JM-10_动作说明书 - 第79页
动作说明书 5-15 5-2 马达的控制方式 5-2-1 XY 轴的控制方式 X 、 Y 轴均由 1 个电动机进行悬臂驱动,控制采用半闭环控制方式,进行元件贴装头的移动控制。 X 轴及 Y 轴的控制组成图如下所示。 CPCI Bus POSITION BOARD CH0 CH1 X軸 SE R V O A MP UVW相駆動出力 エン コーダ 出 力 (三菱シリ ア ル) Y軸SE R V O A MP UVW相駆動出力 SSCNET…
动作说明书
5-14
5-1-9 DRV-IO 基板
DRV-IO
基板通过专用的串行 I/F 与 IO MI 基板进行通信,是对径向送料器、碗式送料器等进行控制的基
板
。
下面是控制的内容
。
(1
)径向送料器内部电磁阀的驱动
(2
)碗式送料器内部电磁阀的驱动
(3
)碗式送料器内部的传感器
(4
)碗式送料器内部电动机的驱动
(5
)碗式送料器台架的定位传感器
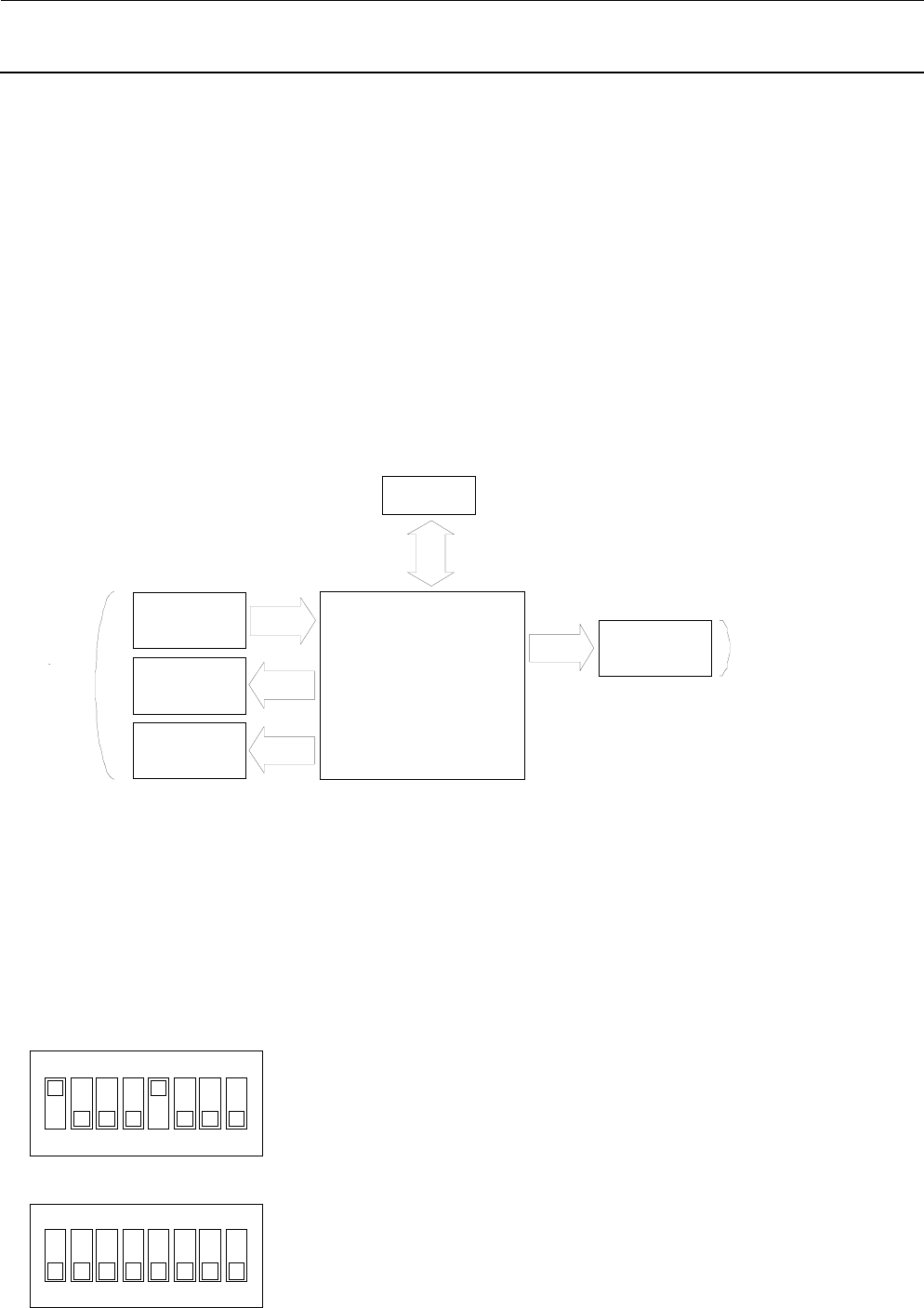
以下是 DRV-IO 基板功能方块图。
コントローラ
(FPGA)
シリパラI/F
トランジスタI/F
トランジスタI/F
センサ入力I/F
モータドライバ
DRV-IO
基板上安装 5 个 LED。以下是各 LED 的意义。
LD1
(红) ;FPGA 的程序写入结束时亮灯。
LD2
(橙色) ;正在从+24V 输出由基板内部生成的 5V 时亮灯
。
LD3
(橙色) ;正在从+24V 输出由基板内部生成的 3.3V 时亮灯
。
LD4
(橙色) ;+24V 正在输入到基板内部时亮灯
。
DRV-IO
基板上安装 2 个 Dip 开关。以下所示为各开关的意义。
1
O
N
2
3
4
5
6
7
8
SW2
パターン及び機能REV.設定用
Bit1~Bit4:機能REV.
Bit5~Bit6:パターンREV.
設定は、DRV-IO PCB ASM REVISION NOTE
を参照のこと。
1
O
N
2
3
4
5
6
7
8
SW3
機能設定用
すべてOFF設定。
并串行 I/F
碗式
送料器
I/F
晶体管 I/F
传感器输入
I/F
电动机驱动器
径向送料器
I/F
晶体管 I/F
控制器
(FPGA)
用于设定图形及功能版本
Bit1~Bit4: 功能版本
Bit5~Bit6: 图形版本
设定要参照 DRV-IO PCB ASM REVISION NOTE。
功能设置用
全部设置为 OFF
。
动作说明书
5-15
5-2 马达的控制方式
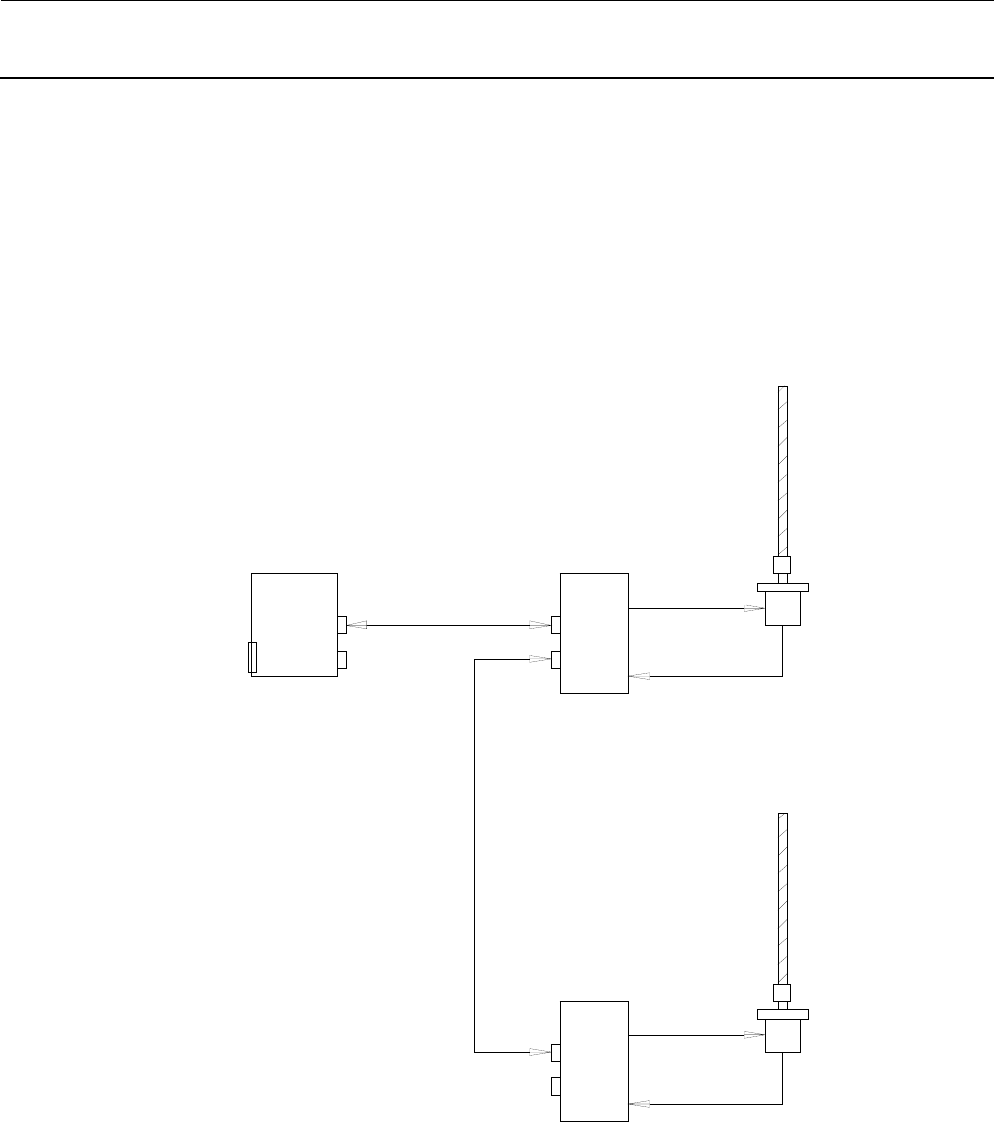
5-2-1 XY 轴的控制方式
X、Y 轴均由 1 个电动机进行悬臂驱动,控制采用半闭环控制方式,进行元件贴装头的移动控制。
X
轴及 Y 轴的控制组成图如下所示。
CPCI Bus
POSITION BOARD
CH0
CH1
X軸SERVO AMP
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Y軸SERVO AMP
UVW相駆動出力
SSCNETⅢ
(光通信)
X軸ボールネジ
(リードピッチ30mm)
X軸ボールネジ
(リードピッチ32mm)
エンコーダ出力
(三菱シリアル)
SSCNETⅢ
(光通信)
各 X、Y 驱动器的控制,采用三菱运动控制系统,即 SSCNETⅢ,以光 50Mbps 的通信速度进行 0.44ms 周
期的电动机控制。
关于控制,X 轴、Y 轴均通过利用滚珠螺杆的半闭环控制进行驱动。
X 轴滚珠螺杆
(螺距 30mm)
SSCNETⅢ
(光通信)
SSCNETⅢ
(光通信)
X 轴放大器
UVW 相驱动输出
编码器输出
(三菱串行)
UVW 相驱动输出
编码器输出
(三菱串行)
Y 轴滚珠螺杆
(螺距 32mm)
Y 轴放大器
动作说明书
5-16
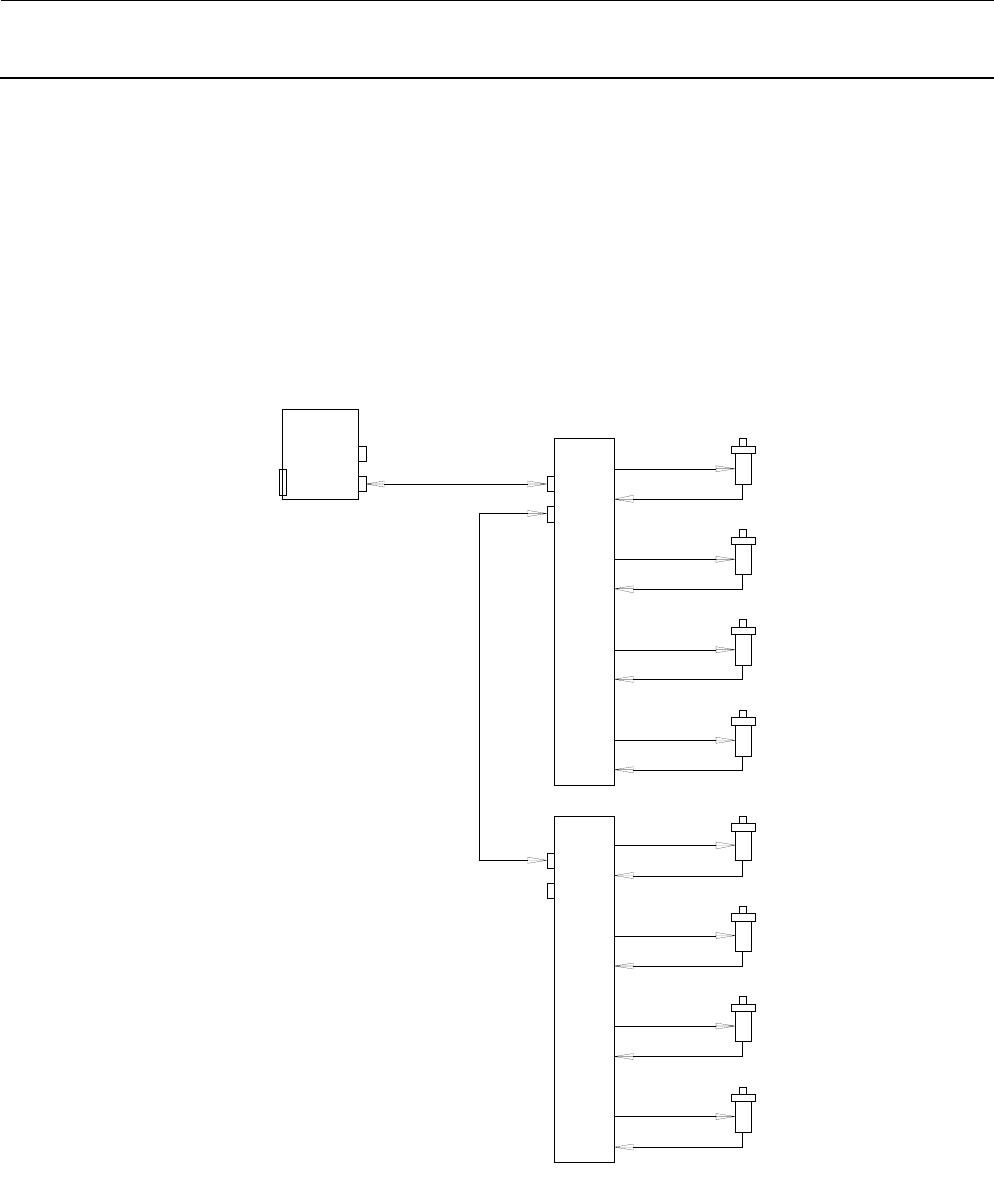
5-2-2 Z,θ 轴的控制方式
Z、θ 轴的电动机控制采用半闭环控制方式,在 Z 轴是进行元件的贴装及吸取等上下动作,在 θ 轴是进行
元件激光识别及角度校正等旋转动作。
Z
轴是每一吸嘴独立控制,但 θ 轴是对 3 个吸嘴用 1 个电动机控制,共计用 2 个电动机以 3 轴同时驱动方
式进行控制。
Z
轴及 θ 轴的控制组成图如下所示。
CPCI Bus
POSITION BOARD
CH0
CH1
4軸一体SERVO AMP
SSCNETⅢ
(光通信)
SSCNETⅢ
(光通信)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z1モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
θ1モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z2モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z3モータ
(30W)
4軸一体SERVO AMP
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z4モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
θ2モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z5モータ
(30W)
UVW相駆動出力
エンコーダ出力
(三菱シリアル)
Z6モータ
(30W)
各
4 轴 1 体驱动器的控制,采用三菱运动控制系统,即 SSCNETⅢ,以光 50Mbps 的通信速度进行 0.88ms
周期的电机控制。
1
块 4 轴一体式驱动器放大器电路板(MR-MD100)上,连接 1 个θ电动机、3 个 Z 电动机。
这一组合实装 2 块 4 轴一体式 AC 放大器电路板,驱动 8 轴。
另外,用于 Z 和θ的电动机为 30W 的相同货品。
SSCNETⅢ
(光通信)
SSCNETⅢ
(光通信)
4 轴 1 体放大器
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
UVW 相驱动输出
编码器输出
(三菱串行)
编码器输出
(三菱串行)
编码器输出
(三菱串行)
编码器输出
(三菱串行)
编码器输出
(三菱串行)
4 轴 1 体放大器
编码器输出
(三菱串行)
编码器输出
(三菱串行)
编码器输出
(三菱串行)
θ1 电动机
(30W)
Z1 电动机
(30W)
Z2 电动机
(30W)
Z3 电动机
(30W)
θ2 电动机
(30W)
Z4 电动机
(30W)
Z5 电动机
(30W)
Z6 电动机
(30W)