JM-10_动作说明书 - 第69页
动作说明书 5-5 IO MI 基板上安装 2 个 Dip 开关。以下是各开关的意义。 1 O N 2 3 4 5 6 7 8 SW1 パ ターン 及び 機能R EV.設定用 Bi t 1 ~Bi t4 :機能R EV. Bi t 5 ~Bi t6 :パ タ ー ンREV. 設定は、 IO M I PC B AS M R EVISIO N NO T E を 参照の こと 。 1 O N 2 3 4 5 6 7 8 SW2 機能設定用 B…

动作说明书
5-4
5-1-2 POSITION 控制板
POSITION 控制板经由 SSCNETⅢ(三菱电机制造的控制通信网络),是与控制伺服电动机的 CPCI 总线对
应的电路板。控制最多 32 轴的电动机。
① 接受来自 CPU 电路板的指令,控制 XYZθ 伺服电动机。
② 进行各轴的原点传感器及限位传感器的检测。
③ 进行伺服驱动器的报警检测。
④ 进行紧急停止的检测,使 XY 轴、Zθ 轴停止。
5-1-3 IEEE1394A 板
IEEE1394A 板通过 IEEE1394a-2000 规格的通信,是与控制 LNC60 的 CPCI 对应的电路板。并且还经过该板
卡向 LNC60 进行电源供给。
5-1-4 IO MI 基板
① 检测紧急停止开关、限制传感器、护罩开放开关,遮断伺服电源。
② 检测 XNEAR 传感器、YNEAR 传感器,通知 POSITION 基板。
③ 通过与 BASE 电路板的 I/F 回路,对传送带的传感器和电磁阀、ATC 的传感器和电磁阀、驱动气
缸电磁阀、支承台的传感器和电磁阀的信号进行发送和接收。
④ 实装 2 个 2 轴脉冲控制器 IC,根据来自 CPU 板的指令进行传送 L 电动机、传送中央电动机、传送 R
电动机的脉冲控制。
⑤ 通过与 HEAD MAIN 电路板的 I/F 回路,对真空/送风、Z 轴接近传感器、真空压力传感器、HMS、
OCC 照明控制信号等进行发送和接收。
⑥ 保存 M/S 参数的 FlashROM。
⑦ 通过与 LIGHT CTRL 电路板的 I/F 回路,对 VCS 照明控制信号等进行发送和接收。
⑧ 通过与 RV-IO 电路板的 I/F 电路,进行径向送料器电磁阀以及碗式送料器的电动机驱动、电磁阀
、传感器信号等的发送和接收。
IO MI 基板上安装 7 个 LED。以下是各 LED 的意义。
LD1(红):内部时标稳定的情况下亮灯。
LD2(红):因检测到紧急停止、极限、护罩打开等警报而亮灯。
LD3(红):检测到正面侧送料器浮起時亮灯。
LD4(红):检测到背面侧送料器浮起時亮灯。
LD5(红):生产模式(维护键卧倒)时亮灯
。
LD6(红):检测到正面侧护罩打开時亮灯。
LD7(红):检测到背面侧护罩打开時亮灯。
另外,在控制装置插入状态下,从上开始以 L1~L7 的顺序实装。

动作说明书
5-5
IO MI 基板上安装 2 个 Dip 开关。以下是各开关的意义。
1
O
N
2
3
4
5
6
7
8
SW1
パターン及び機能REV.設定用
Bit1~Bit4:機能REV.
Bit5~Bit6:パターンREV.
設定は、IO MI PCB ASM REVISION NOTE
を参照のこと。
1
O
N
2
3
4
5
6
7
8
SW2
機能設定用
Bit1:ON時リア側カバーオープン有効
Bit2:ON時フロント側フィーダ浮きセンサ有効
Bit3:ON時リア側フィーダ浮きセンサ有効
Bit4:ON時POWER MONITOR(CE)有効
Bit5:ON時カバーオープンで強制サーボOFF(メンテナンスSW OFF時)
カバーオープンで軸スロー動作(メンテナンスSW ON時)
Bit6:ON時フィーダ浮き検出で強制サーボOFF
Bit7;OFF固定(予備)
Bit8;OFF固定(予備)
1
O
N
2
3
4
5
6
7
8
SW2
1
O
N
2
3
4
5
6
7
8
SW2
・ST、JE、CH仕様
・リアバンクあり、フィーダ浮きセンサなし
・ST、JE、CH仕様
・リアバンクあり、フロント・リアフィーダ浮きセンサあり
以下に各マシン仕様時の設定を示します。
1
O
N
2
3
4
5
6
7
8
SW2
・ST、JE、CH仕様
・リアバンクあり、フロントフィーダ浮きセンサあり
1
O
N
2
3
4
5
6
7
8
SW2
・ST、JE、CH仕様
・リアバンクあり、リアフィーダ浮きセンサあり
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit6: 图形版本
设定要参照 IO MI PCB ASM REVISION NOTE。
用于设定功能
Bit1:ON 时背面侧护罩打开有效
Bit2:ON 时正面侧送料器浮起传感器有效
Bit3:ON 时背面侧送料器浮起传感器有效
Bit4:ON 时 POWER MONITER(CE)生效
Bit5:ON 时若护罩打开则强制伺服 OFF(维护开关 OFF 时)
若护罩打开则轴慢速动作(维护开关 ON 时)
Bit6:ON 时送料器浮起则强制关断伺服
Bit7:OFF 固定(备用)
Bit8:OFF 固定(备用)
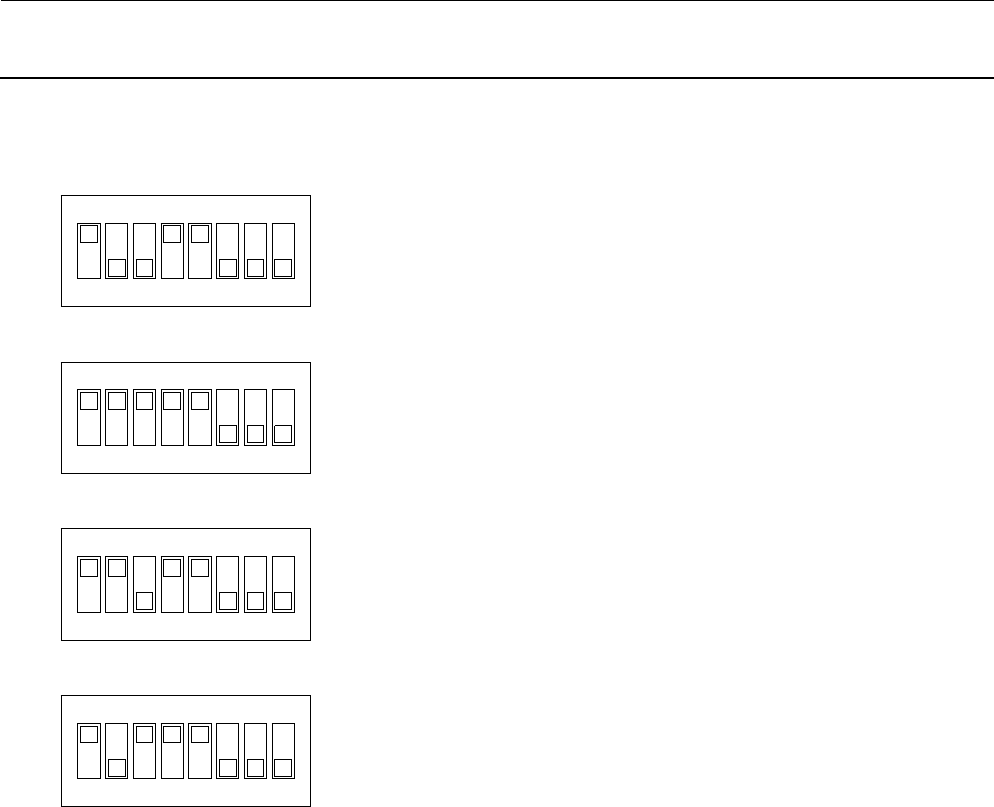
以下所示为不同机器规格时的设定。
・ ST,JE,CH 规格
・ 有后侧台架,无送料器浮起传感器
・ ST,JE,CH 规格
・ 有后侧台架,有前侧・后侧送料器浮起传感器
・ ST,JE,CH 规格
・ 有后侧台架,有前侧送料器浮起传感器
・ ST,JE,CH 规格
・ 有后侧台架,有后侧送料器浮起传感器
动作说明书
5-6
1
O
N
2
3
4
5
6
7
8
SW2
1
O
N
2
3
4
5
6
7
8
SW2
・EN仕様
・リアバンクあり、フィーダ浮きセンサなし
・EN仕様
・リアバンクあり、フロント・リアフィーダ浮きセンサあり
1
O
N
2
3
4
5
6
7
8
SW2
・EN仕様
・リアバンクあり、フロントフィーダ浮きセンサあり
1
O
N
2
3
4
5
6
7
8
SW2
・EN仕様
・リアバンクあり、リアフィーダ浮きセンサあり
・ EN 规格
・
有后侧台架
,
无送料器浮起传感器
・ EN 规格
・ 有后侧台架,有前侧・后侧送料器浮起传感器
・ EN 规格
・ 有后侧台架,有前侧送料器浮起传感器
・ EN 规格
・ 有后侧台架,有后侧送料器浮起传感器