XPF-L 服务工程师训练手册中文版.pdf - 第60页
4. 当 Z 轴移动挡块松开,降下 Z 轴到能吸取圆盘治具的高度。 5. 选择 [Custom Ma intenance] – [I/O Check] – [RY01 B: VacuumPumpOn] – [ON] ,打开 真空泵。 6. 选择 [Y010 VacuumOff] – [OFF] ,打 开贴装头吸嘴真空。 7. 贴装头装上圆盘 治具。 8. 释放 Z 轴移动挡块,手动 升起 Z 轴使圆盘治具接触到工作头下表面。 10. 选…
4. 贴装头装上吸嘴治具,贴装头移动到玻璃治具放置平台位置。
5. 按下紧急停止按钮,切断200V伺服电源。
6. 用小6角棒按住Z轴移动挡块电磁阀开关,释放Z轴移动挡块。
7. 当Z轴移动挡块松开,降下Z轴使吸嘴治具接触到玻璃治具放置平台表面。
8. 选择[Custom Maintenance] – [Proper Data Editor] – [Machine Origin] –
[Z_BoardSurface] – [Direct Servo Input] – [OK] ,保存当前Z轴伺服位置到固有值。
8. 从机器移除治具。
6.7 测定自动旋转头释放高度
要求治具:
1. 把维修模式钥匙转到“ON”,然后选择[Maintenance] – [Jog],进入维修保养模式移动界面。
2. 按下紧急停止按钮,切断200V伺服电源。
3. 用小6角棒按住Z轴移动挡块电磁阀开关,释放Z轴移动挡块。
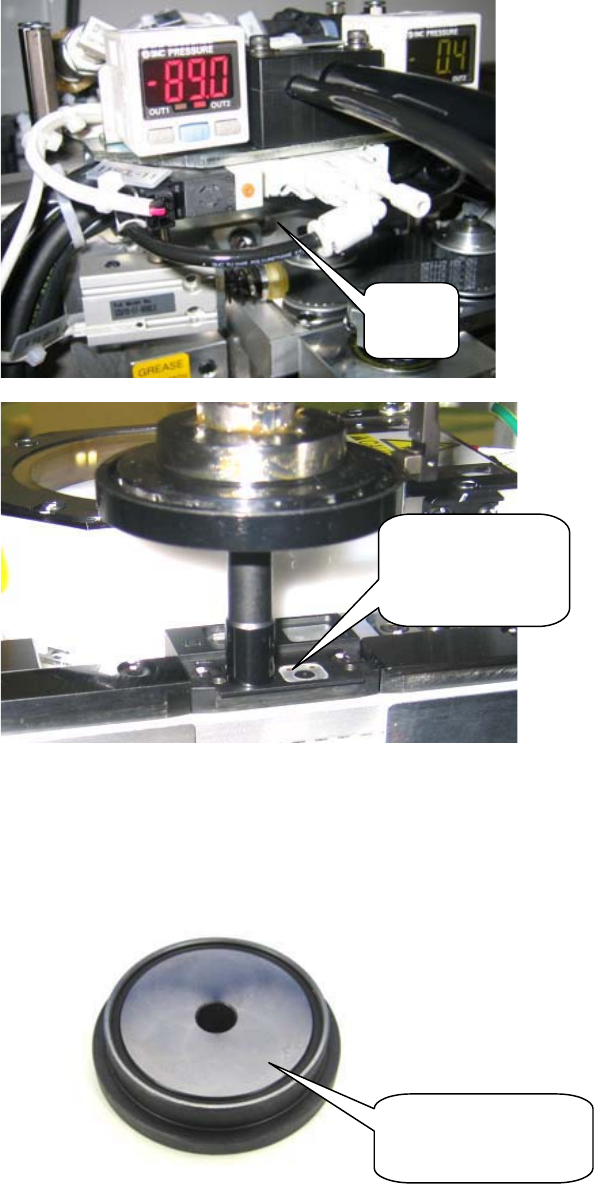
按这里
吸嘴接触到玻璃
治具放置平台表
面
圆盘治具:
Z3002GGPJ0060
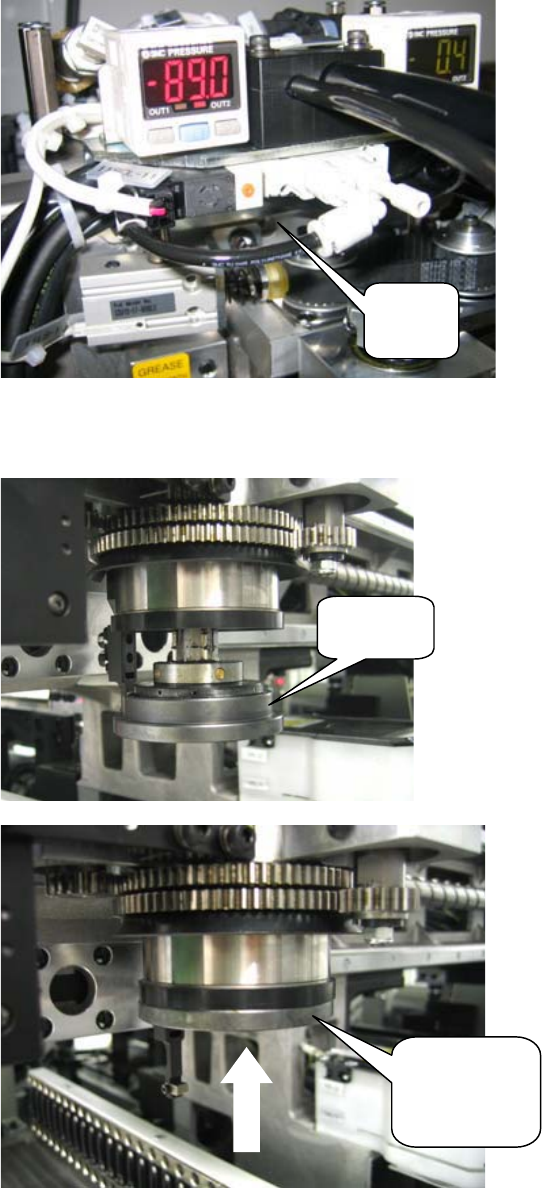
4.当Z轴移动挡块松开,降下Z轴到能吸取圆盘治具的高度。
5. 选择[Custom Maintenance] – [I/O Check] – [RY01B: VacuumPumpOn] – [ON],打开真空泵。
6. 选择 [Y010 VacuumOff] – [OFF] ,打开贴装头吸嘴真空。
7. 贴装头装上圆盘治具。
8. 释放Z轴移动挡块,手动升起Z轴使圆盘治具接触到工作头下表面。
10. 选择 [Custom Maintenance] – [Proper Data Editor] – [Machine Origin] –
[Z_RevolverUnitResetHeight] – [Direct Servo Input] – [OK] ,保存当前Z轴伺服位置到固有值。
6.8 测定吊钩提升高度
要求治具:
按这里
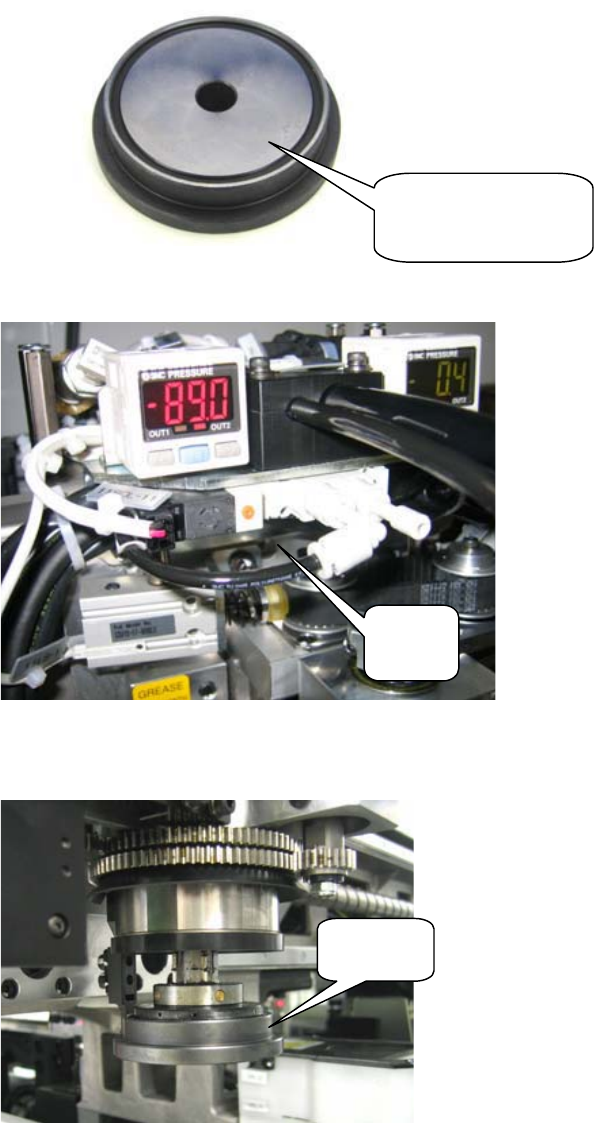
圆盘治具
圆盘治具接
触到工作头
下表面。
1. 把维修模式钥匙转到“ON”,然后选择[Maintenance] – [Jog],进入维修保养模式移动界面。
2. 按下紧急停止按钮,切断200V伺服电源。
3. 用小6角棒按住Z轴移动挡块电磁阀开关,释放Z轴移动挡块。
4.当Z轴移动挡块松开,降下Z轴到能吸取圆盘治具的高度。
5. 选择[Custom Maintenance] – [I/O Check] – [RY01B: VacuumPumpOn] – [ON],打开真空泵。
6. 选择 [Y010 VacuumOff] – [OFF] ,打开贴装头吸嘴真空。
7. 贴装头装上圆盘治具。
8. 释放Z轴移动挡块,手动下降Z轴使圆盘治具接触到吊钩表面。
圆盘治具:
Z3002GGPJ0060
按这里
圆盘治具