JM-10_动作说明书 - 第57页
动作说明书 3-47 3-12 BOC 标识识别 3-12-1 动作时间 识别 BOC 标识时的 XY 轴动作和识别装置的动作时间如下所示 。 ① 开始可 BOC 识别动作之后,在 BOC 标记识别位置,开始 XY 轴的移动之后,向识别装置发送 BOC 摄像 机的变换指令 。 此时 BOC 灯也亮灯 。 ② 向 BOC 标记识别位置移动完了之后,发送识别装置的 BOC 标记识别指令 。 ③ 有的识别装置,接收了识别装置来的标记图像读取完…
动作说明书
3-46
3-11-5 实效元件外形尺寸
所谓元件数据的元件卫星尺寸,是另外定义实效元件外形尺寸。
实效元件外形尺寸指实效元件外形尺寸转动元件后看到的外形尺寸。
这是考虑了识别偏差(吸附位置和元件外形中心位置的偏差)后的值。
贴片机的生产部,通过元件外形尺寸、吸附样子、贴装角度、分割数、识别偏差、照明种类的条件组合、
动态地改变吸附、贴装时的识别样子控制。
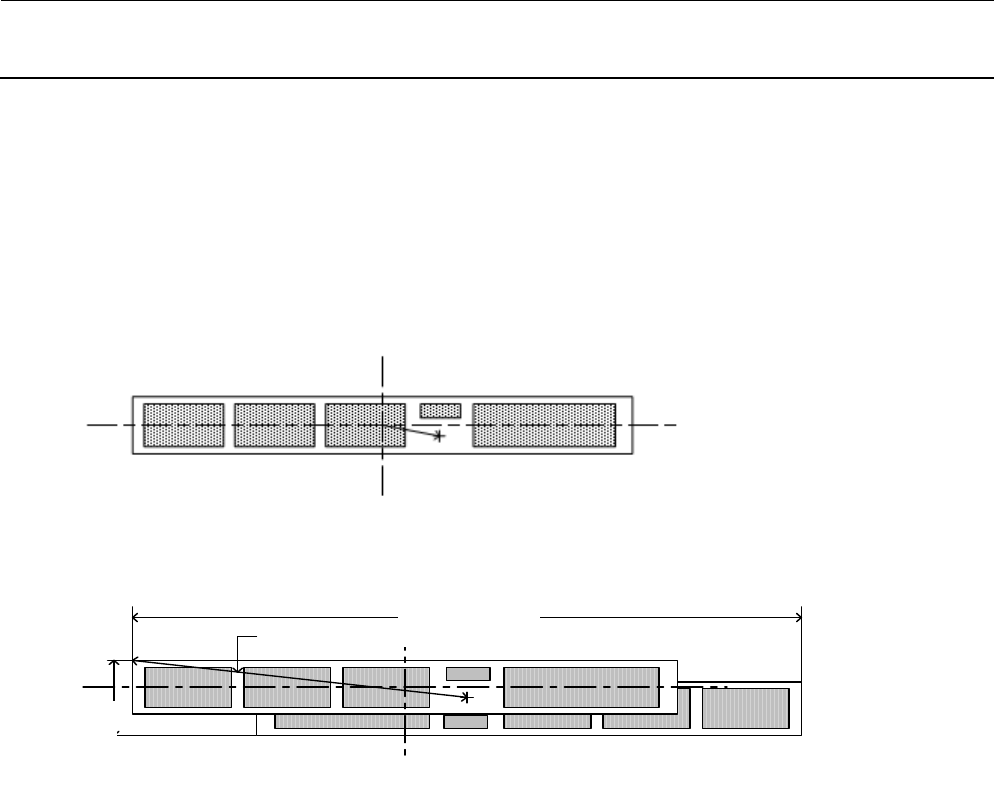
下图表示空孔的外形识别元件的各部尺寸。
姿勢0°
姿勢180°
部品姿勢と実効部品対角寸法、実効部品長辺寸法、実効部品短辺寸法
実効部品
短辺寸法
実効部品長辺寸法
実効部品対角寸法
实效元件
短边尺寸
样子
实效元件对角尺寸
元件样子和实效元件对角尺寸,实效元件长边尺寸,实效元件短边尺寸
元件外形中心和识别(吸附)偏差
样子
实效元件长边尺寸
动作说明书
3-47
3-12 BOC 标识识别
3-12-1 动作时间
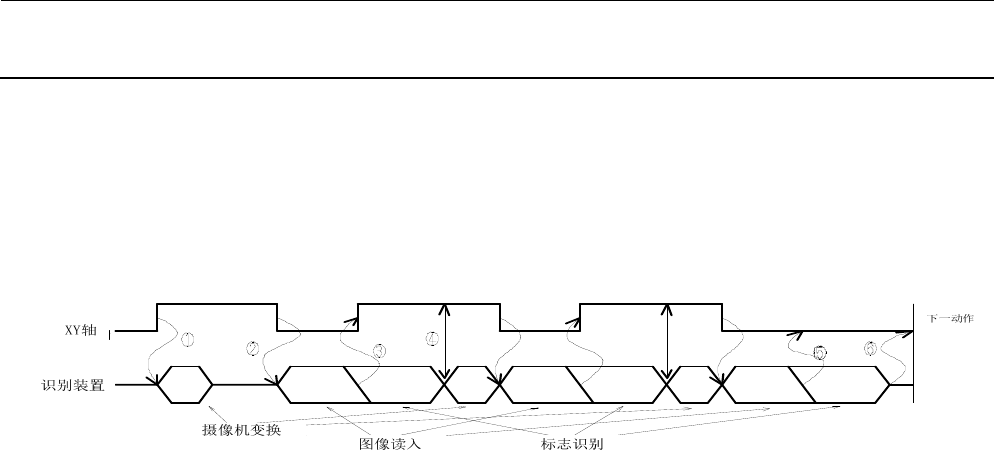
识别BOC标识时的XY轴动作和识别装置的动作时间如下所示。
① 开始可BOC识别动作之后,在BOC标记识别位置,开始XY轴的移动之后,向识别装置发送BOC摄像
机的变换指令。此时BOC灯也亮灯。
② 向BOC标记识别位置移动完了之后,发送识别装置的BOC标记识别指令。
③ 有的识别装置,接收了识别装置来的标记图像读取完了之后,将 XY 轴移动到下一个识别位置。此时,
识别装置继续进行识别处理。
④ 接收到识别装置来的识别结果之后,再次发送摄像机变换指令。直到最后的BOC标记,反复②~④,
当接收到最后的BOC标记图像读取完了的信息之后,熄灭BOC灯。
⑤ 待机接收最后的从识别装置送来的BOC标记识别结果,进行下一动作。
动作说明书
3-48
3-12-2 识别顺序
识别BOC标记的顺序,根据各基板的BOC标记和根据各电路的BOC标记,顺序如下。
根据各基板的BOC标记
按照基板数据显示的 BOC 位置 No.1、No.2、No.3 的顺序,进行 BOC 标记的识别。
根据各电路的BOC标记
从电路号码1开始对各电路按照和基板各 BOC 标记相同的顺序,进行 BOC 标记识别,当电路上所有的
BOC 标记识别结束之后,按照电路号码的上升顺序进行下一电路的 BOC 识别处理。
另外,检测出坏标记的电路跳过处理,进行下一电路的处理。
非矩阵基板时的电路号码为基板数据输入电路配置输入的号码的顺序。
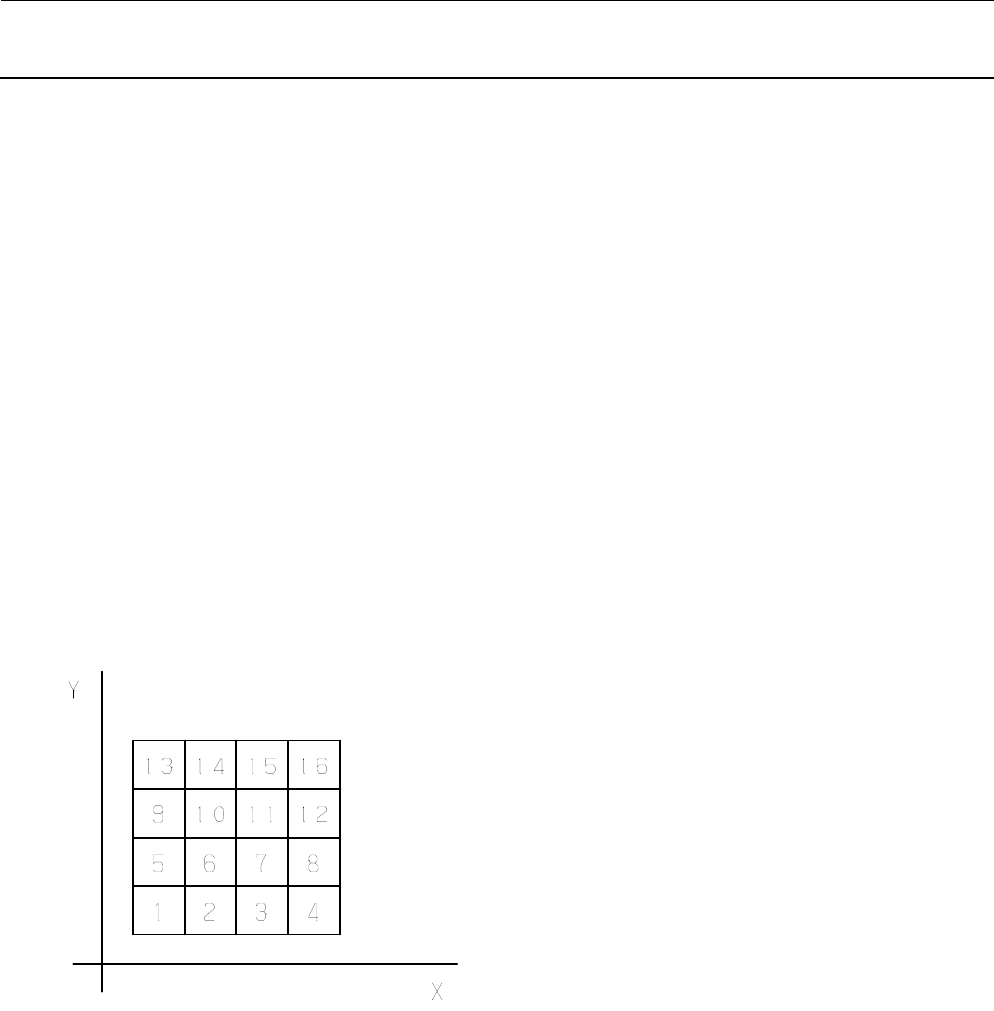
矩阵缉办时的电路号码,从 X 轴的机械原点侧的电路的 X 坐标增加方向的顺序,从 Y 轴机械元件线 Y 坐
标增加的方向反复进行。4×4矩阵基板时,如下图所示那样的电路号码。