JM-10_动作说明书 - 第73页
动作说明书 5-9 5-1-6 贴装头主基板 贴装头主基板通过传送串行 I/F 与 IO MI 基板进行通信,是控制贴装头部的 I/O 的基板。有下列内容。 (1) 真空和流动用电磁阀的驱动 (2) 读取真空传感器检测的真空数据 。 (3) Z 轴的减速传感器状态向 Z θ 轴伺服放大器输出 (4) HMS 的 I/F (5) OCC 图像的中继 (6) OCC 照明控制 (7) 贴装头提升气缸电磁阀的驱动 ① 构成贴装头的基板 ヘッド…
动作说明书
5-8
BASE
基板上实装有 4 个跨接端口。以下说明其设置方法。
W1
、W3、W4 按如下设置。W2 根据选项和 EN 规格,有不同设置。
W1
W3
W4
14710
36912
1
3
W4(3P)
:2-3ピン間ショート
W2(2×5P)
:1-2ピン間ショート時HOD(ST)非常停止無効
:3-4ピン間ショート時フロント側非常停止無効
:5-6ピン間ショート時リア側非常停止無効
:7-8ピン間ショート時フロント側カバーオープン無効
:9-10ピン間ショート時リア側カバーオープン無効
W1(2P)
:ショート
W3(3×4P)
:2-3ピン間ショート
:5-6ピン間ショート
:8-9ピン間ショート
:11-12ピン間ショート
W5
12
34
W5(2×2P)
1-2ピン間、3-4ピン間ショート時、HOD(EN)の非常停止無効
:ST、JE、CH時、オプションなしの設定は左図の通り。
W2
12
910
ST、JE、CH時、オプションなしの設定は、左図の通り。
全てオープン。
W2
12
910
EN仕様時は、左図の通り。
1-2ピン間、5-6ピン間ショート、他オープン。
W2
12
910
部にジャンパを設定のこと。
W5
12
34
:EN+HODオプション有り時、1-2ピン間オープン、3-4ピン間オープン
:短路
要在
部设置跨接。
:1-2pin 间短路时 HOD 紧急停止无效
:3-4pin 间短路时正面侧紧急停止无效
:5-6pin 间短路时背面侧紧急停止无效
:7-8pin 间短路时正面侧护罩打开无效
:9-10pin 间短路时背面侧护罩打开无效
ST、JE、CH 时,无选项的设定如右图所示
。
全部为开路
。
EN 规格时,如左图所示
。
1-2pin 间短路,5-6pin 间短路,其他为开路
:2-3pin 间短路
:2-3pin 间短路
:5-6pin 间短路
:8-9pin 间短路
:11-12pin 间短路
1-2pin 间
、
3-4pin 间短路时,HOD(EN)的紧急停止无效
:ST、JE、CH 时,无选项的设定如右图所示
。
:有 EN+HOD 选项时,1-2pin 间开路
、
3-4pin 间开路
动作说明书
5-9
5-1-6 贴装头主基板
贴装头主基板通过传送串行
I/F与 IO MI 基板进行通信,是控制贴装头部的
I/O
的基板。有下列内容。
(1)真空和流动用电磁阀的驱动
(2)读取真空传感器检测的真空数据。
(3)Z 轴的减速传感器状态向 Zθ 轴伺服放大器输出
(4)HMS 的 I/F
(5)OCC 图像的中继
(6)OCC 照明控制
(7)贴装头提升气缸电磁阀的驱动
①构成贴装头的基板
ヘッドメイン基板
ヘッド中継基板
OCC A LIGHT基板
OCC C LIGHT基板
②
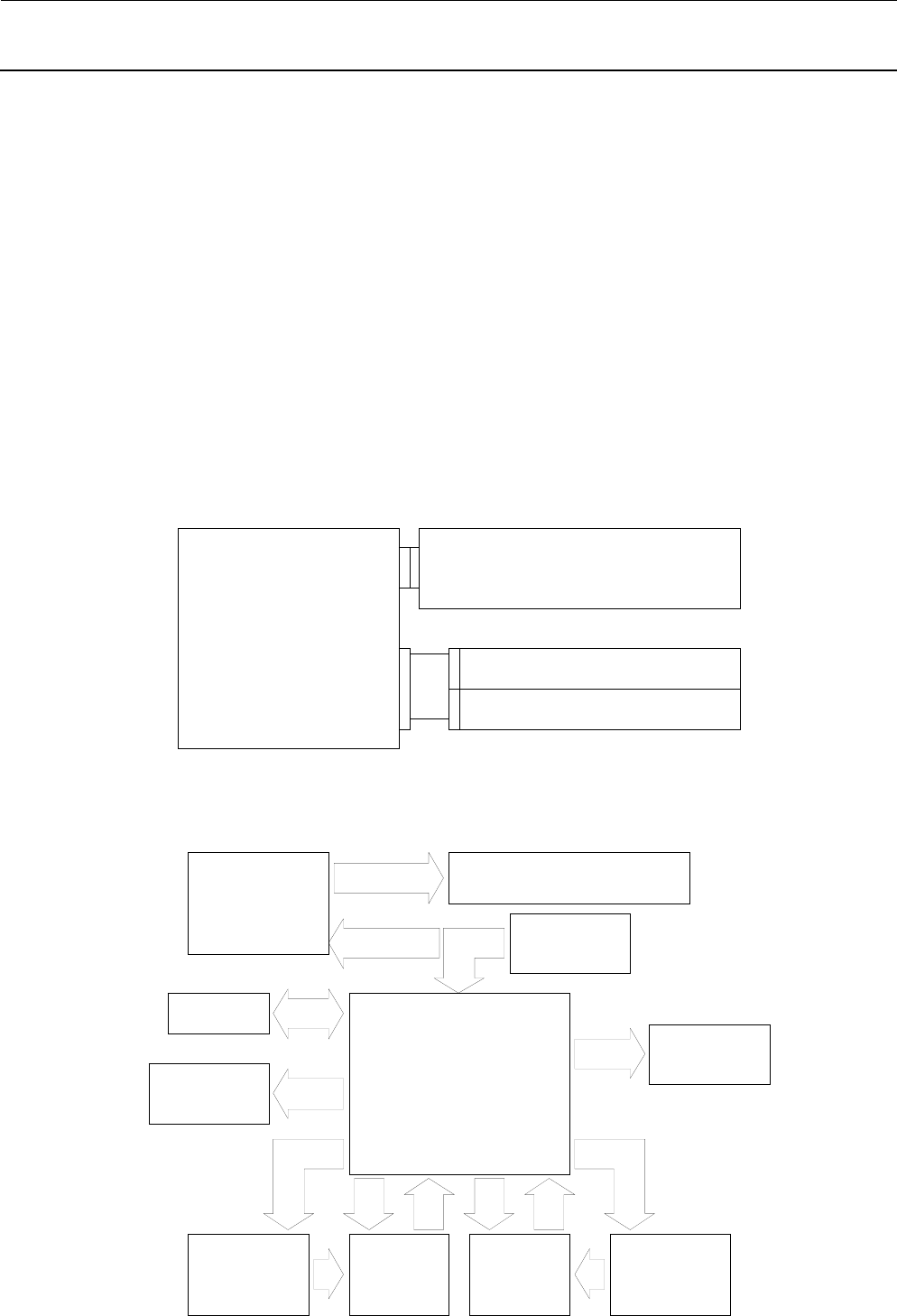
贴装头基板的方块图
贴装头主基板的功能方块图如下所示。
ヘッドI/Oコントローラ
(CPLD)
センサ入力I/F
サーボアンプI/F
LNC60 I/F
(θ軸エンコーダ信号分配)
シリパラI/F
アナログI/F
(真空圧センサ)
8bitA/D
変換器
12bitA/D
変換器
アナログI/F
(HMS)
トランジスタI/F
OCC照明
制御I/F
贴装头主基板
贴装头中转基板
OCC A LIGHT
基板
OCC C LIGHT
基板
伺服放大器 I/F
并串行 I/F
晶体管 I/F
模拟 I/F
(真空压力
传感器)
贴装头 I/O 控制器
(CPLD)
LNC60 I/F
(θ 轴编码器信号分配)
传感器输入
I/F
OCC
照明
控制 I/F
8Bit A/D
变换器
12Bit A/D
变换器
模拟 I/F
(HMS)
动作说明书
5-10
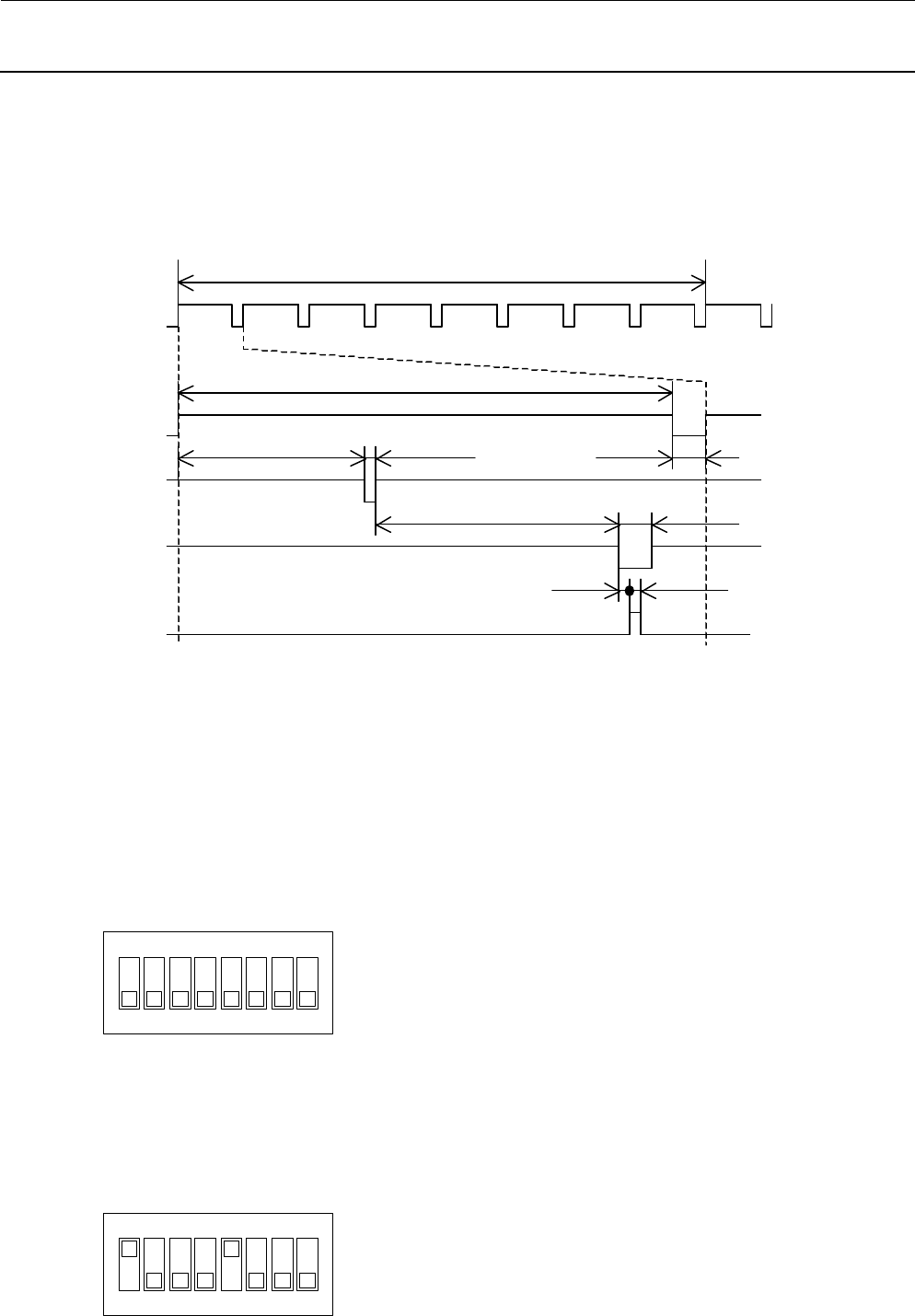
③
A/D变换关闭时间
点传感器和真空传感器的值的数据变换→数据寄存器的计时如下所示。
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ①
1.6384ms
192μs
12.8μs
① ②
アナログSWの切替
アナログSWの切替
A/D変換開始
78.4μs 1.6μs
A/Dデータ読込
105.6μs 4μs
1.6μs 0.8μs
A/Dデータラッチ
注1) ①~⑧为各模拟数据的变换时间(因此各锁定数据每1.6384mS更新。)
注
2) 各计时中所标的时间是标准值。
注3) 上述同步是自动生成,主控电脑可以自由地读取数据。
④DIP SW的说明
各
DIP SW 的意义如下。
1
O
N
2
3
4
5
6
7
8
SW3
パターン及び機能REV.設定用
Bit1~Bit4:パターンREV.
Bit2~Bit4:機能REV.
設定は、HEAD MAIN PCB ASM REVISION NOTE
を参照のこと。
1
O
N
2
3
4
5
6
7
8
SW2
各Z軸近点センサ無効化設定用
Bit1:ON時Z1センサ無効
Bit2:ON時Z2センサ無効
Bit3:ON時Z3センサ無効
Bit4:ON時Z4センサ無効
Bit5:ON時Z5センサ無効
Bit6:ON時Z6センサ無効
Bit7;OFF固定(予備)
Bit8;OFF固定(予備)
通常時はすべてOFFに設定すること。
A/D 变换开始
模拟 SW 的变换
模拟 SW 的变换
A/D 数据读取
A/D 数据锁定
用于设定各 Z 轴近点传感器的无效化
Bit1:ON 时 Z1 传感器无效
Bit2:ON 时 Z2 传感器无效
Bit3:ON 时 Z3 传感器无效
Bit4:ON 时 Z4 传感器无效
Bit5:ON 时 Z5 传感器无效
Bit6:ON 时 Z6 传感器无效
Bit7:OFF 固定(备用)
Bit8:OFF 固定(备用)
平时要全部设置为 OFF。
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit8: 图形版本
设定要参照 HEAD PCB ASM REVISION NOTE。