KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第410页
6 - 4 注意 注意 注意 注意 フィーダバンク認識を一度も行っていない 場合に(原点復帰から,も しくはバン ク下降し,上昇させた 後から) , 吸着位置移動前にフ ィーダバンク認 識実行時は , ヘッドが供給装置の上を横切りますので, 手や顔などを装置内に入れ たり近づけ ないで下さい。 特にティ ーチング,吸着追尾等のメ ニュー以外からの認識実行 時の動作には気をつけて下さい。 (2) 認識のティーチング 認識のティーチング…
6 - 3
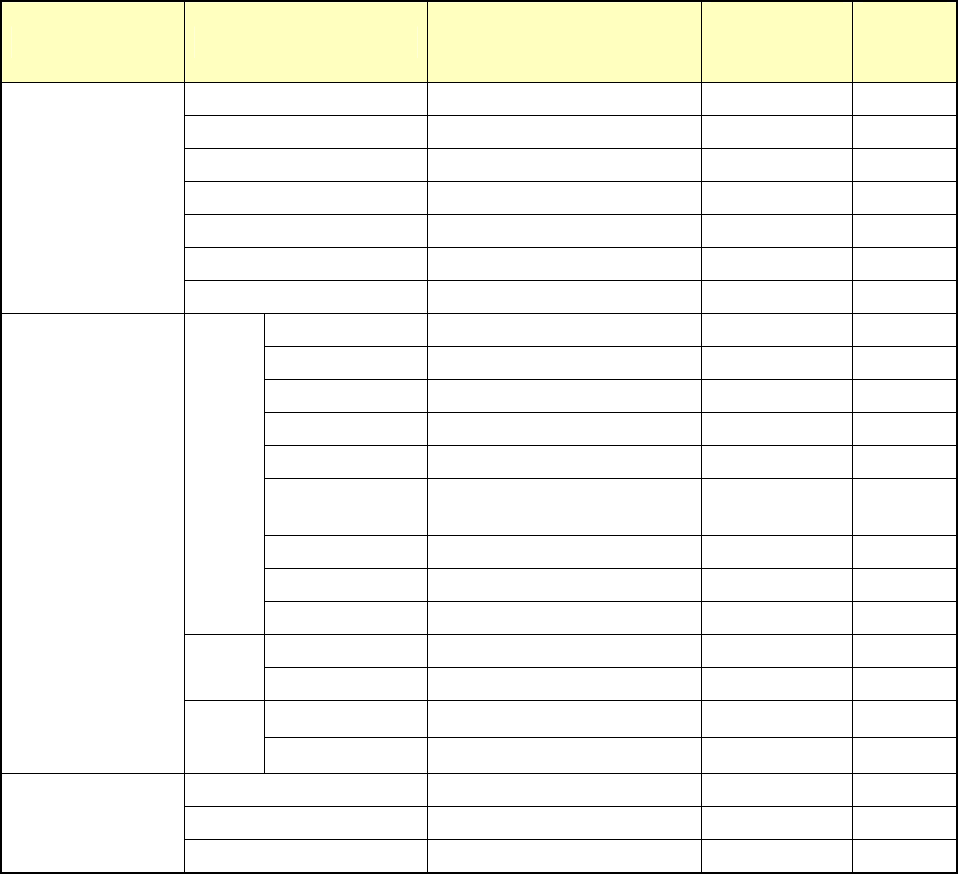
ティーチング項目の詳細を表 6-2 に纏めました。
表
表表
表 6-2.
ティーチング項目
ティーチング項目ティーチング項目
ティーチング項目
作業区分 データ項目 データの原点
BOC
アラインメント
で補正
フィーダ
バンク認
識で補正
基準ピンの位置 XY座標原点
従動ピンの位置 XY座標原点
外形基準の位置 XY座標原点
MTC シャトル吸着位置 XY座標原点
部品廃棄位置 XY座標原点
ノズル無しバキューム値
マシンセットアップ
ヘッド待機位置 XY座標原点
位置決め穴位置 基板位置基準 ○
基板レイアウトオフセット 基板位置基準 ○
先頭回路位置 基板位置基準 ○
回路レイアウトオフセット 基板位置基準 ○
BOCマーク位置 基板位置基準又は回路位置基準 *1 ○
BOC マーク認識
パラメータ
バッドマーク位置 回路位置基準 ○
基板高さ
基 板
データ
基板厚さ
搭載位置 基板位置基準又は回路位置基準 *2 ○ 搭 載
データ
ICマーク位置 基板位置基準又は回路位置基準 *2 ○
吸着位置XY XY座標原点又はリア原点 *3 ○
生産プログラム
吸 着
データ
吸着位置Z Z軸原点(基板上面)
搭載位置XY 基板位置基準又は回路位置基準 *2 ○
吸着位置XY XY座標原点又はリア原点 *3 ○
生産
吸着位置Z Z軸原点(基板上面)
*1 基板構成が一面取りの場合は,基板位置基準,多面取りマトリックス及び多面取り非マトリ
ックスの場合には,BOCの種類が基板のマークの使用であれば基板位置基準,回路毎のB
OCを使用であれば,回路位置基準をデータの原点にします。
*2 基板構成が一面取りの場合には基板位置基準,多面取りマトリックス及び多面取り非マトリ
ックスの場合には,回路位置基準をデータの原点とします。
*3 機械前面に取付けられる部品供給装置の吸着位置はXY座標原点を,機械後面に取付けられ
る場合には,リア原点をデータの原点とします。
6 - 4
注意
注意注意
注意
フィーダバンク認識を一度も行っていない場合に(原点復帰から,もしくはバン
ク下降し,上昇させた後から),吸着位置移動前にフィーダバンク認識実行時は,
ヘッドが供給装置の上を横切りますので,手や顔などを装置内に入れたり近づけ
ないで下さい。 特にティーチング,吸着追尾等のメニュー以外からの認識実行
時の動作には気をつけて下さい。
(2) 認識のティーチング
認識のティーチングで取得するデータを下記に示します。
① BOCマーク形状,マーク寸法,プロジェクションデータの認識に必要なデータ,重心
を検出するエリア枠
② ICのマーク形状,マーク寸法,プロジェクションデータの認識に必要なデータ,重心
を検出するエリア枠
1) 認識のティーチング中には,デバイスはCAMERA固定になり変更は出来ません。
2) 認識のティーチングは,原点出し未完了状態,サーボフリー状態で行う事が出来ません。
3) 予めマークのXY座標は入力しておく事が必要です。
注意
注意注意
注意 :
6 - 5
6-3. 座標のティーチング
座標のティーチング座標のティーチング
座標のティーチング
6-3-1. 基本操作方法
基本操作方法基本操作方法
基本操作方法
ここでは,座標のティーチングの基本操作方法を説明します。
① ティーチングしたいデータの位置にカーソルを移動させます。
XY軸のティーチングの場合には,XY軸両方の座標がティーチングされます。
Z軸のティーチングは,別個に行う必要があります。
図
図図
図 6-3-1
座標ティーチング(1)
座標ティーチング(1)座標ティーチング(1)
座標ティーチング(1)
② この状態で,HODのデバイス選択キーでティーチングの対象となるデバイスを選択します。
但し,選択されたデバイスが不適当な場合には,エラー音が鳴り,デバイスの選択の再入力
となります。
予め,座標が入力されている場合には,その座標値に選択したデバイスが移動します。
入力されていない場合には,デバイスは移動しません。
注意
人身への損害を防ぐ為,HOD操作中は装置内に手を入れたり,顔や頭を近づ
けないで下さい。