KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第56页
1 - 38 1-3. X 、 、 、 、 Y 、 、 、 、 Z 軸の説明 軸の説明 軸の説明 軸の説明 本装置で数値制御される軸は以下に示す4軸( X 、 Y 、 Z 、θ)です。 (1) X 、 Y 軸 装置の左右方向をX、 前後方向Yとし, 0.01 m m 単位で X =○○○ . ○○ mm , Y =○○○ . ○○ mm で表します。 座標系は生産プログラム上の座標とティーチング時の座標があります。 両座標は、 自 動的…
1 - 37
1-2-8. VCSの名称
VCSの名称VCSの名称
VCSの名称
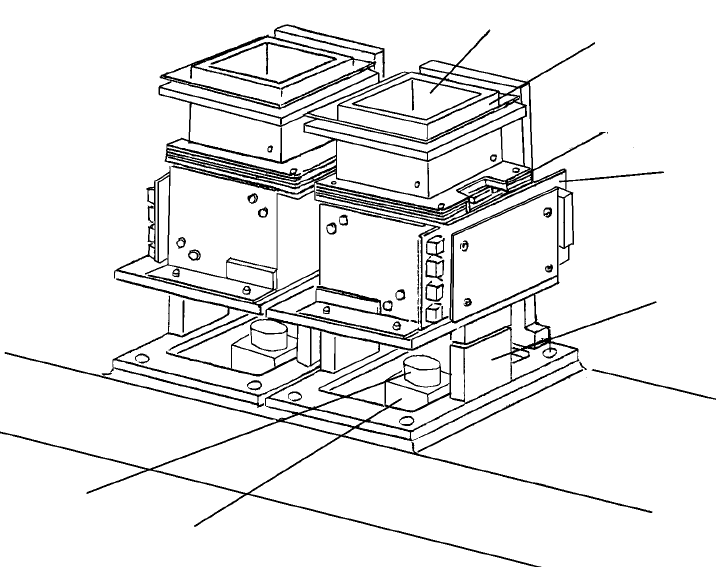
反射/透過照明,立体可動照明,同軸落射照明を組み合わせて部品認識を行い,QFP,BGA,C
SP,コネクタ等の搭載を行います。
図
図図
図 1-2-8
88
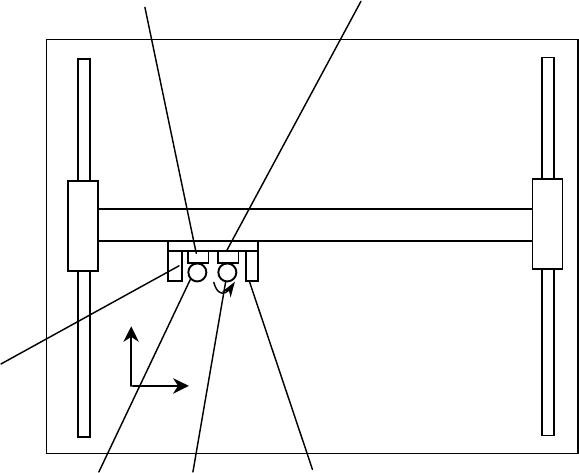
8-1 VCSユニットの各部名称
VCSユニットの各部名称VCSユニットの各部名称
VCSユニットの各部名称
①LED基板(透過照明)
②LED基板(サイド照明)
③LED基板(下方照明)
④LED基板(同軸照明)
⑤VCSレンズ
⑥VCSカメラ
⑦エアシリンダ
①
②
③
④
⑤
⑥
⑦
1 - 38
1-3. X、
、、
、 Y、
、、
、 Z軸の説明
軸の説明軸の説明
軸の説明
本装置で数値制御される軸は以下に示す4軸(X、 Y、 Z、θ)です。
(1) X、 Y軸
装置の左右方向をX、前後方向Yとし,0.01 mm 単位で X=○○○.○○ mm,Y=○○○.○○ mm
で表します。座標系は生産プログラム上の座標とティーチング時の座標があります。両座標は、自
動的に変更されるため、意識して使い分ける必要はありません。
(2) Z 軸
高さ方向を示し,0.01 mm 単位で Z=○○.○○ mm で表します。基板をクランプしたときの基板
上面(治具を使わない)を0とし、上昇方向は+とします。
(3) θ軸
ヘッドの回転角度を示し,0.05°単位で A=○○.○○で表します。反時計方向の回転を+とし,
時計方向と一とします。
図
図図
図 1-3-1
Y軸
θ
+
Y
+
X
+
FMLA ヘッド(L)
FMLA ヘッド(R)
OCC-L
IC ノズル軸
IC ノズル軸
OCC-R
X軸
Z+
1 - 39
1-4. 外部装置とのインターフェイス
外部装置とのインターフェイス外部装置とのインターフェイス
外部装置とのインターフェイス
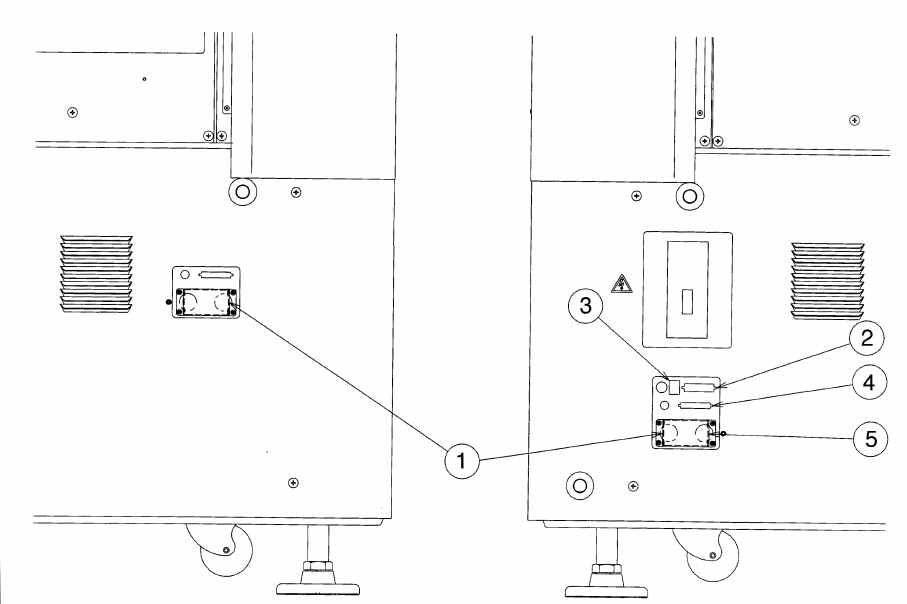
(1) ①は、本体装置をオンラインで使用する場合に他の装置と接続するレディアウト(イン)用コネク
タ(14 pin)です。
搬送方向が左→右の場合と右→左の場合とでレディアウト(イン)用コネクタのピン配置は表 1-4-1
及び表 1-4-2 参照。
(2) ②は、プリンタ用コネクタ(Dsub 25 pin)でセントロニクス方式に準拠しています。
プリンタ用コネクタのピン配置は表 1-4-3 参照。
③は、イーサネットコネクタ(モジュラーコネクタ8P)です。
イーサネットコネクタのピン配置は表 1-4-6 参照。
図
図図
図 1-4-1
本体正面左側
本体正面左側本体正面左側
本体正面左側 図
図図
図 1-4-2
本体正面右側
本体正面右側本体正面右側
本体正面右側
④は、マトリックスチェンジャインターフェース用コネクタ(50P)です。
⑤は、マトリックスチェンジャ電源用コネクタ(7P)です。