OM-1076-001.pdf - 第41页
A02 Control Data (A02_04), (A02_05) 0206-002 2-22 Tg0502-PM-CL (A02_04) Pickup Pos Correction X [mm], Y [mm] Enter the coordinates of component pickup position based on the tape reference position. Determine which sign (…
A02 Control Data (A02_03)
0107-001 2-21 Tg0502-PM-CL
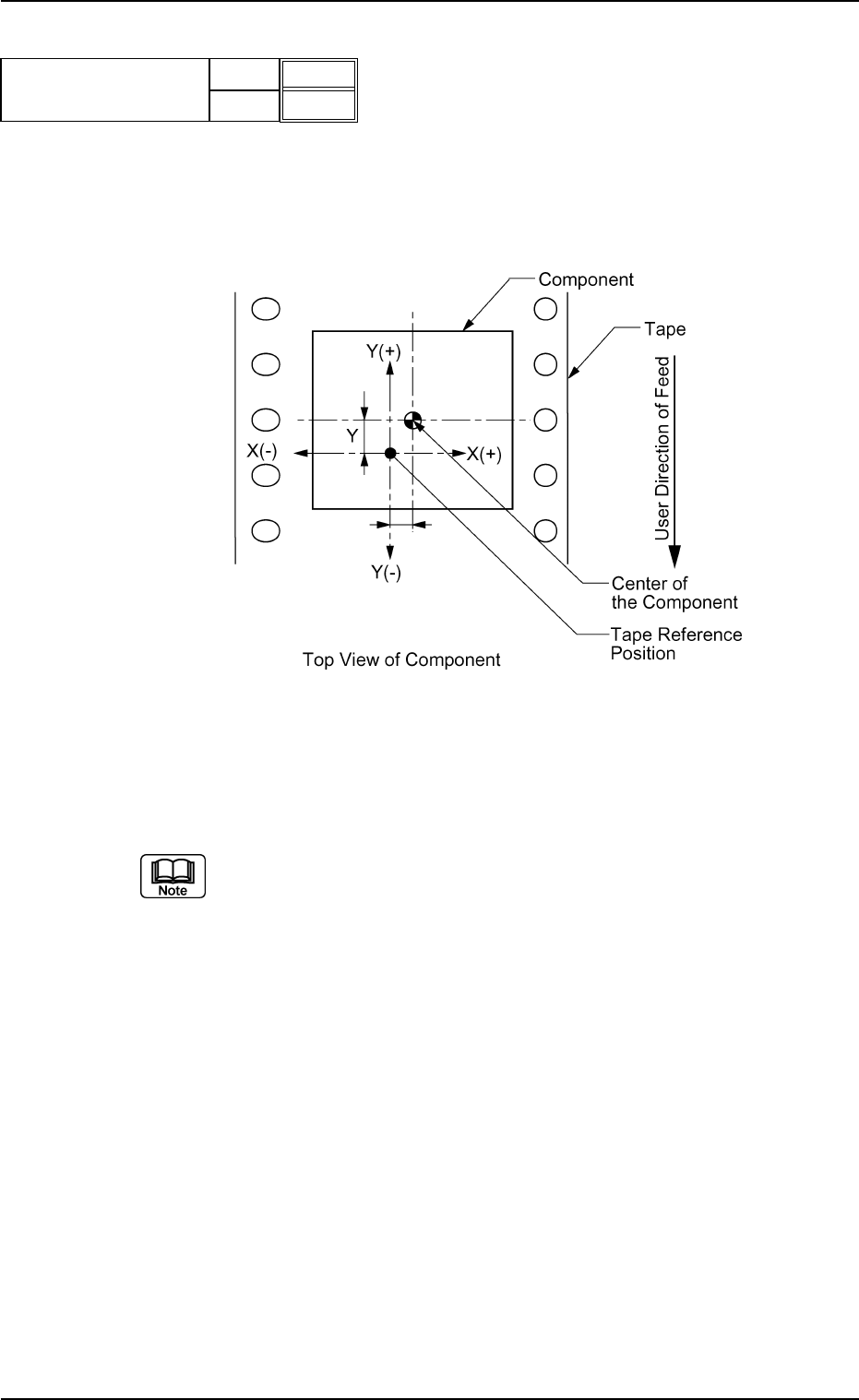
(A02_03) Cmpnt Pos Correction X [mm], Y [mm]
Set the center (coordinate) of a component based on the tape refer-
ence position.
Whether the value with "+" sign or "−" sign should be entered will be
determined according to the following coordinate.
Unit: mm
Data Input Range: −99.9 to +99.9
(a) The reference positions for component pick-up are specified for each
individual feeder No. However, a reference position may deviate from
the center of a component packaged in the tape. In this case, it is
necessary to enter parameters to correct the deviation.
(b) Actual operation range may be regulated (differ from the set values)
due to the control of the machine.
X[mm]
Y[mm]
+0.0
+0.0
Fig.B32
Cmpnt pos correction
Fig. B33
A02 Control Data (A02_04), (A02_05)
0206-002 2-22 Tg0502-PM-CL
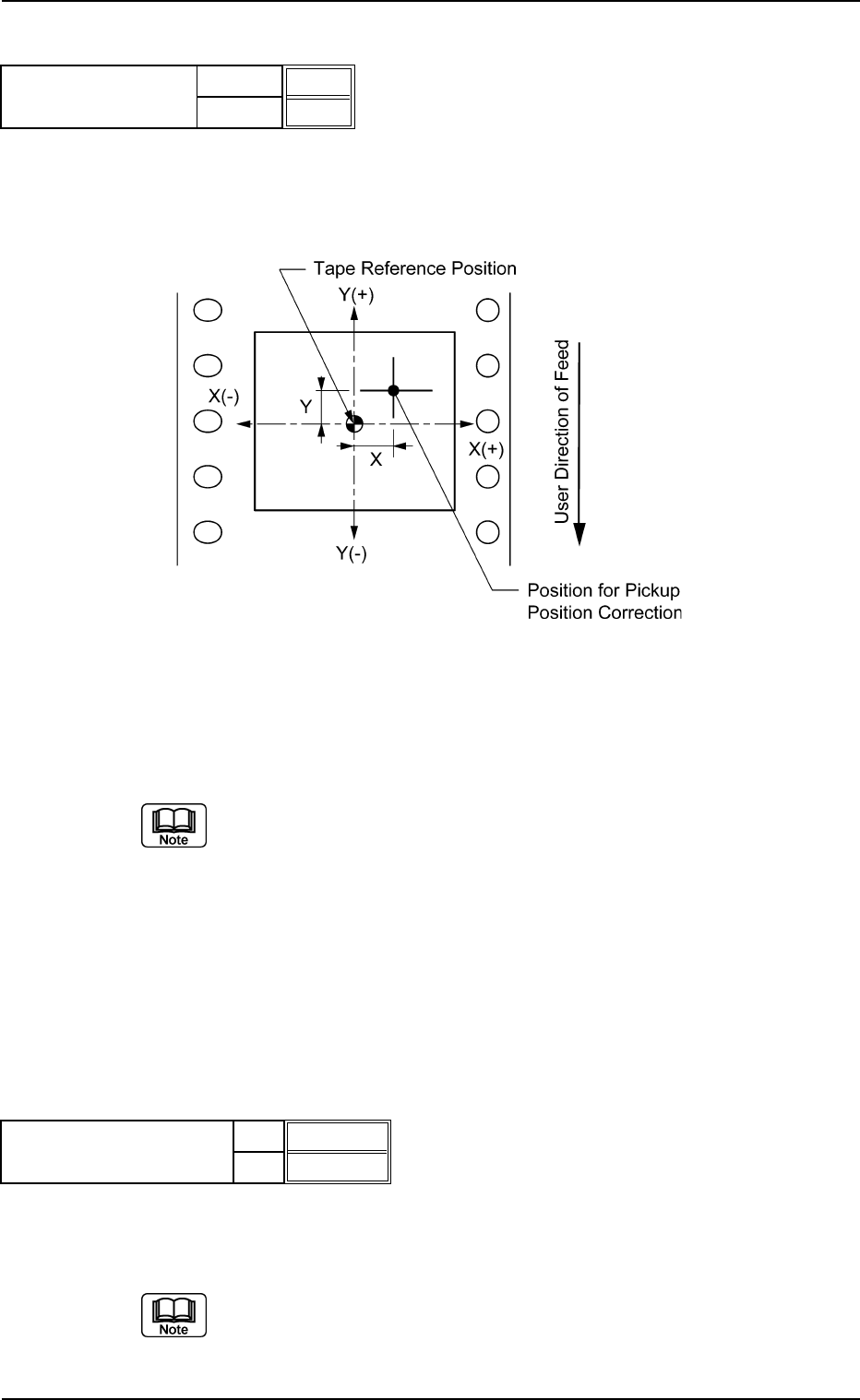
(A02_04) Pickup Pos Correction X [mm], Y [mm]
Enter the coordinates of component pickup position based on the tape
reference position.
Determine which sign (+) or (−) should be used according to the fol-
lowing coordinate system.
Top View of Component
Unit: mm
Data Input Range: −99.9 to +99.9
(a) When a component has a groove, a protrusion, etc., and cannot be
picked up at the center without any hindrance, the pickup position
can be shifted deliberately from the center of component according
to the set parameters. In this case, the automatic feeder axis adjust-
ment function for the pickup position works such that the corrected
position is maintained.
(b) Actual operating range may be regulated (different from the set val-
ues) due to the control of the machine.
(A02_05) Auto Fdr Axis Adjustment X, Y
Select "Enable" or "Disable" to determine whether or not the auto-
matic feeder axis adjustment function should be used.
This function statistically processes the difference between the nozzle
and component center positions calculated at component recognition and
is used to follow up and correct the "Feeder (B) offset".
X
Y
Enable
Enable
Fig. B36
Auto fdr axis adjustment
X [mm]
Y [mm]
+0.0
+0.0
Fig. B34
Pickup pos correction
Fig. B35
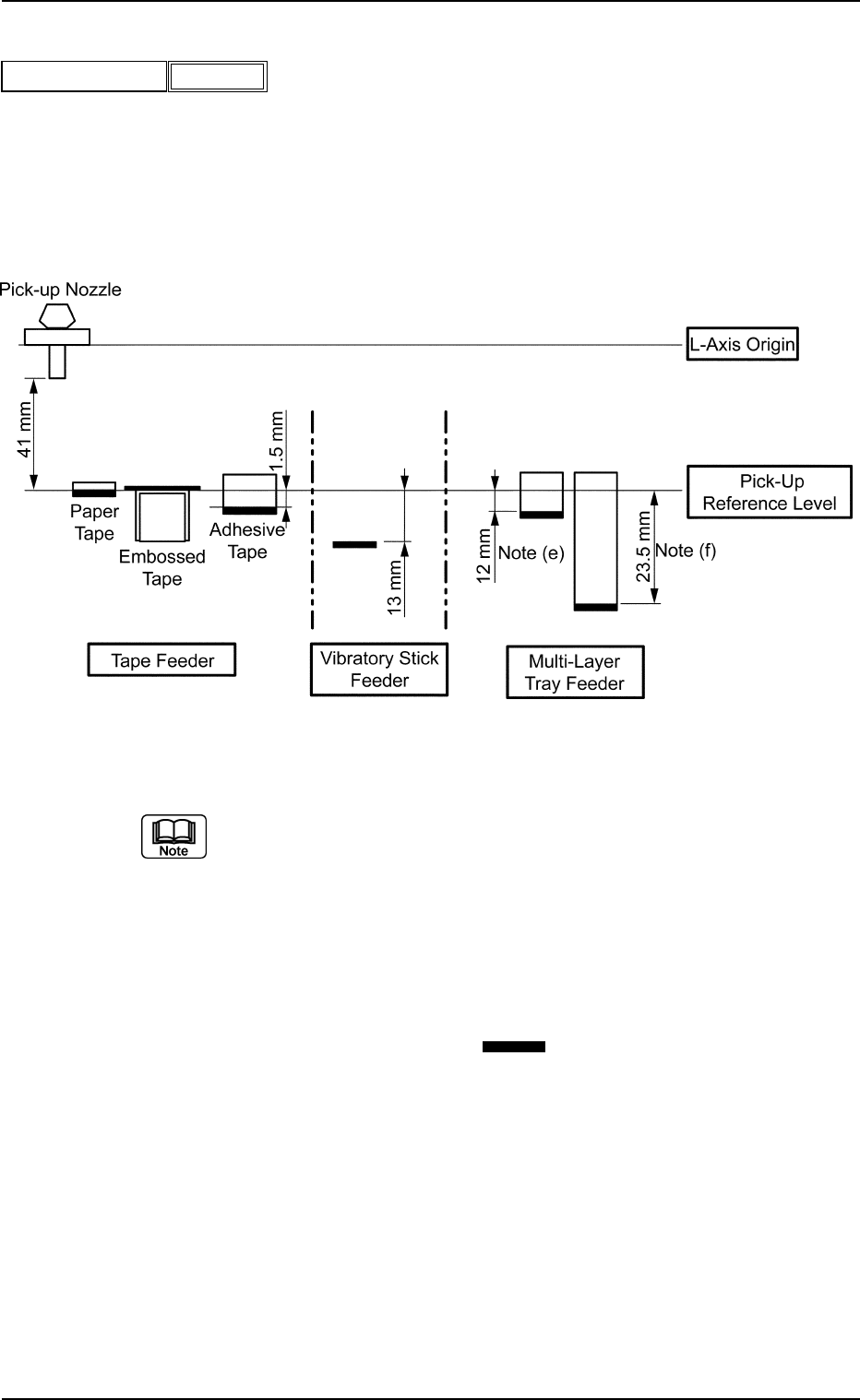
(A02_06) Pickup Level [mm]
Set a parameter to adjust the head descending level for component
pick-up.
Unit: mm
Data Input Range: −99.99 to +99.99
A02 Control Data (A02_06)
0107-001 2-23 Tg0502-PM-CL
Fig.B37
Pickup level [mm]
−99.99
Fig. B38
(a) When an embossed tape is used, a gap may be left between the
head and the packaged component, depending on the relation be-
tween the depth of the cavity and the thickness of the component in
the cavity. In that event, set a parameter in the data box to adjust the
head descending stroke.
(b) To increase the stroke for component pick-up (to make the head de-
scend further), set a parameter with a "+" sign.
(c) Consider the thickness (t) of the components (the distance from the
lower surface references ( ) shown in the figure) except for the
embossed tape and figure out the pick-up level. (Various groups of
offset data must also be taken into consideration separately).
(d) Actual operation range may be regulated (differ from the set values)
due to the control of the machine.
(e) Maximum Thickness of Tray at Pull-out to Upper Chute
: Max. 16.5 mm
(f) Maximum Thickness of Tray at Pull-out to Lower Chute (Option)
: Max. 28 mm
Side View