轴动作速度·加速度
激光测定时的轴转速和加速度
LA 测定中
高速 中速度 低速 低速 2
LNC-HEAD 角速度(kpps) 720 372 200 -
对高速比(%) 72 37.2 20 -
角加速度(kpps2) 30000 5316 1536 -
对高速比(%) 50 8.86 2.56 -
激光测定外的轴动作速度·加速度
LA 测定外
高速 中速度 低速 低速 2
LNC-HEAD 角速度(kpps) 1000 600 200 100
对高速比(%) 100 60 20 10
角加速度(kpps2) 60000 30000 1200 600
对高速比(%) 100 50 2 1
中心VCS时轴动作速度·加速度
VCS
高速 中速度 低速 低速 2
LNC-HEAD 角速度(kpps) 1000 600 200 100
对高速比(%) 100 60 20 10
角加速度(kpps2) 60000 30000 1200 600
对高速比(%) 100 50 2 1
(2) 轴其他动作
原点复位的 轴转速·加速度规定如下。
原点复位时的速度·加速度与护罩开放,护罩关闭无关。
原点复位
LNC-HEAD 角速度(kpps)
200
对高速比(%) 20
角加速度(kpps2) 1200
对高速比(%) 2
(注)不吸附元件的适用低速。
步骤移动时的速度和加速度规定如下。
步骤移动时的速度和加速度与护罩开放,护罩关闭无关。
步骤
高速 微速
LNC-HEAD 角速度(kpps) 250 100
对高速比(%) 25 10
角加速度(kpps2) 15000 9000
对高速比(%) 25 15
动作说明书
3-25
3-6 芯片跳起检测
3-6-1 概要
进行芯片检测的时间是,吸附后,XY 开始移动和同时进行的激光测定后进行。芯片跳起检测是把 Z 轴
移动到被吸附的元件厚度计算出的高度,用激光进行扫描,来判定有无检测出的元件。除实施芯片跳起检
测之外,还可以用元件数据或后备数据来选择。进行芯片跳起检测之后,有可能发生因 XY 的移动距离、
吸附方法等造成循环周期推迟的现象。
3-6-2 判定方法
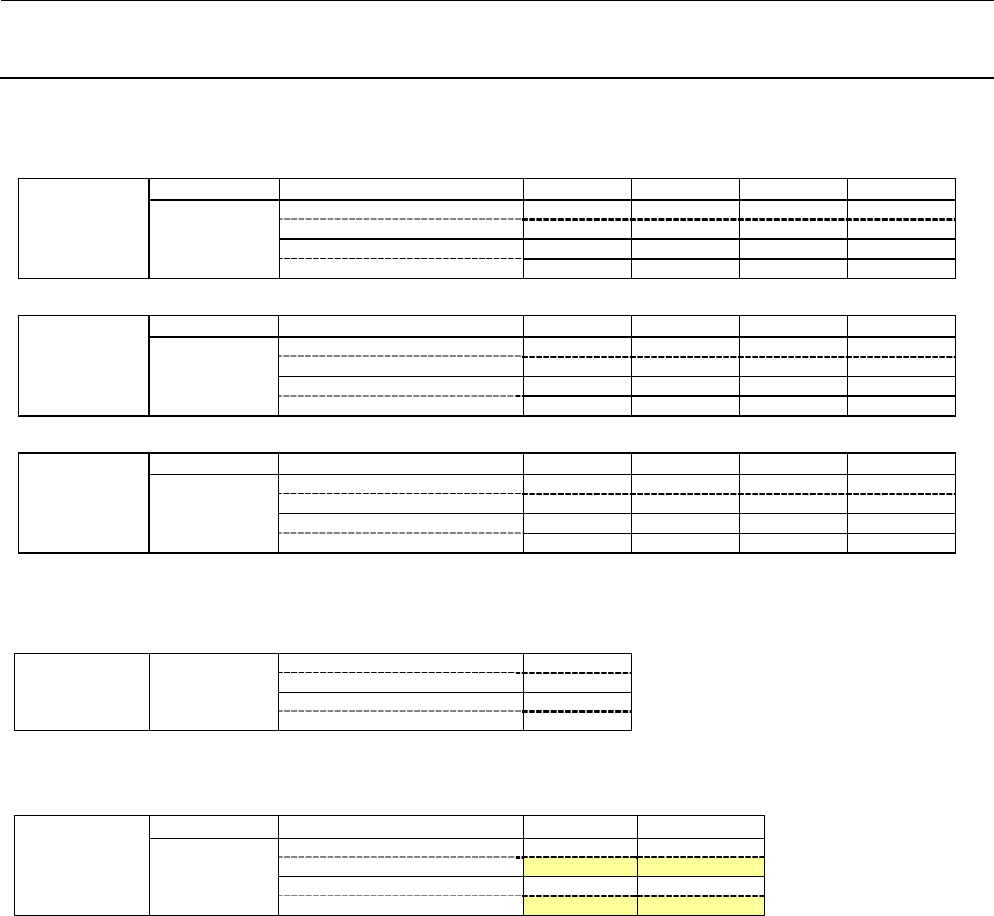
芯片跳起检测主要适用于方芯片、散件,按照元件尺寸将下表的系数(A)乘以元件数据内输入的元件
厚度 t,求得的值作为激光高度进行扫描。
正常吸附时,Status 0(NO Component)作为数据被反馈,但是芯片跳起状态,因为激光遮掩元件,0 以
外的 Status 被反馈,此时判定为芯片跳起,退出芯片。
系数1.25的理由如下。
1005电阻时,元件尺寸 t=0.35、W=0.5mm,检测横跳起吸附的高度定为下图风习的中央时,距
离1.25× t 较近,因此为(0.35+0.5)/2≒1.25×0.35 。
短边尺寸 系数 主要元件
0.45 以上 1.25 2012、1608 元件
0.25 以上、不足 0.45 1.20 0603 元件
正常吸着 横立ち 縦立ち 斜め立ち
A×T
正常吸附 横跳起 纵跳起 斜跳起
元件尺寸
动作说明书
3-26
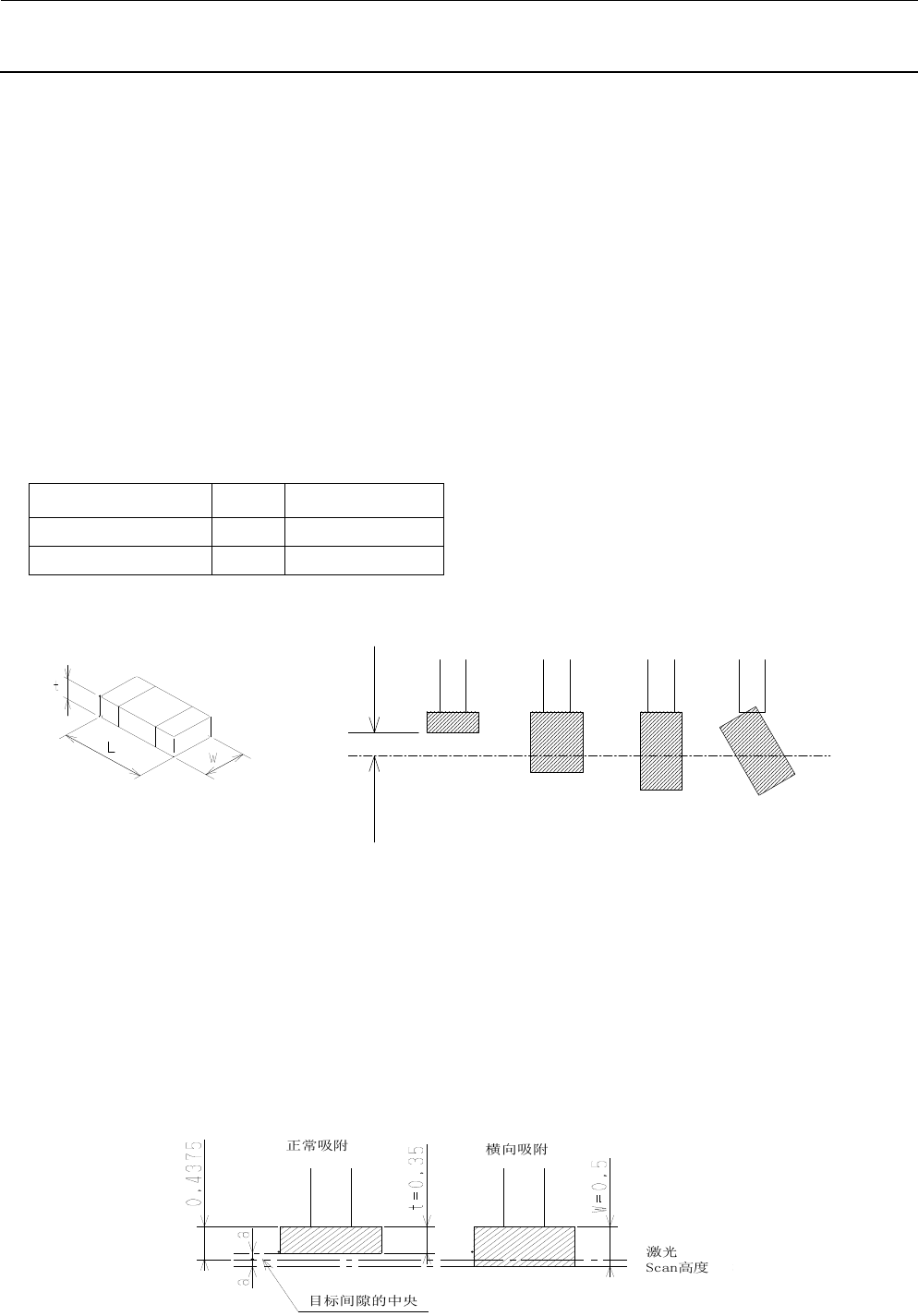
1)如果元件高度的输入值与实际尺寸不同时,虽然能正常吸附但是也被退出。
2012 R 时,t=0.6mm,芯片跳起Scan高度为0.6×1.25=0.75。
如果元件高度被错误地输入为0.4mm的话,Scan高度为0.5mm(0.4×1.25),虽然能正常虚浮,
但是也被判定为跳起,此时必须通过自动测量元件高度来输入真值。
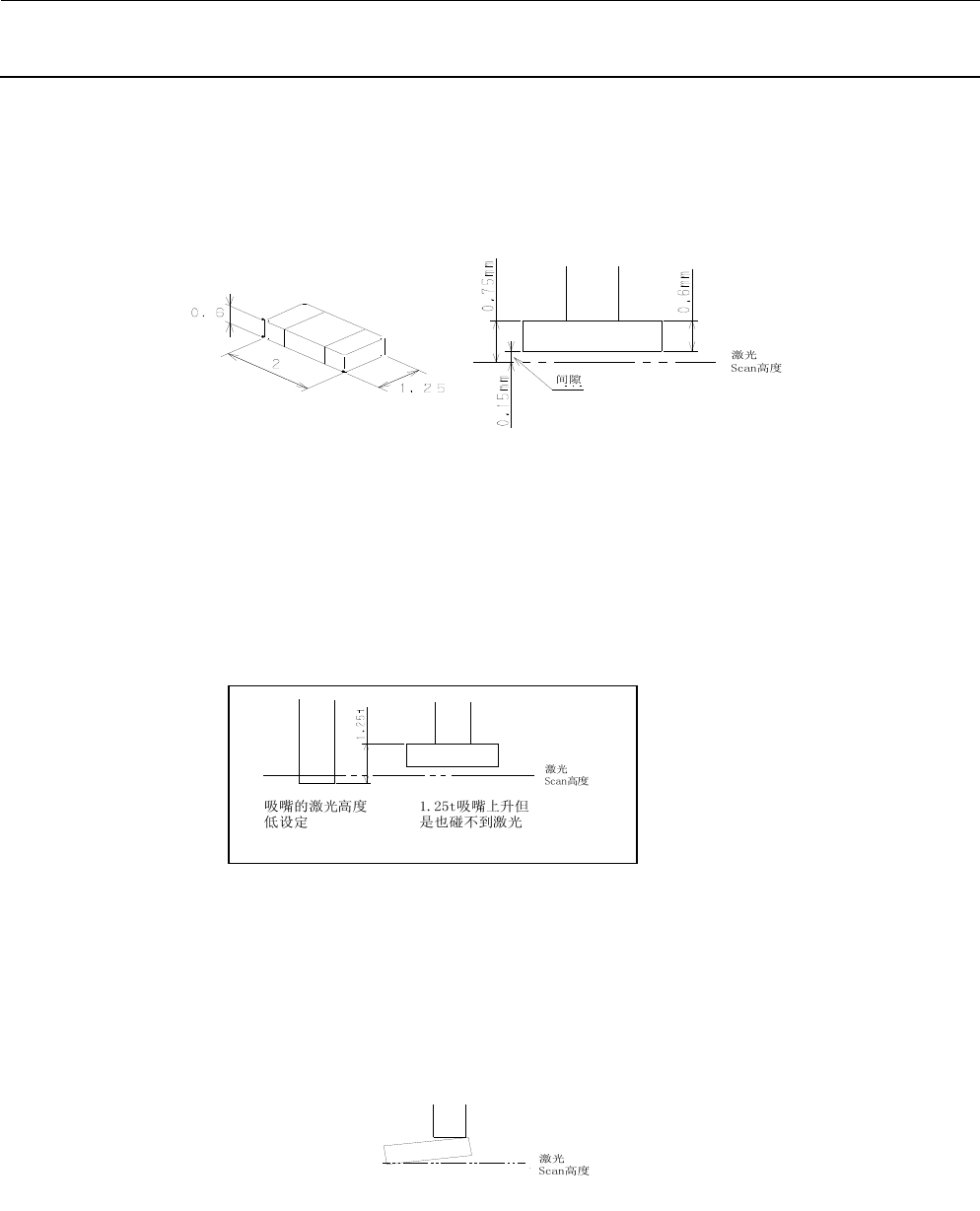
2) 吸嘴的激光高度不同时,虽然能正常吸附,但是也判定为跳起。
把吸嘴的激光高度(Set-up 数据)设定为比正常位置低的话,此 Scan 高度就检测为能正常吸附。
此时,在各贴装头取得了维修模式的激光高度,请重新用安装数据的吸嘴分配方法取得吸嘴高度数据。
3) 有时因元件的吸附状态,被判定为跳起。例如,2012R时,元件下面和Scan高度的间隙为0.15 mm
时,检测为倾斜吸附状态,因而被退出。
此时因为固定位置有问题,需要进行纠正。
由于芯片跳起检测高度可以在各元件的元件数据中改变设定值,因而有些尺寸的元件也能够再倒向安全
侧。