JM-10_动作说明书 - 第5页
动作说明书 1-1 1 电气部 1-1 电气部的布局 1-1-1 各部的名称 1. 图像用监视器 2. 信号灯 3. LCD 监视器 4. HOD 5. 操作盘 〔前: LCD 监视器、 START 开关、 S T O P 开关、 ORIGIN 开关、紧急停止开关〕 〔后:紧急停止开关〕 6. 贴装头装置 〔贴装头主基板组、贴装头中转基板组、 Z / θ 轴伺服放大器、 HMS 〕 7. OCC 、垂直照明基板组 、 角度照明基板 8.…

动作说明书
3-7-2 吸附时的真空同步时间 ............................................................................................................................................. 3-29
3-7-3 贴装时的真空同步时间 ............................................................................................................................................. 3-30
3-7-4 向废弃箱之外废弃元件时的真空同步时间 ...................................................................................................... 3-31
3-8 激光识别动作 .......................................................................................................................................................................... 3-32
3-9 激光识别异常 .......................................................................................................................................................................... 3-35
3-10 送料器的驱动 ........................................................................................................................................................................ 3-37
3-11 VCS 识别动作 ........................................................................................................................................................................ 3-40
3-11-1 部元件图像识别,贴装动作时间曲线 ............................................................................................................. 3-41
3-11-2 照明动作说明 .............................................................................................................................................................. 3-42
3-11-3 各照明装置的最大电流值 ...................................................................................................................................... 3-44
3-11-4 元件分类的照明默认值 ........................................................................................................................................... 3-45
3-11-5 实效元件外形尺寸 .................................................................................................................................................... 3-46
3-12 BOC 标识识别 ........................................................................................................................................................................ 3-47
3-12-1 动作时间 ........................................................................................................................................................................ 3-47
3-12-2 识别顺序 ........................................................................................................................................................................ 3-48
3-12-3 指定标记的修正方法 ............................................................................................................................................... 3-49
3-12-4 OCC(Offset Correction Camera)的说明
..................................................................................................... 3-52
4 人机器部的说明 ............................................................................................................................................................................. 4-1
4-1 人机部的构成 ............................................................................................................................................................................. 4-1
4-2 人机部的功能 ............................................................................................................................................................................. 4-1
5 机器控制部的说明 ........................................................................................................................................................................ 5-1
5-1 各基板的功能 ............................................................................................................................................................................. 5-2
5-1-1 CPU 基板.............................................................................................................................................................................. 5-2
5-1-2 POSITION 控制板 ............................................................................................................................................................. 5-4
5-1-3 IEEE1394A 板 ..................................................................................................................................................................... 5-4
5-1-4 IO MI 基板 ............................................................................................................................................................................ 5-4
5-1-5 BASE 基板 ........................................................................................................................................................................... 5-7
5-1-6 贴装头主基板 .................................................................................................................................................................... 5-9
5-1-7 IP-X5 基板 ........................................................................................................................................................................ 5-12
5-1-8 LIGHT CTRL 基板 .......................................................................................................................................................... 5-13
5-1-9 DRV-IO 基板.................................................................................................................................................................... 5-14
5-2 马达的控制方式 ..................................................................................................................................................................... 5-15
5-2-1 XY 轴的控制方式........................................................................................................................................................... 5-15
5-2-2
Z,θ 轴的控制方式 .................................................................................................................................................... 5-16
5-2-3 传送带部的控制 ............................................................................................................................................................ 5-17
6 故障处理 ........................................................................................................................................................................................... 6-1
6-1 元件贴装 ....................................................................................................................................................................................... 6-1
动作说明书
1-1
1 电气部
1-1 电气部的布局
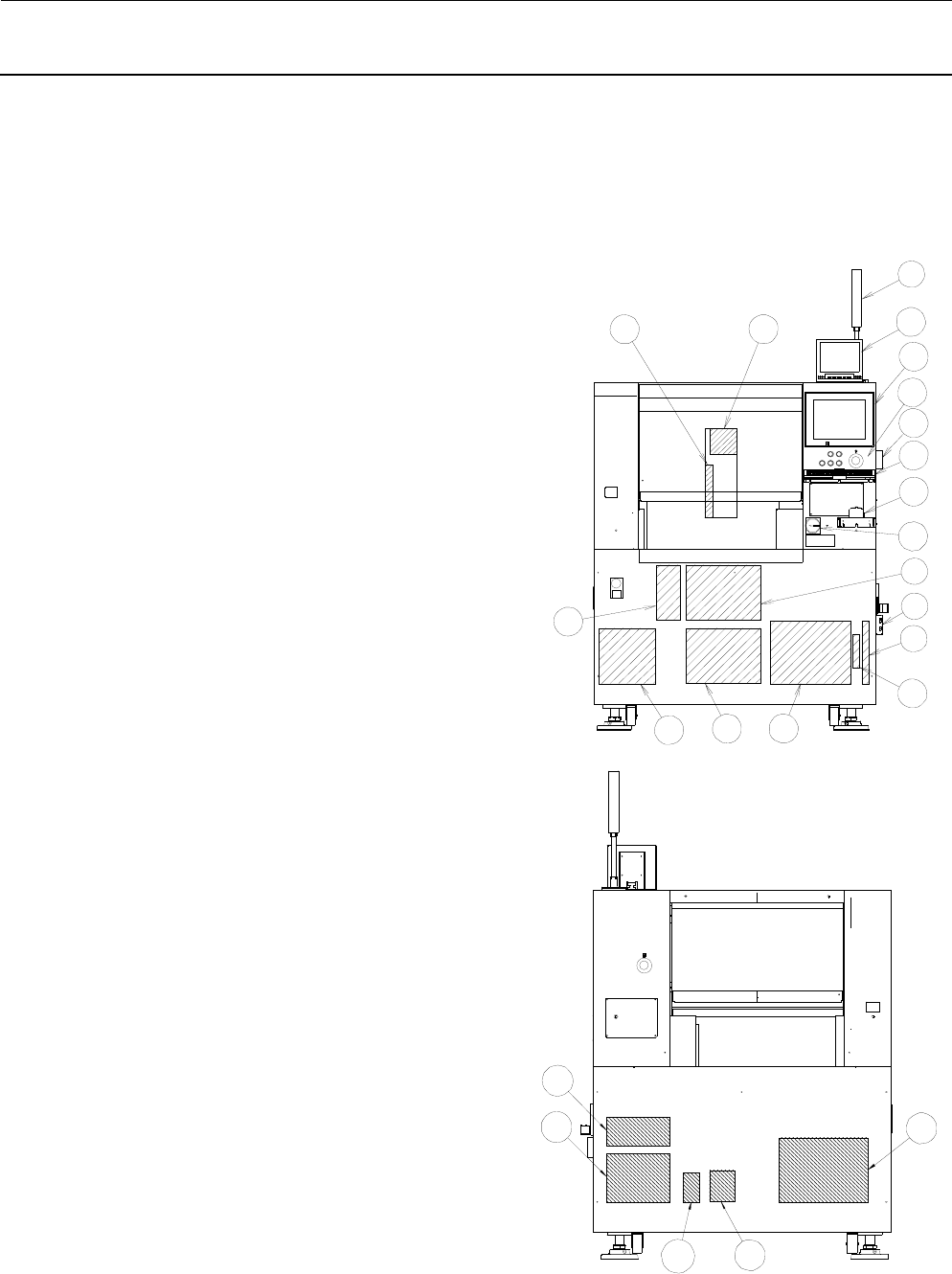
1-1-1 各部的名称
1. 图像用监视器
2. 信号灯
3. LCD 监视器
4. HOD
5. 操作盘
〔前:LCD 监视器、START 开关、
STOP开关、ORIGIN 开关、紧急停止开关〕
〔后:紧急停止开关〕
6. 贴装头装置
〔贴装头主基板组、贴装头中转基板组、
Z/θ轴伺服放大器、HMS〕
7. OCC、垂直照明基板组、角度照明基板
8. 鼠标
9. 键盘
10. 电源开关
11. SSD
12. 控制器
〔CPU 接口、定位板、IEEE1394A 电路板、
IO MI基板、IP-X5 基板〕
13. XY 轴 AC 伺服放大器
14. 真空泵
15. USB 端子
16. BASE 电路板
17. 传送用 5 相步进电动机驱动器
〔传送电动机 L 用,传送电动机中央用,传送电动机 R 用〕
18. DRV-IO 电路板
19. 电源变压器
20. 端子台
21. 电源装置
22. 断流器
23. 安全电路装置(仅限 EN 机)
主体正面图
1
3
5
6 7
8
9
10
11
12 13
14
15
2
16
17
4
18
主体背面图
19
21
20
22
23

动作说明书
2-1
2 各驱动轴(X,Y,Z,θ 轴)的说明
2-1 Y 轴
本轴是进行元件贴装头向 Y 轴方向(从装置正面看是从内部向身前、从身前向内部驱动)驱动的轴。
驱动用的电动机安装在右侧,由悬臂滚珠螺杆驱动而动作,对于位置控制,是通过只利用电动机之编码器
的半闭环控制来进行动作。
2-1-1 组成
・
减速比 1:1
・
平均马达 1 圈的移动量为 32mm(滚珠螺杆螺距)
2-1-2 性能
用于 Y 轴驱动的电动机的性能如下表所示。
项目 规格 备注
电动机 额定输出 2000[W]
额定转速 3000[r/min]
最大转速 4500[r/min]
编码器分辨率 262144[pulse/rev]
编码器输出 三菱串行
通过伺服放大器参数的电子齿轮设定,指令 1 脉冲的移动量被设定为 1μm。(电子齿轮:262144/32000)
电动机输出 1500W
滚珠螺杆 联轴节
电动机