KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第20页
1 - 2 1-1-2. センタリングシステム センタリングシステム センタリングシステム センタリングシステム 本装置は、横からレーザ光を部品に当てて、その影を読み取り、部品の位置と角度を認識 するレー ザアラインセンサによるタッチレスセンタリング方式を採用しています。 図 図 図 図 1-1- 2-1 FM LA Z 軸の上下により、 バキュームで部品を吸着し、 部品にレーザ光を当てます。 部品でレーザ光がさえ ぎられた部分は、影に…
1 - 1
第
第第
第 1 章
章章
章
本装置の概要
本装置の概要本装置の概要
本装置の概要
1-1. 特長と仕様
特長と仕様特長と仕様
特長と仕様
本装置は、KE-700 シリーズの後継シリーズ(KE-2000 シリーズ)機種のひとつとなる表面実装部品
装着機であり、高速搭載を特長としています。
また、ホストラインコンピュータ(HLC)により、KE-2000 シリーズ間のラインコントロールの
みならず、KE-700 シリーズ及び、JUKI 製接着剤塗布機、ソルダーペースト印刷機とのラインコント
ロールを可能とし、あらゆるアプリケーションに適した、生産機能を大巾に充実させるライン構築
を行うことが可能となります。
操作面では、WindowsNT をソフトウエアの OS(基本ソフトウエア)に採用し、操作性を向上させ
ています。
1-1-1. 特長
特長特長
特長
• 4ノズル同時認識可能な、新開発レーザーアラインセンサ(MNLA)を装備し、10mm までの部品を
非接触センタリングで4ノズル同時吸着同時搭載により、11、000cph の高速搭載が可能です。
(330mm x 250mm の基板のほぼ全体に4部品同時吸着、1部品ずつ交互搭載したときの概算値です。)
(KE-2010,2020 に
にに
に適用
適用適用
適用)
• 反射/透過切り替え,立体可動照明,照度制御,波長(色)切り替え,同軸落射照明を備えた新部品認識
システムにより,QFP,BGA,CSP の認識力およびコネクタなどの異形部品対応が向上しました。
• 標準部品認識カメラ(最大部品サイズ□50mm)に加え,3種類のカメラがオプション設定され,部
品にあったカメラを選択することが可能になりました。
• 位置補正カメラ、高さ計測装置(オプション)、フィーダ一括段取り機能(オプション)、の装備
により、段取り時のマシン停止時間を最小化して高稼動率を実現します。
• 位置補正カメラは、パターンマッチング機能による高速基板マーク認識を実現します。更に、高速
基板搬送とあいまって、総合的な実質高速搭載性能を実現します。
• ツイン FMLA 高分解能ヘッドとツイン画像認識カメラユニットにより、2部品同時画像認識が可能
です。 (KE-2040 に適用
に適用に適用
に適用)
• レーザアライン計測時にチップ立ち状態の検出により吸着搭載信頼度が向上します。
• 基板サポート部(基板バックアップ)のモータ駆動化により、基板クランプ解除時の振動を防いで、
搭載後の部品ずれを防ぐとともに、クランプ、リリースの時間を短縮しました。
• 位置補正カメラと高さ計測装置によりカバーを開けずに段取り作業が可能になり、安全性能の向上
につながりました。
• フィーダセット部に LED によるインジケータ(フィーダポジションインジケータ:FPI)(オプション)
を設置、生産時の部品切れ通知、部品残量警告を行い、部品交換時の操作性向上を実現しました。
• WindowsNT の採用により高い操作性を実現しました。
1 - 2
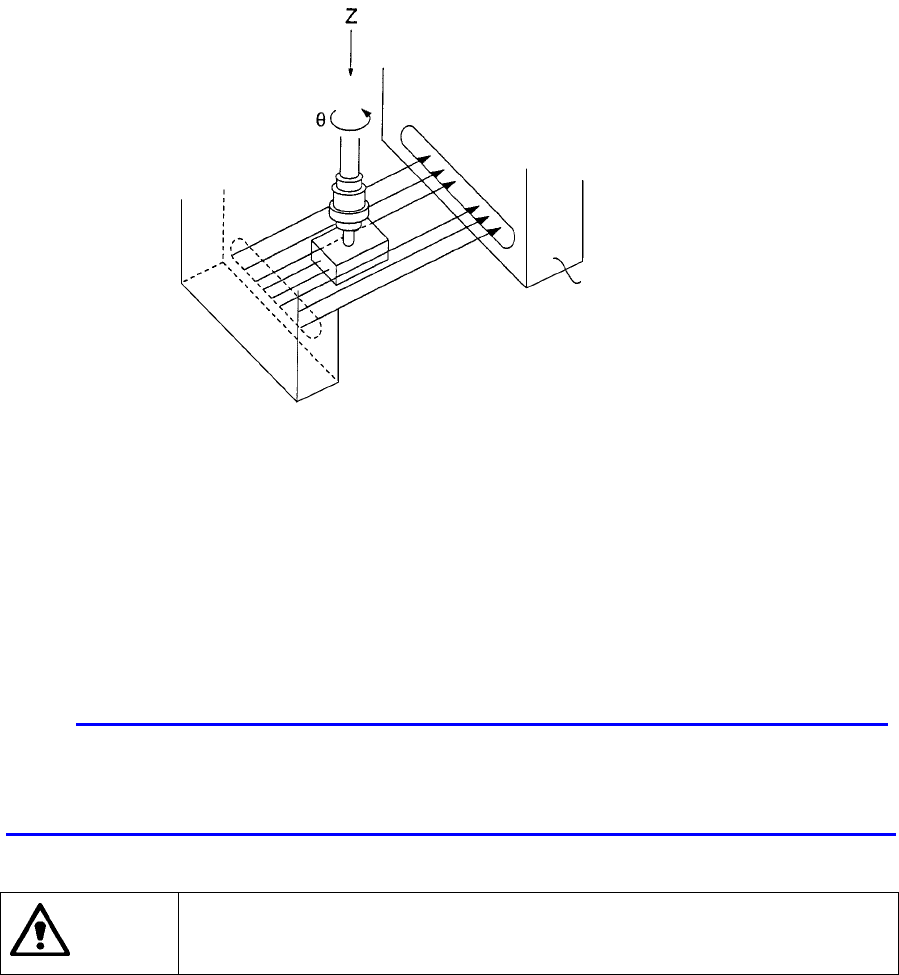
1-1-2. センタリングシステム
センタリングシステムセンタリングシステム
センタリングシステム
本装置は、横からレーザ光を部品に当てて、その影を読み取り、部品の位置と角度を認識するレー
ザアラインセンサによるタッチレスセンタリング方式を採用しています。
図
図図
図 1-1-2-1 FMLA
Z 軸の上下により、バキュームで部品を吸着し、部品にレーザ光を当てます。部品でレーザ光がさえ
ぎられた部分は、影になり、θ軸で部品を回転させることで、その影の幅の変化がわかります。
◇ 影の幅の変化から、吸着した部品の位置ずれ及び角度ずれを求め、このずれ量を補正して搭載しま
す。
L
レーザアラインセンサは、IEC825Class1 及び CDRH Class 1 に適合しています。
本書に従って、使用される場合には安全にお使いいただけます。
注意
注意注意
注意
本書に記述されていない手順での制御
本書に記述されていない手順での制御本書に記述されていない手順での制御
本書に記述されていない手順での制御、
、、
、調整
調整調整
調整、
、、
、実行の使用は
実行の使用は実行の使用は
実行の使用は、
、、
、危険な放射露
危険な放射露危険な放射露
危険な放射露
光を引き起こす可能性があります。
光を引き起こす可能性があります。光を引き起こす可能性があります。
光を引き起こす可能性があります。
レーザアラインセンサ
1 - 3
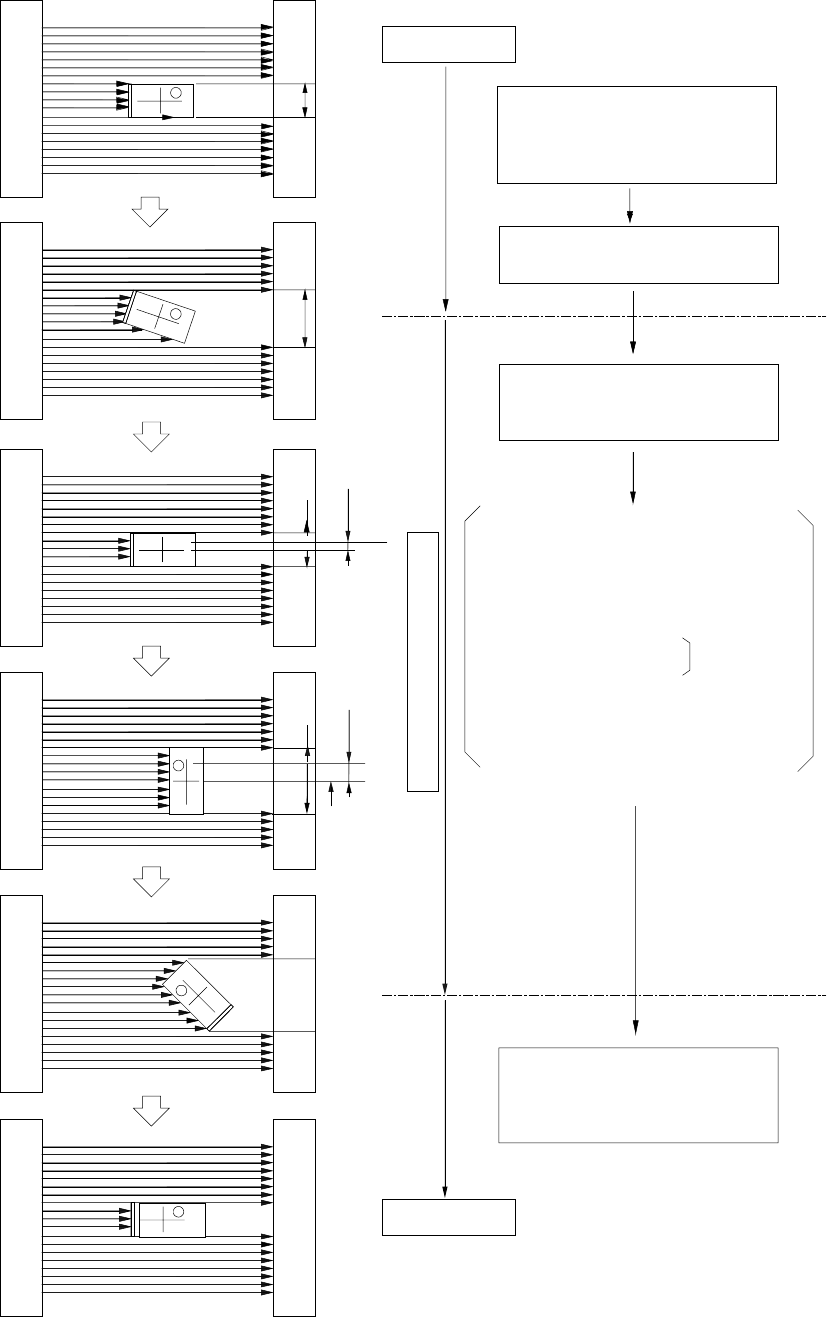
(1) レーザアラインセンタリングの流れ
レーザアラインセンタリングの流れレーザアラインセンタリングの流れ
レーザアラインセンタリングの流れ
図
図図
図 1-1-2-2
A
D
d X
B
C
d Y
E
(-) 回転
(プリロード)
(+) 回転
(+) 回転
(+) 回転
補正
⑥
⑤
④
③
②
①
部品吸着
プリロード
Z 軸の駆動により部品を吸着し、
レーザアライン高さに部品を合
わせます
(ノズル中心)
(部品中心)
レーザアライン計測
補正
搭載
次に(-)方向にθを回転します
(プリロード)
θ軸を(+)方向に回転させて、
レーザアラインの計測開始
計測途中で陰の幅が最小となる ③④
を見つける。
ここでノズル中心は、既にわかって
いるため部品中心との差から
Y方向のずれ dX
X方向のずれ dy が判ります。
また ③ あるいは ④ における
θモータのエンコーダ出力から
角度のずれ dθを知ることができます。
位置ずれ (dX、 dY)
角度ずれ (dθ)
を補正して搭載