KE2040取扱説明書Ver.2.01和文Rev.04.pdf - 第770页
13 - 30 ◆ 最小二乗法におけるリード部品のコプラナリティ 最小二乗法における方法は、全ての端子 の最下点から最小二乗法により求めた平面がパ ッケージ本体側から最も離れた端子の最 下点に接する平面に対し、最も離れた端子まで の距離をコプラナリティとします。 図 図 図 図 13-13-2-3 最小二乗法によるコプラナリティの算出 最小二乗法によるコプラナリティの算出 最小二乗法によるコプラナリティの算出 最小二乗法によるコプラナリ…
13 - 29
13
1313
13-
--
-13
1313
13-
--
-2
22
2-
--
-2.
2.2.
2.コプラナリティチェック
コプラナリティチェックコプラナリティチェック
コプラナリティチェック
コプラナリティを求める方法として、二通りが有ります。
QFP/SOPはEIAJに定める方法、あるいは最小二乗法によりコプラナリティ(端子最下面の均一性)
を求めることが可能です。
■ 出荷時の設定は、EIAJ に定める方法となっております。設定の変更は、マシンセットアップ
にて可能です。
QFP は EIAJED-7401-4、SOP は EIAJED-7304-1 あるいは最小二乗法によります。
ボール部品は、EIAJED-7304 によります。
EIAJ に定める方法は、仮想平面より全ての端子の最下点までの鉛直方向距離のばらつきのう
ち、最も離れた端子の最下点までの距離をコプラナリティの値とします。
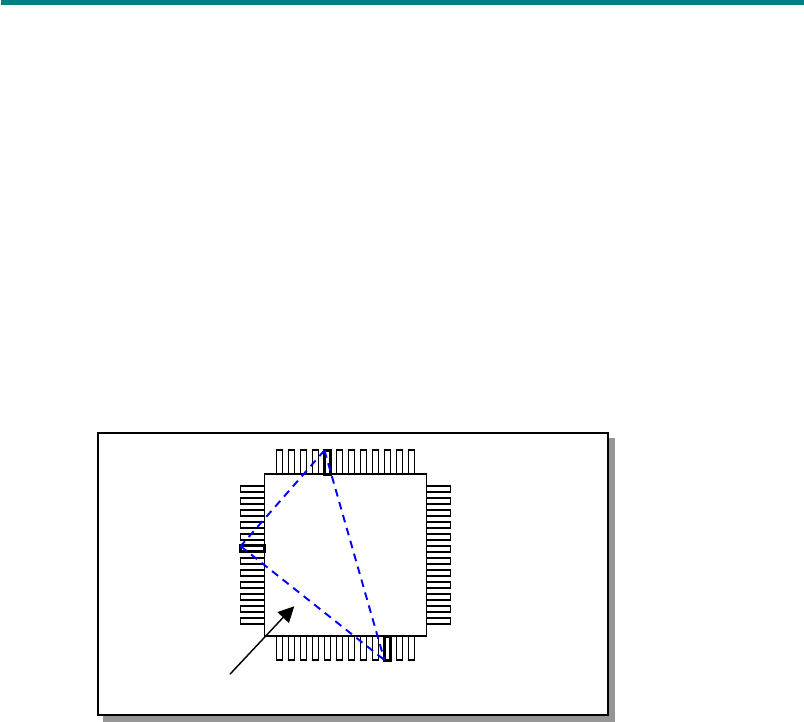
◆ 3 点法におけるリード部品のコプラナリティ(EIAJ に定める方法:デフォルト)
任意の 3 本の端子の最下点を通る幾何学平面のうち、他の端子の最下点が全てパッケー
ジ本体側に存在し、その 3 点で構成された三角形の内部または辺上にパッケージの重心
が含まれる平面です。
但し、自重の影響は受けません。上記条件を満足する組合せが、複数存在する場合、コ
プラナリティの値が大きくなる組み合わせを採用します。
図
図図
図 13-13-2-2 3点法
3点法3点法
3点法による
によるによる
によるコプラナリティの算出
コプラナリティの算出コプラナリティの算出
コプラナリティの算出
最下点により求められた平面
最下点により求められた平面最下点により求められた平面
最下点により求められた平面
13 - 30
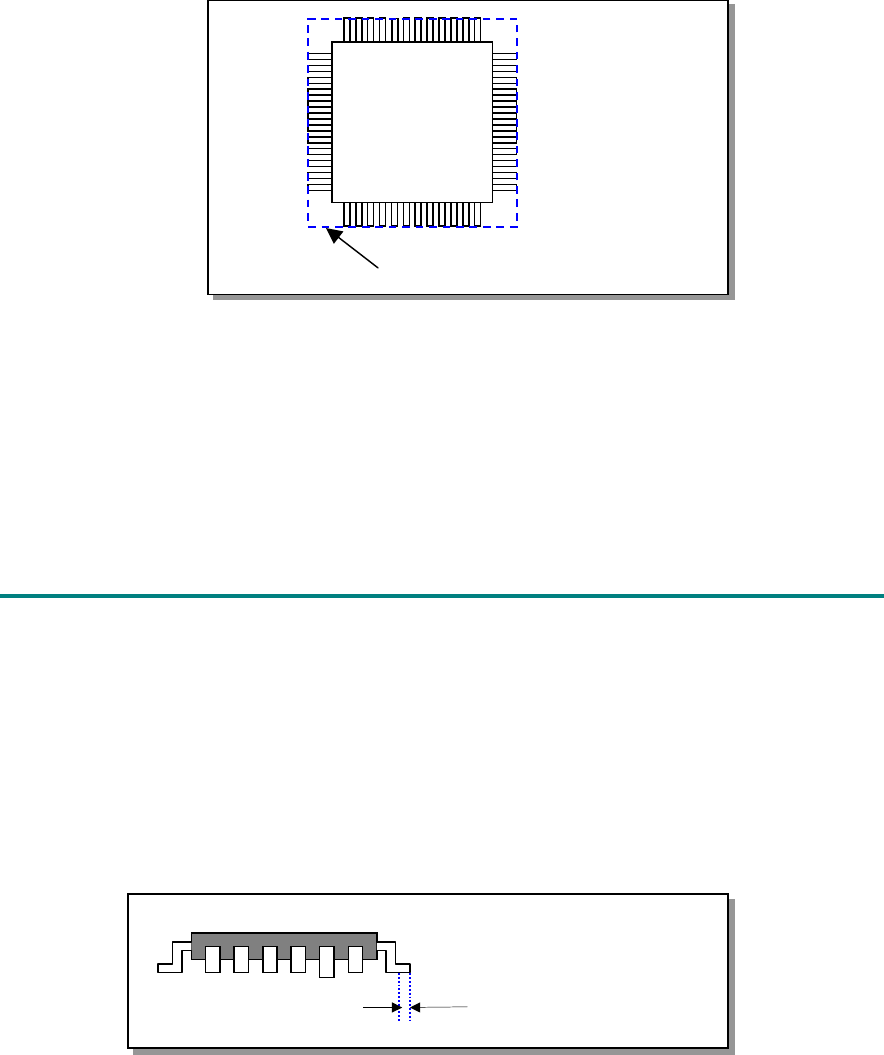
◆ 最小二乗法におけるリード部品のコプラナリティ
最小二乗法における方法は、全ての端子の最下点から最小二乗法により求めた平面がパ
ッケージ本体側から最も離れた端子の最下点に接する平面に対し、最も離れた端子まで
の距離をコプラナリティとします。
図
図図
図 13-13-2-3 最小二乗法によるコプラナリティの算出
最小二乗法によるコプラナリティの算出最小二乗法によるコプラナリティの算出
最小二乗法によるコプラナリティの算出
◆ 最小二乗法におけるボール部品のコプラナリティ(EIAJ に定める方法)
全てのボールの頂点から最小二乗法により求めた平面がパッケージ本体側から最も
離れたボールの頂点に接する平面に対し、最も離れたボールまでの距離をコプラナリ
ティとします。
13
1313
13-
--
-13
1313
13-
--
-2
22
2-
--
-3.
3.3.
3.チェック判定基準
チェック判定基準チェック判定基準
チェック判定基準
■
■■
■
コリニアリ
コリニアリコリニアリ
コリニアリティチェック
ティチェックティチェック
ティチェック(リード部品のみ)
(リード部品のみ)(リード部品のみ)
(リード部品のみ)
ビジョンデータ編集におけるコプラナリティチェック「判定値」を用い、各辺毎のリード上下方
向の曲りをチェックします。
◇
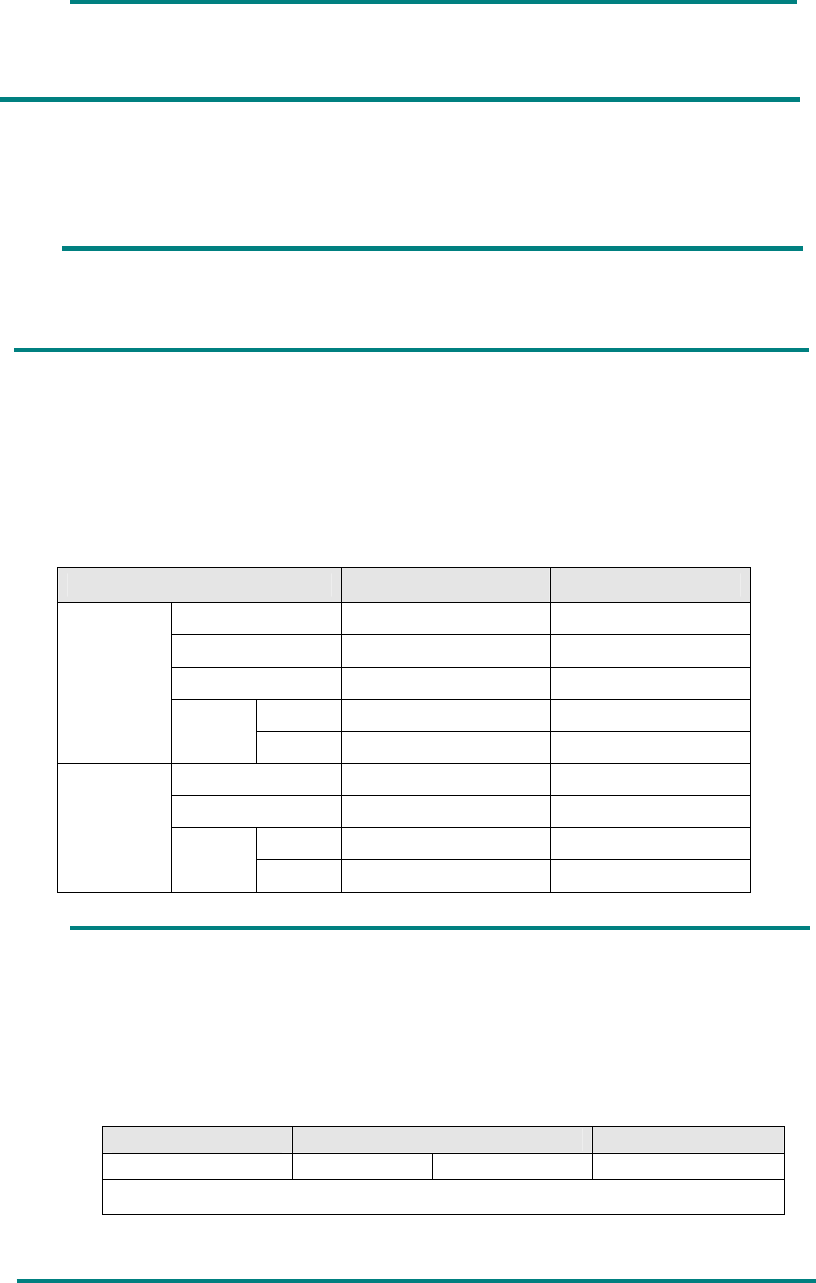
検査する位置はビジョンデータ編集の「スキャン位置オフセット」に設定ができます。
図
図図
図 13-13-2-4 スキャン位置オフセット説明
スキャン位置オフセット説明スキャン位置オフセット説明
スキャン位置オフセット説明
■
■■
■
コプラナリティチェック
コプラナリティチェックコプラナリティチェック
コプラナリティチェック
ビジョンデータ編集におけるコプラナリティチェック「判定値」を用い、リード上下方向の曲り
をチェックします。
スキャン位置オフセット
スキャン位置オフセットスキャン位置オフセット
スキャン位置オフセット
最小二乗法により求められた平面
最小二乗法により求められた平面最小二乗法により求められた平面
最小二乗法により求められた平面
13 - 31
13-13-3.仕様概要
仕様概要仕様概要
仕様概要
(1)対象部品
(1)対象部品(1)対象部品
(1)対象部品
QFP、
、、
、SOP、
、、
、BGA、コネクタ
、コネクタ、コネクタ
、コネクタ
(2)分解能、精度
(2)分解能、精度(2)分解能、精度
(2)分解能、精度
① 分解能 :1μm
② 精度 :±20μm(JUKI 標準ゲージ測定時)
コンタクトプローブの接触痕等により端子に傷のある部品、またリード部品において端
子面の形状が矩形でない場合、測定面の形状が平面でない場合は、正確に判定する事ができな
い場合があります。
(3)測定モード、部品寸法
(3)測定モード、部品寸法(3)測定モード、部品寸法
(3)測定モード、部品寸法
測定モードは標準モードと高精細モードがあります。標準モードは 80mm/s,高精細モード
は 20mm/s
にてセンサ上を走査します。
◇ 以下にモード別の測定可能な部品緒言を示します。
表
表表
表 13-13-1 測定モード
測定モード測定モード
測定モード別の部品寸法
別の部品寸法別の部品寸法
別の部品寸法
項 目 標準モード 高精細モード
ピッチ
0.4mm 以上 0.3mm 以上
リード幅
0.18mm 以上 0.12mm 以上
リード長
0.5mm 以上 0.5mm 以上
一括
26mm×100mm 以下 26mm×50mm 以下
リード部品
部品
サイズ
分割
50mm×100mm 以下 50mm×50mm 以下
ピッチ
0.81mm 以上 0.5mm 以上
ボール径
0.51mm 以上 0.3mm 以上
一括
26mm×100mm 以下 26mm×50mm 以下
ボール部品
部品
サイズ
分割
50mm×100mm 以下 50mm×50mm 以下
◆ 標準モードと高精細モードの切り替え時に、ポリゴンミラーの回転速度切り替
えに“3”秒を要します。従って、標準モードと高精細モードを用いる部品が混
在する生産は、切り替えを行うため生産タクトに影響を及ぼします。
◆ ガルウィングリードはフット部のリード長さが 0.3mm 以上。
◆
◆◆
◆
部品高さ:
機種 KE-2020 KE-2040
部品高さ(MAX) 12mm 20mm 25mm
但し、長辺:50mm 以下、短辺:45mm 以下の時に適用されます。
* [上記部品寸法を超えた時は、“部品高さ:最大 8mm”となります。]
L
※
※※
※
VCS にて認識した場合に限ります。ボール部品(BGA)は、認識種別が全ボール
の指定(全ボール基板、全ボールセラミック)の場合に限ります。また、汎用
ビジョンで作成された部品は適用外となります。
L