19120261-CY_A00《SV670系列标准型伺服驱动器》20230307_Web.pdf - 第14页
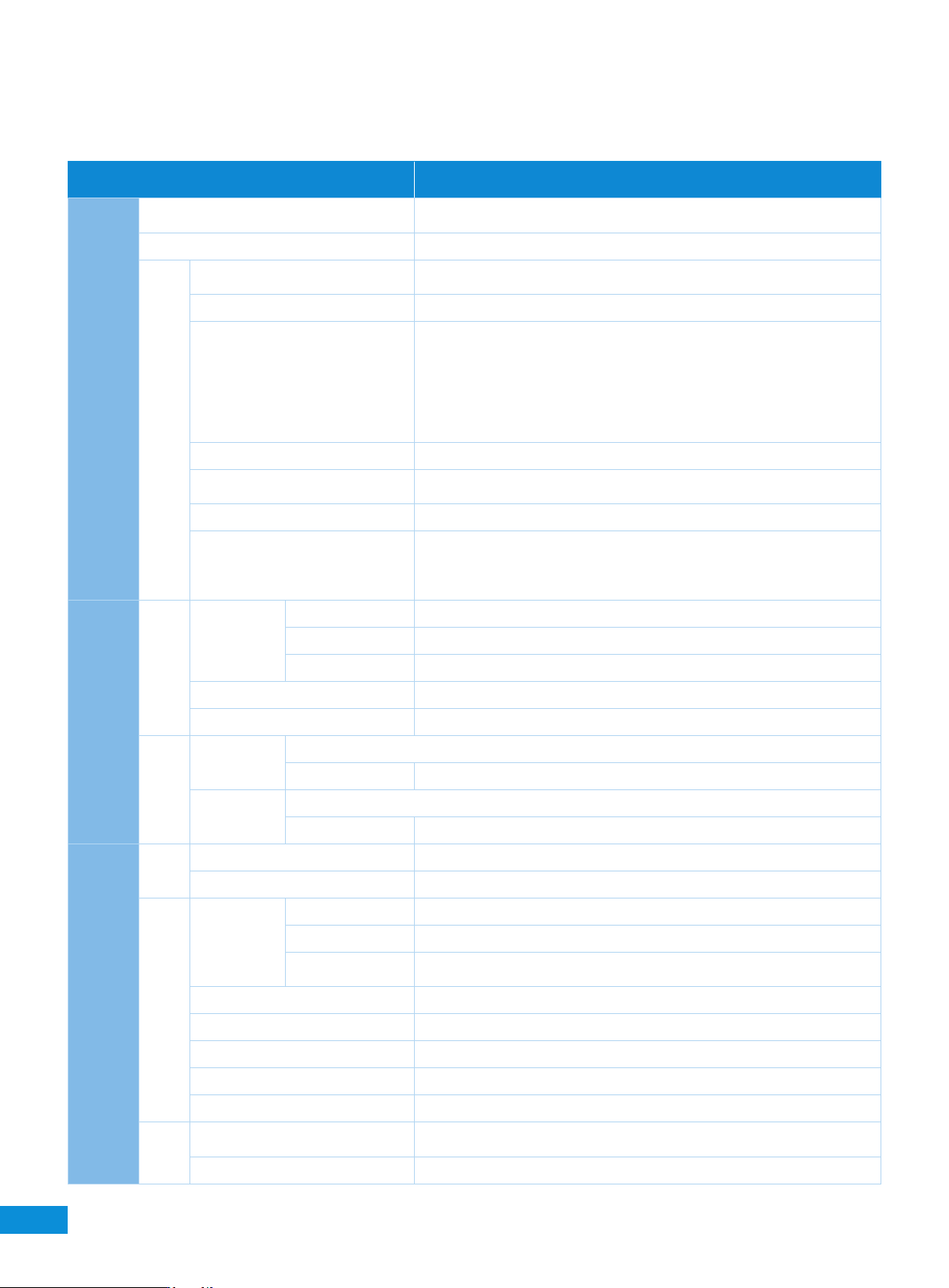
伺服驱动器通用规格 项目 描述 输入输出 信号 数字 输入 信号 输入信号 功能选择 8路D I DI1 ~ DI6 数字信号输入最高频率 1kHz ( 限流电阻大于 2.4kΩ 时会下降 ) DI7 ~ DI8 数字信号输入硬 件延迟小于 1ms ( 限流电阻为 2.4kΩ) DI 功能如下: 伺服使能、 报警复位、 增益切换、 指令切换、 模式切换、 零位固定使能、 位置指令禁止、 脉冲指令禁止、 正向超程、反向超程、速度限制、转矩…
伺服驱动器通用规格
项目 描述
基本规格
控制方式
IGBT PWM 控制,正弦波电流驱动方式
220V、380V:单相或三相全桥整流
编码器反馈 23 位多圈绝对值编码器 ( 不接电池可作为增量式编码器使用 )
使用
条件
使用 / 存储温度
[1]
0℃ ~+55℃ ( 环境温度在 45℃ ~55℃ 时,平均负载率请勿超过 80% )
( 不冻结 )/ -40℃ ~+70℃
使用 / 存储湿度 90%RH 以下 ( 不结露 )
抗振动强度
运行:
●
5Hz~8.4Hz:3.5mm 位移
●
8.4Hz~200Hz:1g
产品包装:
●
5Hz~100Hz:0.01g
2
/Hz
●
200Hz:0.001g
2
/Hz
●
Grms=1.14g
抗冲击强度 19.6m/s
2
防护等级
IP20
备注:除端子 (IP00) 外
污染等级 PD2 级
海拔高度
最高海拔到 2000m。
●
1000m 及以下使用无需降额
●
1000m 以上每升高 100m 降额 1%
●
海拔超过 2000m 请联系汇川技术
速度转矩
控制模式
性能
速度
变动率
[2]
负载变动率 0~100% 负载时:0.5% 以下 ( 在额定转速下 )
电压变动率 额定电压 ±10%:0.5% ( 在额定转速下 )
温度变动率 25±25℃:0.5% 以下 ( 在额定转速下 )
速度控制范围 1:7000(速度控制范围的下限是在额定转矩负载时不停止的前提条件下)
软启动时间设定 0 ~ 65s ( 可分别设定加速与减速 )
输入
信号
速度指令输入
模拟量输入信号;数字量输入信号;使用 DI 信号组合实现第 0~15 段速度选择
CANopen 通讯模式 PV 模式
转矩指令输入
模拟量输入信号;数字量输入信号
CANopen 通讯模式 PT 模式
位置控制
模式
性能
前馈补偿 0~100.0% ( 设定分辨率 0.1% )
定时窗口 1~65535 编码器单位
输入
信号
脉冲指令
输入脉冲形态 包含“方向 + 脉冲”、“A、B 相正交脉冲”、“CW/CCW 脉冲”三种指令形态
输入形态 差分输入;集电极开路
输入脉冲频率
差分输入:单路 4Mpps,正交 8Mpps,脉宽不能低于 0.125us
集电极开路:单路最大脉冲频率 200Kpps,脉宽不能低于 2.5us
内置集电极开路用电源
[3]
+24V ( 内置 2.4kΩ 电阻 )
多段位置指令选择 使用 DI 信号组合实现第 0~15 段位置选择。( 可设定其他端子为此功能 )
工艺段指令选择 使用 DI 信号组合或数字设定实现工艺控制
CANopen 通讯模式 PP 模式 /HM 模式 /IP 模式
CANlink 通讯模式 轴控指令
位置
输出
输出形态
A 相 /B 相:差分输出
Z 相:差分输出或集电极开路输出
分频比 任意分频
SV670P 规格
伺服驱动器通用规格
SV670P 规格
9
SV670 系列标准型伺服驱动器
伺服驱动器通用规格
项目 描述
输入输出
信号
数字
输入
信号
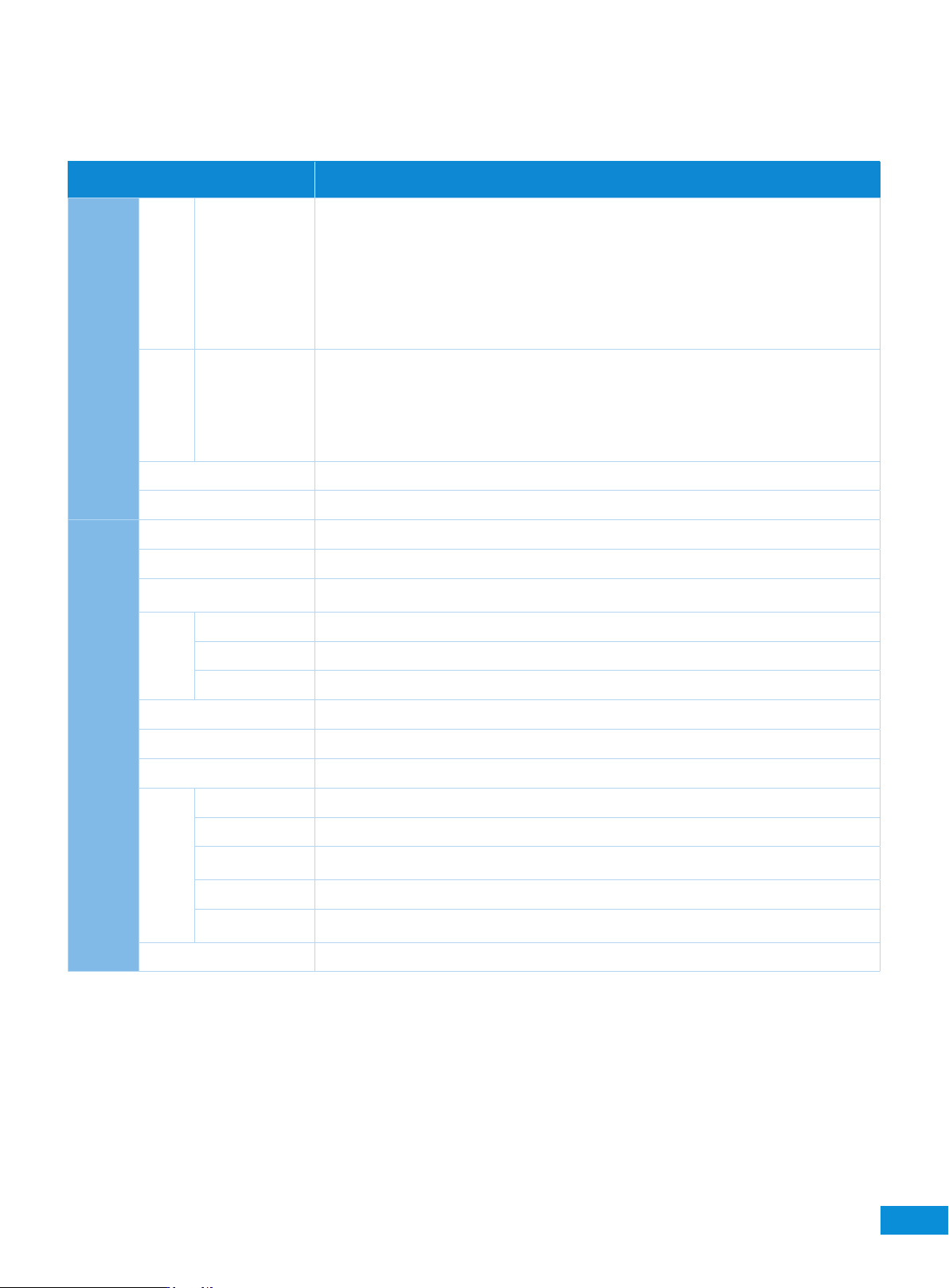
输入信号
功能选择
8路DI
DI1 ~ DI6 数字信号输入最高频率 1kHz ( 限流电阻大于 2.4kΩ 时会下降 ) DI7 ~ DI8 数字信号输入硬
件延迟小于 1ms ( 限流电阻为 2.4kΩ)
DI 功能如下:
伺服使能、报警复位、增益切换、指令切换、模式切换、零位固定使能、位置指令禁止、脉冲指令禁止、
正向超程、反向超程、速度限制、转矩限制、正反向点动、步进量使能、手轮切换、电子齿轮选
择、指令方向设定、原点开关、回原使能、以当前位置为原点、紧急停机、多段位置、中断定长、
轴控指令、工艺段、位置偏差清除、定位和指令完成信号清除
数字
输出
信号
输出信号
功能选择
5 路 DO,DO 带载能力 50mA ,电压范围 5V~30V
DO 功能如下:
伺服准备好、电机旋转信号、零速信号、速度一致、速度到达、转矩到达、定位完成、定位接近、
转矩受限、速度受限、抱闸、警告输出、故障输出、警告或故障输出、中断定长完成、原点回零完成、
电气回零完成、使能完成、内部指令完成、允许写下段指令、内部运动完成、比较输出、闭环状态、
通讯强制输出、EDM 输出
模拟量输入信号 AI1 电压型输入规格:12bit,-10V~+10V;最大允许电压:±12V
模拟量输出信号 AO1 电压输出范围:-10V~+10V
内置功能
超程 (OT) 防止功能 P-OT、N-OT 动作时立即停止
电子齿轮比 0.001 ≤ B/A ≤ 3355443.2
保护功能
过电流、过电压、电压不足、过载、主电路检测异常、散热器过热、电源缺相、过速、编码器异常、
CPU 异常、参数异常、其他
安全
功能
输入信号功能选择 STO1、STO2:功能安全模块的输入封锁信号
输出 EDM:功能安全模块的安全输出信号
适用标准 IEC 61800-5-2:2016
LED 显示功能 主电源 CHARGE,5 位 LED 显示
振动抑制功能 具有 5 个陷波器,50Hz ~ 8000Hz,其中 2 个可自适应设置
易用性功能 一键式参数调整、自适应参数调整、速度观测器,模型跟踪
通讯
功能
后台调试 Type_C
多站通信协议 RS485、CANopen、CANlink
多站通信轴数
RS485 时, 最大为 32 站;
CANopen 和 CANlink 时,最大为 127 站
轴地址设定 无物理旋钮,通过软件设置
功能
状态显示、用户参数设定、监视显示、警报跟踪显示、JOG 运行与自动调谐操作、速度 / 转 矩指
令信号等的测绘功能;通讯与运动控制指令给定
其他 增益调整、警报记录、JOG 运行
●
[1] 在该范围的环境温度下使用伺服驱动器。在电柜内放置保存时,也应保持该范围的环境温度。
●
[2] 速度变动率由下式定义:速度变动率= ( 空载转速-满载转速 )÷ 额定转 速 ×100%。
由于电压变化、温度变化会引起放大器偏差,导致演算电阻值发生变化。因此,该影响会通过转速的变化表现出来。
该转速的变化根据额定转速的比率来表示,分别为由电压变化与温度变化引起的速度变动率。
●
[3] 内置集电极开路用电源并未与伺服驱动器内的控制电路进行电绝缘。
注:
SV670P 规格
SV670 系列标准型伺服驱动器
10
SV670N 规格
伺服驱动器通用规格
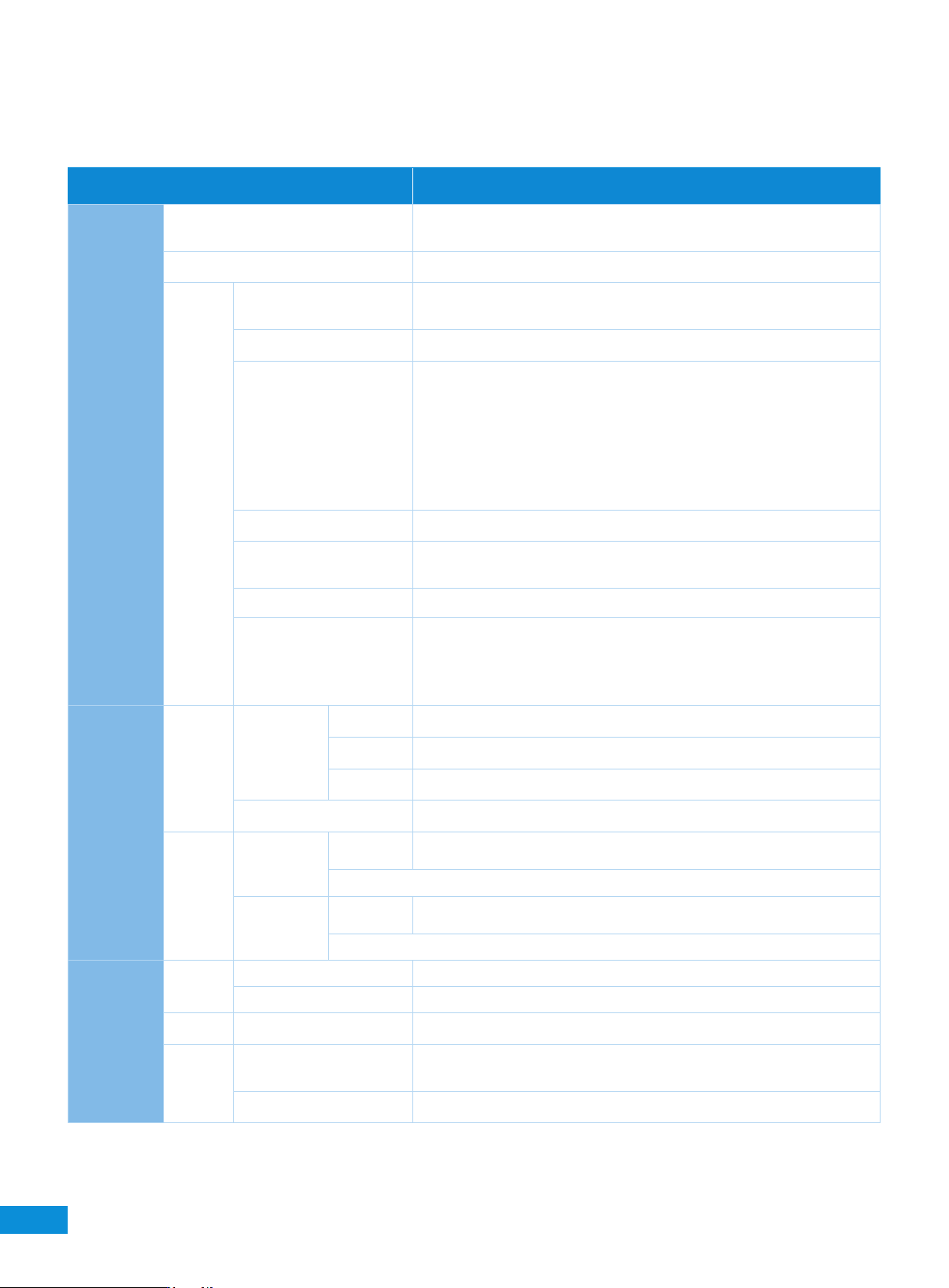
项目 描述
基本规格
控制方式
IGBT PWM 控制,正弦波电流驱动方式
220V、380V:单相或三相全桥整流
编码器反馈 23 位多圈绝对值编码器 ( 不接电池可作为增量式编码器使用 )
使用条件
使用 / 存储温度
[1]
0℃ ~+55℃ ( 环境温度在 45℃ ~55℃ 时,平均负载率请勿超过 80% )
( 不冻结 )/ -40℃ ~+70℃
使用 / 存储湿度 90%RH 以下 ( 不结露 )
抗振动强度
运行:
●
5Hz~8.4Hz:3.5mm 位移
●
8.4Hz~200Hz:1g
产品包装:
●
5Hz~100Hz:0.01g
2
/Hz
●
200Hz:0.001g
2
/Hz
●
Grms=1.14g
抗冲击强度 19.6m/s
2
防护等级
IP20
备注:除端子 (IP00) 外
污染等级 PD2 级
海拔高度
最高海拔到 2000m
●
1000m 及以下使用无需降额
●
1000m 以上每升高 100m 降额 1%
●
海拔超过 2000m 请联系汇川技术
速度转矩
控制模式
性能
速度变动率
[2]
负载变动率 0~100% 负载时:0.5% 以下 ( 在额定转速下 )
电压变动率 额定电压 ±10%:0.5% ( 在额定转速下 )
温度变动率 25±25℃:0.5% 以下 ( 在额定转速下 )
速度控制范围 1:7000 ( 速度控制范围的下限是额定转矩负载时不停止的条件 )
输入信号
速度指令输入
EtherCAT
通讯模式
CSV/PV 模式
模拟量给定;数字量给定
转矩指令输入
EtherCAT
通讯模式
CST/PT 模式
模拟量给定;数字量给定
位置控制
模式
性能
前馈补偿 0~100.0% ( 设定分辨率 0.1% )
定时窗口 1~65535 编码器单位
输入信号 EtherCAT 通讯模式 CSP 模式 /PP 模式 /HM 模式
位置输出
输出形态
A 相 /B 相:差分输出
Z 相:差分输出或集电极开路输出
分频比 任意分频
11
SV670 系列标准型伺服驱动器