KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第303页
4 - 198 1) 状態 状態 状態 状態 ① 追尾モード ◇ 送り方法で設定した「手動」か「自動」かが表示されます。 ② 追尾順序 追尾順番で設定した「フィーダー順」か「部品順」かが表示されます。 ③ 追尾範囲 部品番号の何番から何 番までを実行する か,または,どのフィーダ バンクを実行 するかが表示されます。 ④ 追尾状態 「動作中」は,軸が移 動中であることを 示します。「ポーズ」は自 動送りでの一 時停止中であることを …
4 - 197
(2) バンクマークアライメントの実行
バンクマークアライメントの実行バンクマークアライメントの実行
バンクマークアライメントの実行
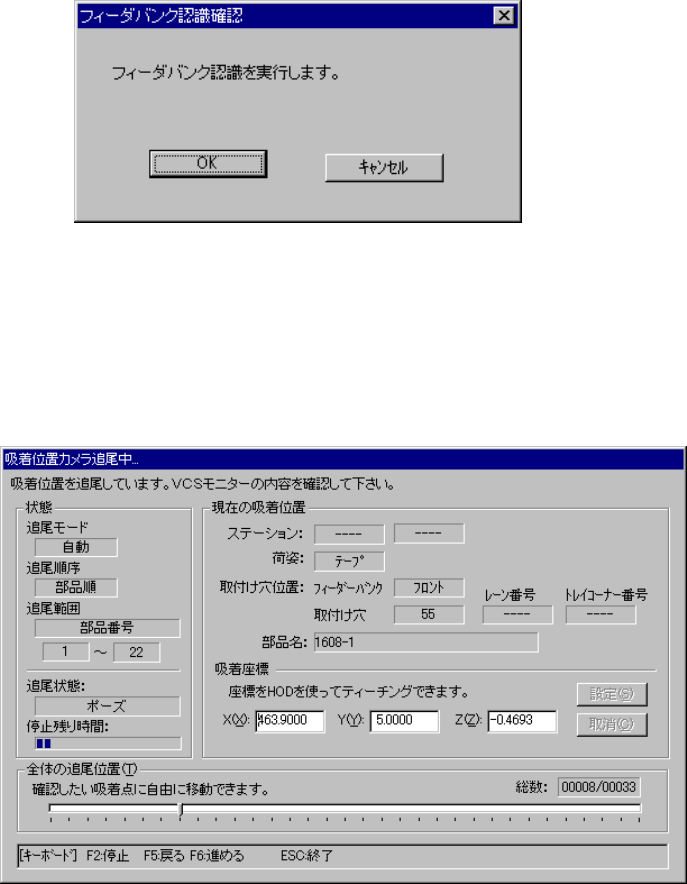
各フィーダバンクへ追尾移動前,バンクマーク認識がセットアップにて設定されている場
合は,吸着位置の精度を向上するためにバンクマーク認識を実行します。以下ダイアログ
が表示されますので<OK>を押してください。<キャンセル>を押した場合は精度補正されませ
ん。
図
図図
図 4-12-5-4-2
フィーダバンク認識確認ダイアログ
フィーダバンク認識確認ダイアログフィーダバンク認識確認ダイアログ
フィーダバンク認識確認ダイアログ
(3) 吸着位置カメラ追尾/吸着高さ追尾実行中
吸着位置カメラ追尾/吸着高さ追尾実行中吸着位置カメラ追尾/吸着高さ追尾実行中
吸着位置カメラ追尾/吸着高さ追尾実行中
実行後,各吸着位置(高さ)の追尾中は以下ダイアログが表示されます。
図
図図
図 4-12-5-4-3
吸着位置カメラ追尾中(吸着高さ追尾中)ダイアログ
吸着位置カメラ追尾中(吸着高さ追尾中)ダイアログ吸着位置カメラ追尾中(吸着高さ追尾中)ダイアログ
吸着位置カメラ追尾中(吸着高さ追尾中)ダイアログ

4 - 198
1) 状態
状態状態
状態
① 追尾モード
◇ 送り方法で設定した「手動」か「自動」かが表示されます。
② 追尾順序
追尾順番で設定した「フィーダー順」か「部品順」かが表示されます。
③ 追尾範囲
部品番号の何番から何番までを実行するか,または,どのフィーダバンクを実行
するかが表示されます。
④ 追尾状態
「動作中」は,軸が移動中であることを示します。「ポーズ」は自動送りでの一
時停止中であることを示します。「停止」は手動送りまたは意図的に停止させた
ときを示します。「軸待避中」は軸を安全位置に移動していることを示します。
⑤ 停止残り時間
自動送りでの一時停止残り時間をプログレスバーで表示します。
2) 現在の吸着位置
現在の吸着位置現在の吸着位置
現在の吸着位置
① ステーション(
((
(KE2030 のみ適用)
のみ適用)のみ適用)
のみ適用)
追尾中のステーション
② 荷姿
追尾中部品の荷姿
③ 取付け穴位置
追尾中部品の取付け穴の位置,スティックフィーダの場合はレーン番号,トレ
イの場合はコーナー番号も表示されます。
④ 部品名
追尾中部品の名
4 - 199
3) 吸着座標
吸着座標吸着座標
吸着座標
追尾中の吸着座標です。座標値は手入力またはティーチングで変更できます。
4) 設定/取消
設定/取消設定/取消
設定/取消
座標値を手入力またはティーチングで変更した場合に有効になります。「設定」を押
した場合は,吸着データに格納されます。また変更値を格納したくない場合は「取
消」を押して下さい。
5) 全体の追尾位置
全体の追尾位置全体の追尾位置
全体の追尾位置
追尾位置が進むにつれ一つづつ進みます。停止中はこのスライダーを自由に移動させ
ることで前に戻ったり,次に進めたりすることができます。