KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第279页
4 - 174 4-12-3. ビジョン認識検査 ビジョン認識検査 ビジョン認識検査 ビジョン認識検査 実部品のヘッド装着を行い、ビジ ョン認識にて、部品のセン タリングが可能であるかを検査す る機能です。 4-12-3-1. ビジョン認識検査 ビジョン認識検査 ビジョン認識検査 ビジョン認識検査 以下にビジョン認識検査の概要フロー図を示します。 ビジョン認識 検査開始 検査実行 (ダイアログ) ビジョン認識 検査 結果表示 (ダイ…
4 - 173
3) 確定/次部品(<START>ボタン)
測定結果を有効にし、結果の値を部品データに格納します。その後、次の部品の測定を行いま
す。
4) 中止(ESC キー)
測定結果を無効にし、その後、連続測定を中止して元の連続測定条件設定画面に戻ります。
5) 単独測定(F7キー)
単独測定モードに移行します。
6) ショートカットキー
連続測定結果画面では、以下のショートカット操作を行うことができます。
キーボード
キーボードキーボード
キーボード オペパネキー
オペパネキーオペパネキー
オペパネキー HOD キー
キーキー
キー 動作
動作動作
動作
− START − 確定して次部品を測定
ESC STOP − 連続測定を中止する。
F7 − − 単独測定モードへ移行
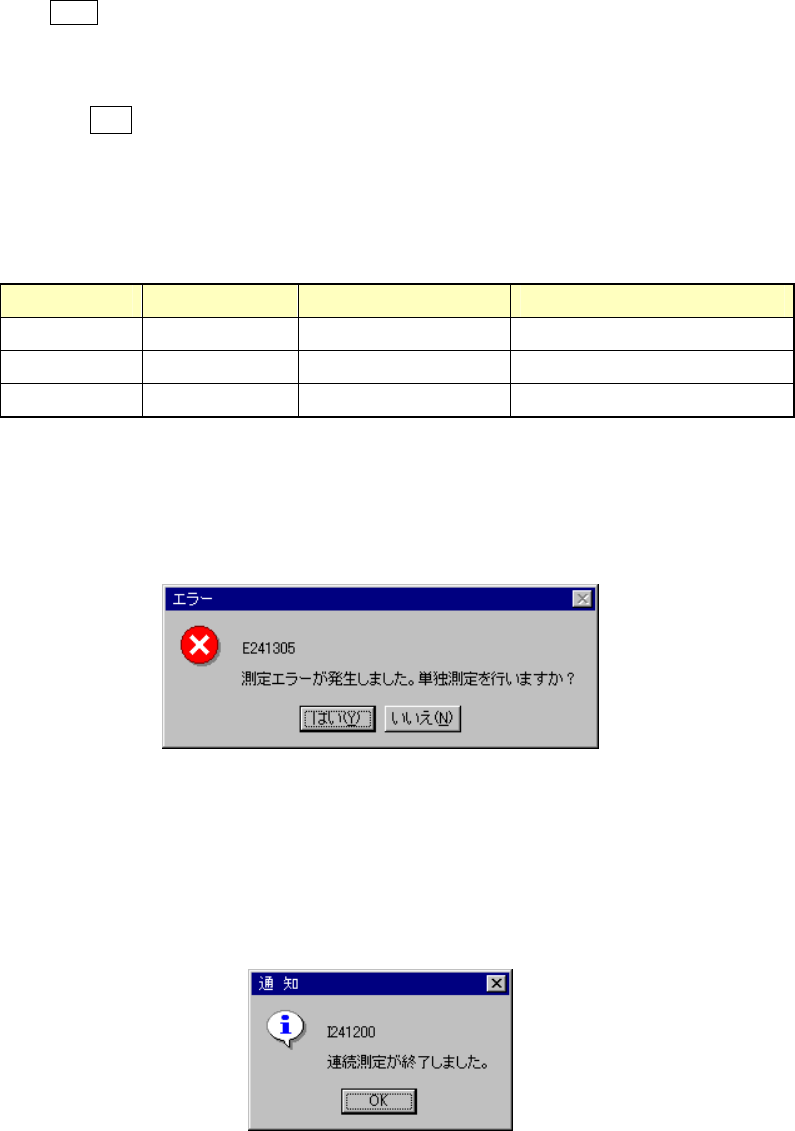
7) 測定エラー
何らかの要因で測定時エラーになった場合は以下のダイアログが表示されますので直ちに単独
測定モードに移行することができます。
図
図図
図 4-12-2-4-3-6
連続測定エラーダイアログ
連続測定エラーダイアログ連続測定エラーダイアログ
連続測定エラーダイアログ
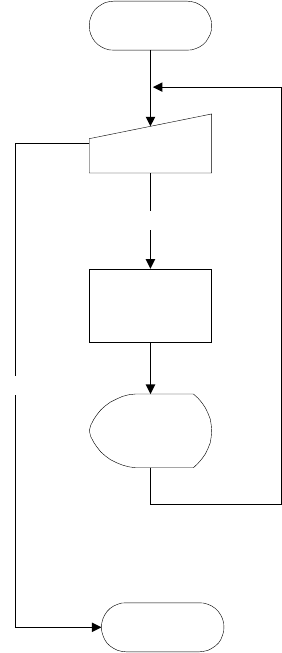
(4) 連続測定終了
条件に指定したすべての部品の測定が終了すると以下のダイアログが表示されます。
図
図図
図 4-12-2-4-3-7
連続測定終了ダイアログ
連続測定終了ダイアログ連続測定終了ダイアログ
連続測定終了ダイアログ
4 - 174
4-12-3. ビジョン認識検査
ビジョン認識検査ビジョン認識検査
ビジョン認識検査
実部品のヘッド装着を行い、ビジョン認識にて、部品のセンタリングが可能であるかを検査す
る機能です。
4-12-3-1. ビジョン認識検査
ビジョン認識検査ビジョン認識検査
ビジョン認識検査
以下にビジョン認識検査の概要フロー図を示します。
ビジョン認識
検査開始
検査実行
(ダイアログ)
ビジョン認識
検査
結果表示
(ダイアログ)
ビジョン認識
検査終了
検査実行
終了
図
図図
図 4-12-3-1-1 ビジョン認識単独検査フロー図
ビジョン認識単独検査フロー図ビジョン認識単独検査フロー図
ビジョン認識単独検査フロー図
4-12-3-2. ビジョン認識検査の検査方式
ビジョン認識検査の検査方式ビジョン認識検査の検査方式
ビジョン認識検査の検査方式
部品データに設定されている値で、ビジョンセンタリングの一連の制御を行い、エラーになら
ないことを検査します。
4 - 175
4-12-3-3. ビジョン認識検査時の諸動作について
ビジョン認識検査時の諸動作についてビジョン認識検査時の諸動作について
ビジョン認識検査時の諸動作について
① 吸着に使用するヘッド
吸着に使用するヘッドの選択については自動的にヘッドが選択されます。
既に装着済みのノズルを優先しノズル交換が少なくなるようヘッドを使用していきます。
ノズルの装着状況によっては測定毎に、ヘッドが異なることがあります。
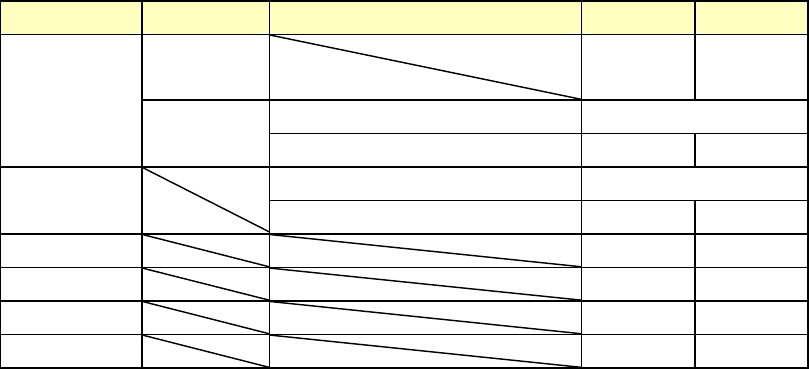
② 検査後の部品返却
検査後の部品を元の位置に戻す場合と、破棄する場合があります。下表に示すように荷
姿
によって異なります。
廃棄する場所は部品データの「部品廃棄」の設定に基づき廃棄します。1mm 以下の部
品は、返却時に部品立ちになってしまったり、裏返ったりする可能性もあるため問い合
わせによって動作を選びます。
表
表表
表 4-12-3-1
部品返却/廃棄条件
部品返却/廃棄条件部品返却/廃棄条件
部品返却/廃棄条件
荷
荷荷
荷 姿
姿姿
姿 条
条条
条 件
件件
件 1
11
1 条
条条
条 件
件件
件 2 返
返返
返 却
却却
却 廃
廃廃
廃 棄
棄棄
棄
32mm
フィーダー
− ○
外形サイズ短辺 1mm 以下 問合わせ*1
テープ
以外
外形サイズ短辺 1mm 以上 ○ −
外形サイズ短辺 1mm 以下 問合わせ*1
バルク
外形サイズ短辺 1mm 以上 ○ −
ホルダ ○ −
MTC ○ −
MTS ○ −
スティック − ○
*1 ダイアログを表示して、部品を返却するか破棄するかを選択します。連続測定時に
は
開始前に問い合わせを行います。
③ 吸着する供給装置の選択
同一部品に複数の供給装置(吸着データ)がある場合、デフォルトでは最初に入力した
データから部品を吸着します。
供給装置を意図的に変更することも可能です。
④ 吸着座標の変更
吸着がうまくいかない場合などに、手入力やHODデバイスを使用して座標ティーチン
グを行い吸着座標を変更します。
⑤ 手動吸着
吸着データがない場合に部品を手動でノズルに装着することができます。この場合、吸
着座標は入力不可となります。また、フィーダも操作できません。