1OM-1609-004_w.pdf - 第173页
1OM-1609 4-3 4 章 1. 仕 様 1007-003 項 目 内 容 基板全体補正用の例 認識精度を上げるため、 2 点認識の場合は基板認識マークを対角位置に配 置してください。 また、 3 点認識の場合は、 2 か所は対角位置に、 もう 1 か所は残りのコーナー 近辺に配置してください。 部品装着点補正用の例 1 ( 1 点認識 ) 部品装着点中心またはその周辺近傍の任意の 1 点に基板認識マークを配 置してください。 推…
1OM-1609
4-2
4 章 1. 仕 様
1007-003
項 目 内 容
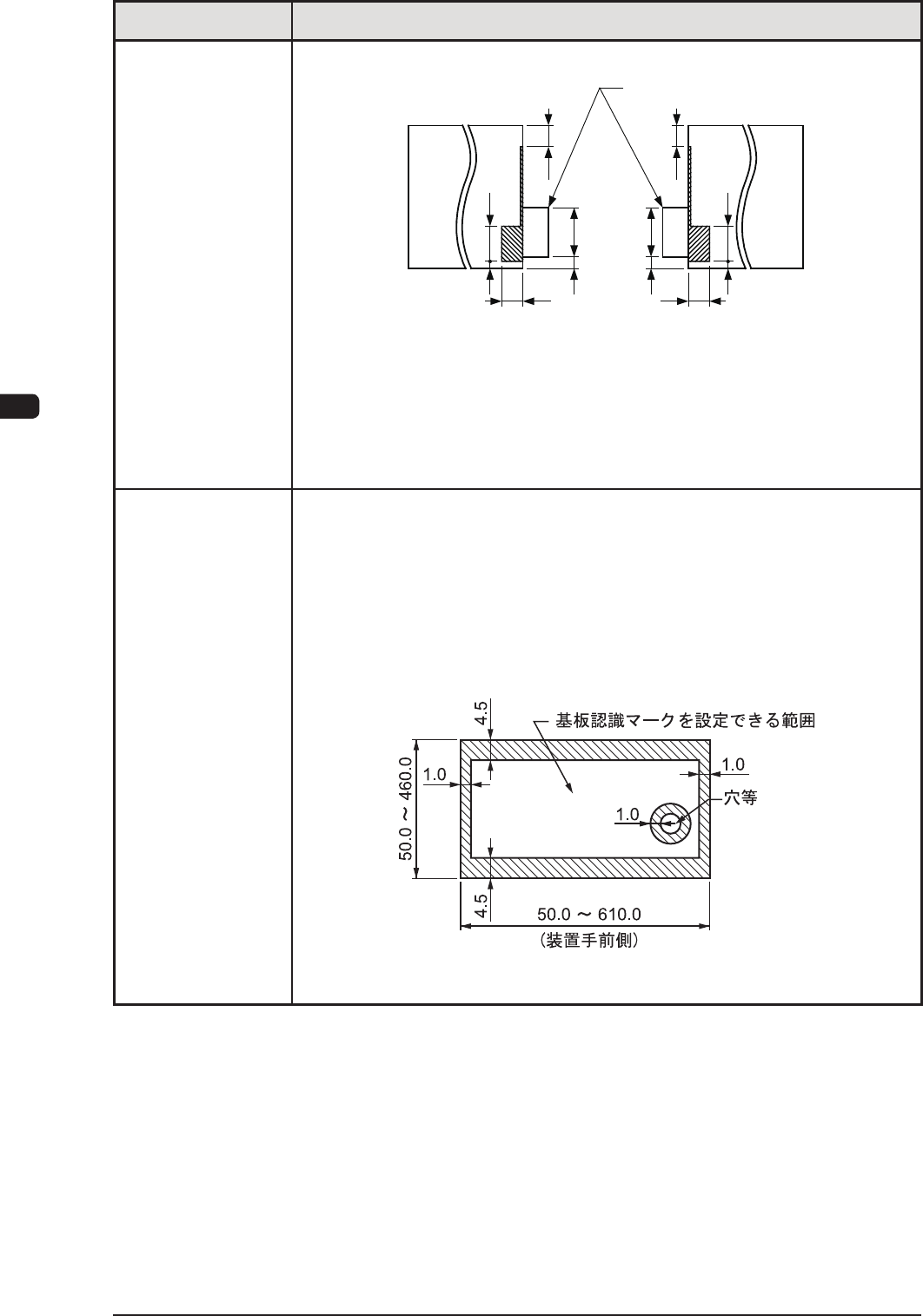
7.
基板の切欠き
および穴の制限
3 0 .5
1 5
9
2 55
基板流れ方向
右 → 左
1 5
3 0 .5
9
2 55
1 5
基板流れ方向
左 → 右
1 5
基板ストッパ
単位
: mm
注
:
斜線部が、切欠き不可の範囲です。
斜線部に切欠きおよび穴がある場合は、基板位置決めティーチングモー
ドで正常に基板が位置決めできるか確認してください。
8.基板位置補正
方法
基板認識
•
基板認識マークを基板認識カメラで認識することにより、基板全体の位置
ズレ量および基板印刷パターンの伸びを補正します。
•
基板全体補正用には、基板上 ( ゾーン
1
~
5
) に
2
か所または
3
か所基板
認識マークを設定
( 多面取り基板の場合は各基板毎に
2
か所 ) します。
•
部品装着点補正用には、基板上に
1
~
2
か所基板認識マークを設定します。
この場合には、点対称となる基板認識マーク
2
か所の重心位置が部品装着
点中心となるように設定することを推奨します。
単位
: mm
1OM-1609
4-3
4 章 1. 仕 様
1007-003
項 目 内 容
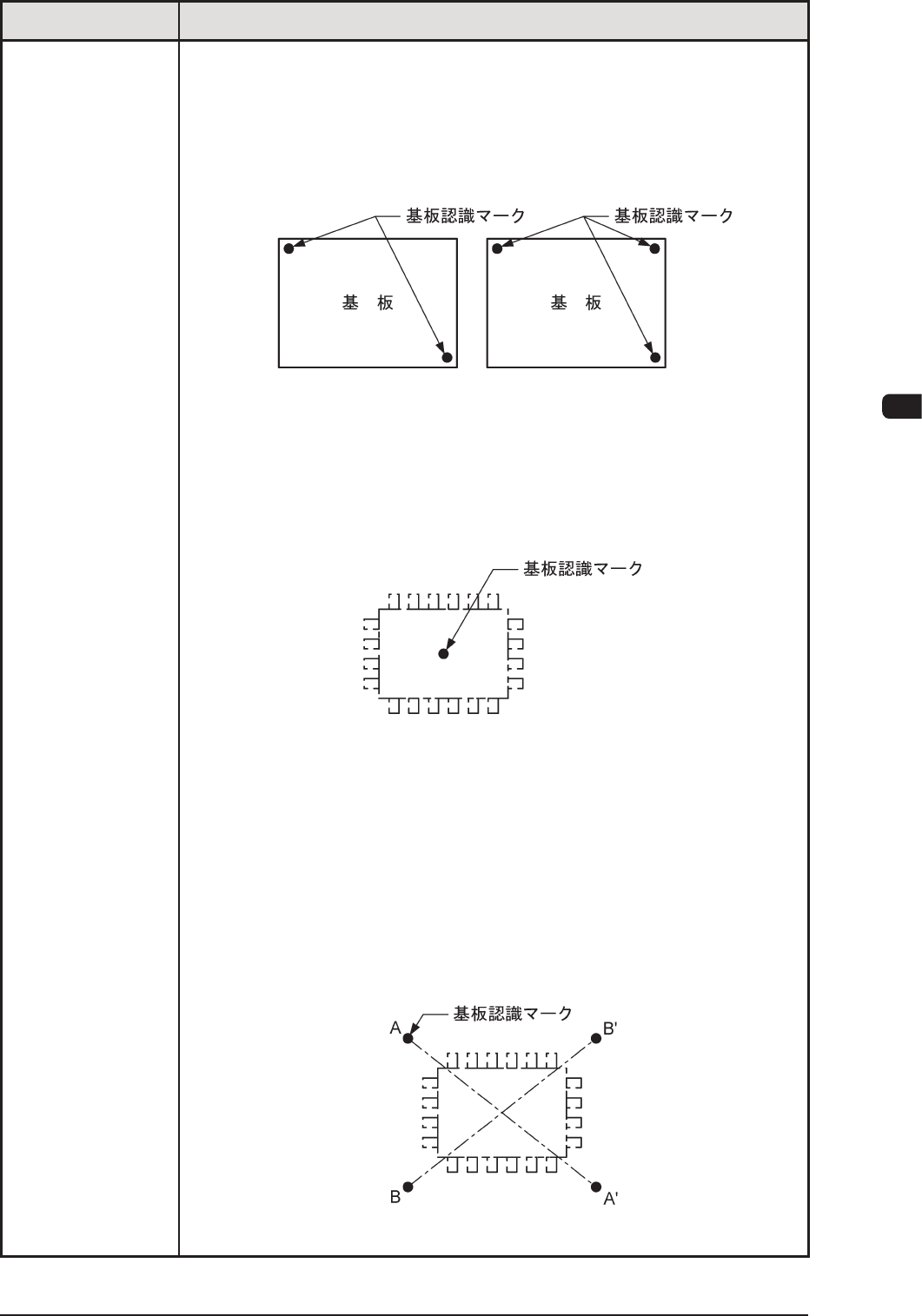
基板全体補正用の例
認識精度を上げるため、
2
点認識の場合は基板認識マークを対角位置に配
置してください。
また、
3
点認識の場合は、
2
か所は対角位置に、もう
1
か所は残りのコーナー
近辺に配置してください。
部品装着点補正用の例
1
(
1
点認識 )
部品装着点中心またはその周辺近傍の任意の
1
点に基板認識マークを配
置してください。
推奨位置
:
部品装着点中心
部品装着点補正用の例
2
(
2
点認識 )
部品装着点中心近傍の任意の
2
点に基板認識マークを配置してください。
推奨位置
:
点対称
部品装着点中心に対し、点対称となる
2
点を推奨いたします。
(
A-A’ / B-B’
)
•
本基板認識マーク
(
2
点 )
により部品装着位置および角度が補正されま
す。
なお、
2
点認識は、局所的な印刷パターンのズレおよび歪みに有効です。
1OM-1609
4-4
4 章 1. 仕 様
1007-003
項 目 内 容
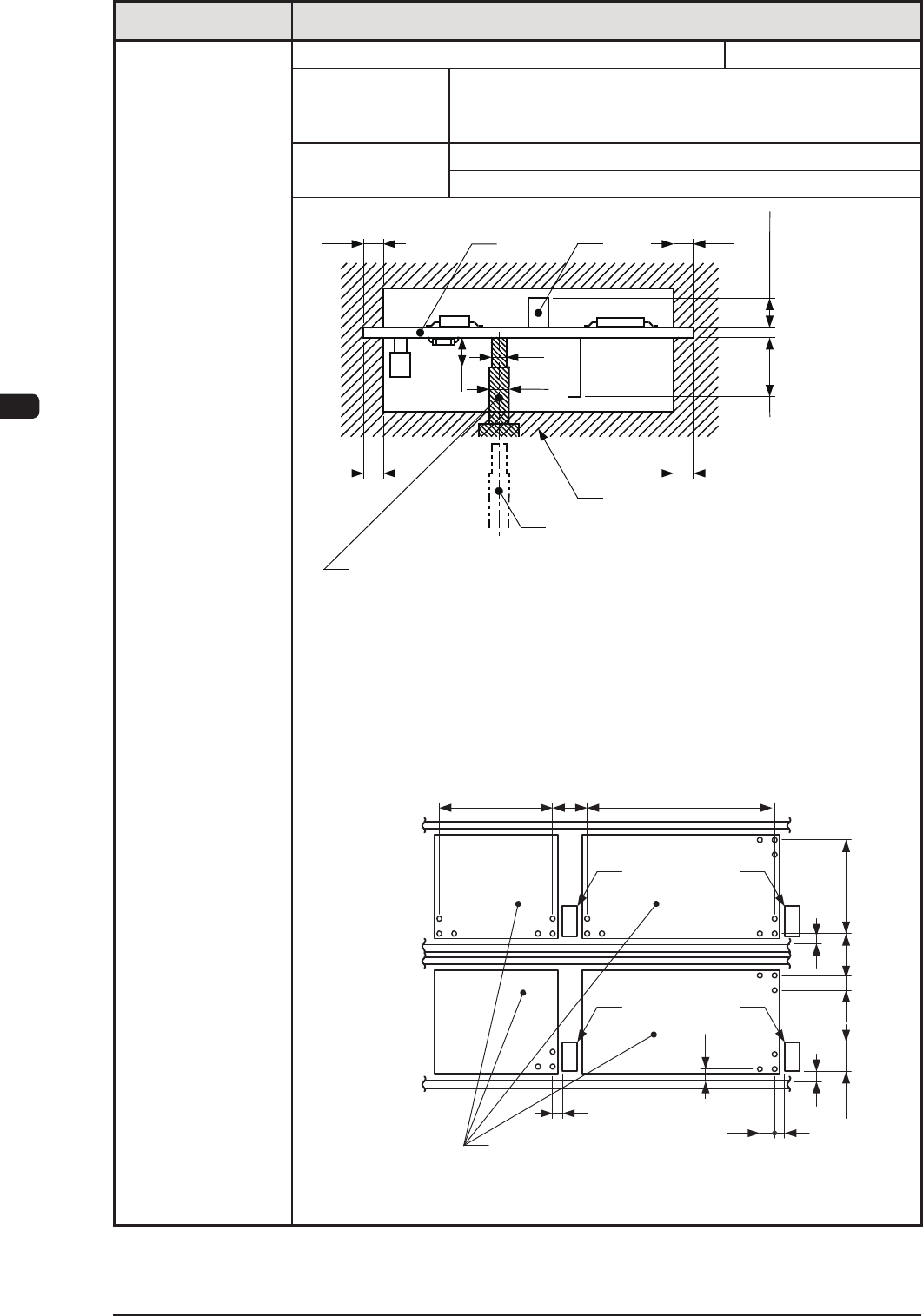
9.装着前の基板条
件
( 部品高さ制限 )
デュアル搬送モード シングル搬送モード
先付け部品高さ 上面
12
.7 mm /
高速ヘッド
25.4 mm /
多機能ヘッド
下面
30 mm
デッドスペース 上面
3.0 mm
下面
3.0 mm
3 .0
基板
基板バックアップピン
(基板搬送時を示します)
先付部品装着不可能範囲
部品
3 .0
基板バックアップピン(数か所)
φ5
装
置
手
前
側
φ2
4.0
3 .0 3 .0
高速ヘッド時
M ax . 1 2.7
多機能ヘッド時
M ax . 2 5.4
M ax . 30
単位
: mm
注
:
(
a
)
図は、基板をバックアップした状態を示します。
(
b
)
基板バックアップピンを、装着済部品と触れない位置に設定します。
(
c
)
寸法は設計基準寸法を示します。余裕をみてください。
(
d
)
基板バックアップピンの位置は、
“10 mm”
ピッチで移動可能です。
(
e
)
コンベア、基板ストッパ、バックアップベースの位置関係は下記の
図を参照してください。
20051
50250 300
9
1030.5
5
10
可動A
可動A'
固定B'
可動B
基板ストッパ
基板ストッパ
バックアップベース
510
9
(デュアル搬送モード、左から右流れ時)
単位
: mm