1OM-1609-004_w.pdf - 第188页
1OM-1609 4-18 4 章 4. 基板認識マークの説明 4. 基板認識マークの説明 (1) 形状 / 寸法 ᒻ ⁁ D1 [mm] D2 [mm] ⠨ 0.3 㨪 3.0 0 㨪 2.8 ( ߚ ߛ ߒ 㨮 D 1 0. 2 ҈ D2 ) x ࡑࠢၮḰ : ਛᔃ x D2 : ᛮ߈ⓣኸᴺ ᱜ ᣇ ᒻ 0.3 㨪 3.0 0 㨪 2.8 ( ߚ ߛ ߒ 㨮 D 1 0. 2 ҈ D2 ) x …
1OM-1609
4-17
4 章 3. 部品装着条件
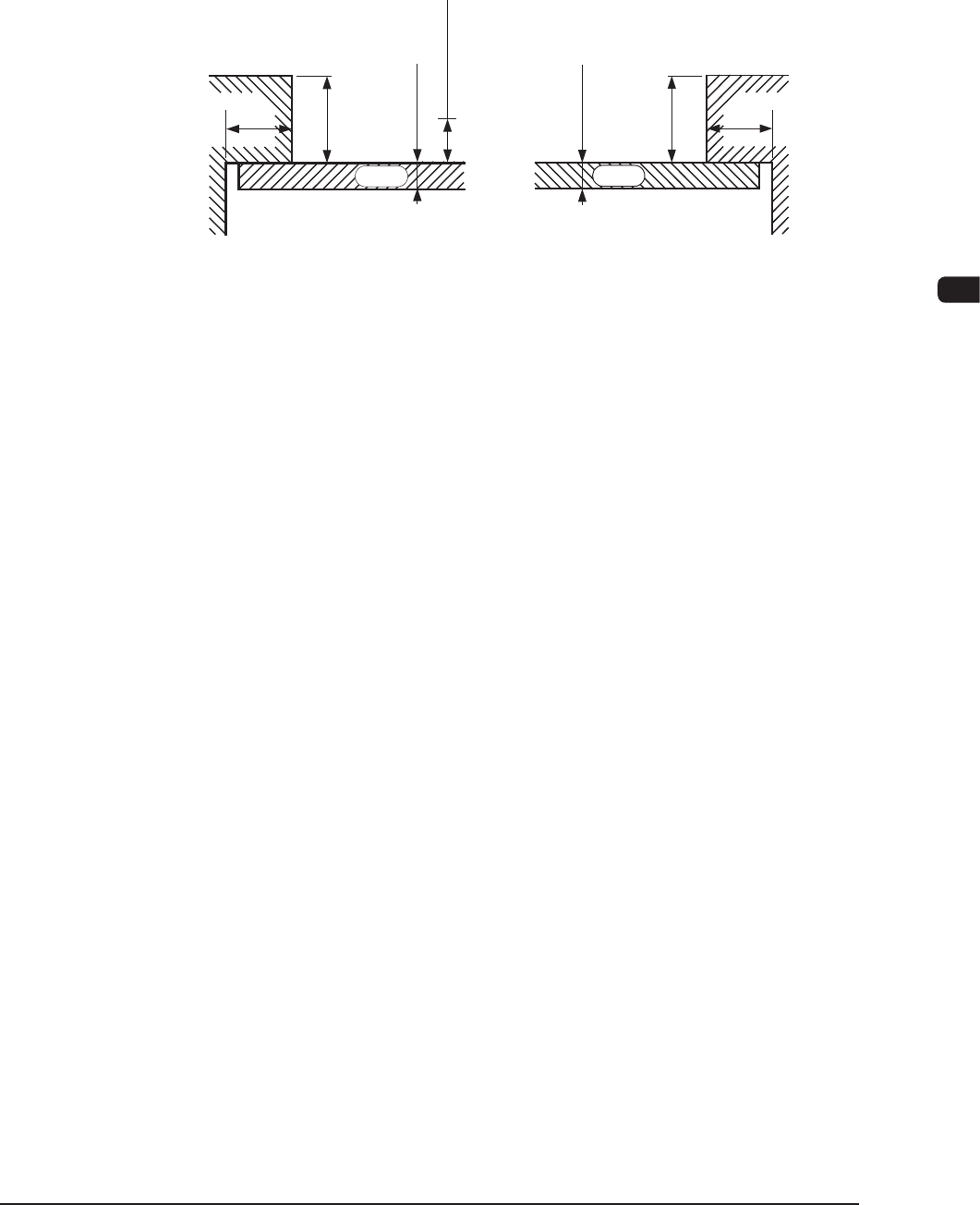
(3) 障害物との最小接近限界距離
•
障害物
( 各部断面図参照 )と吸着ノズルまたは部品との最小接近
限界距離は、“0.5mm”以上とします。なお、“基板上面”が基
準となります。
3.0
基板
3.0
基板
2.0
2.0
0.3~0.5
0.5mm以上
0.3~0.5
最小接近限界距離
(装置手前側) (装置奥側)
単位 : mm
シュート部断面図 F1E2
1007-003
1OM-1609
4-18
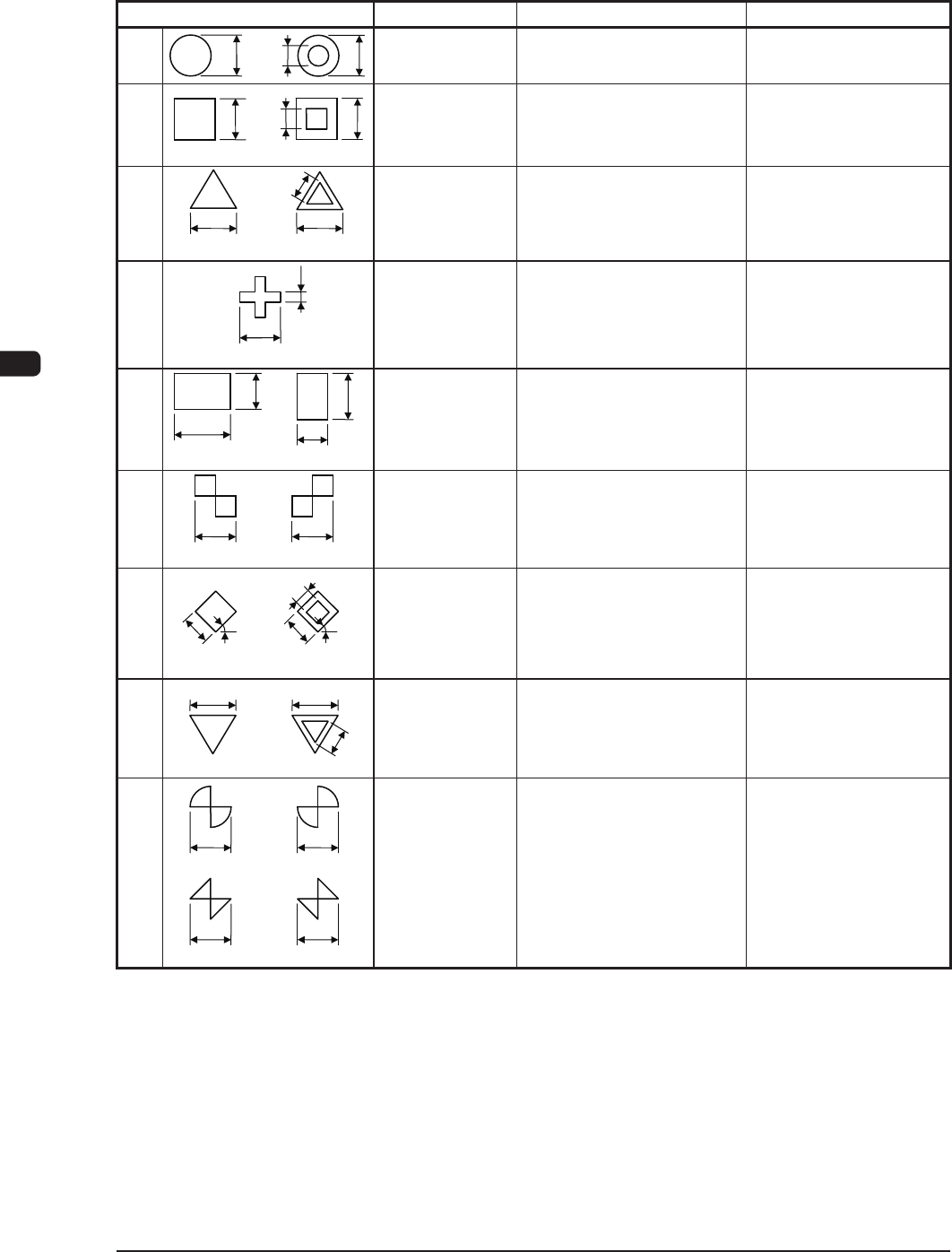
4 章 4. 基板認識マークの説明
4. 基板認識マークの説明
(1) 形状 / 寸法
ᒻ ⁁
D1 [mm] D2
[mm]
⠨
0.3㨪3.0 0㨪2.8
(ߚߛߒ㨮D10.2 ҈ D2)
x ࡑࠢၮḰ : ਛᔃ
x D2 : ᛮ߈ⓣኸᴺ
ᱜ
ᣇ
ᒻ
0.3㨪3.0 0㨪2.8
(ߚߛߒ㨮D10.2 ҈ D2)
x ࡑࠢၮḰ : ㊀ᔃ
x D2 : ᛮ߈ⓣኸᴺ
ะ
ᱜ
ਃ
ⷺ
ᒻ
0.5㨪3.0 0㨪2.8
(ߚߛߒ㨮D10.2 ҈ D2)
x ࡑࠢၮḰ : ㊀ᔃ
x D2 : ᛮ߈ⓣኸᴺ
ච
ሼ
ᒻ
0.5㨪3.0 0.2㨪1.5
(ߚߛߒ㨮D12 ҈ D2)
x ࡑࠢၮḰ : ㊀ᔃ
㐳
ᣇ
ᒻ
0.5㨪3.0 0.5㨪3.0 x ࡑࠢၮḰ : ㊀ᔃ
ᱜ
ᣇ
ᒻ
Ꮢ
᧻
ᒻ
0.5㨪3.0
x ࡑࠢၮḰ :
ҏ 2ߩᱜᣇᒻߩធὐ
࿁
ォ
ᱜ
ᣇ
ᒻ
⪉
ᒻ
0.5㨪3.0 0㨪2.8
(ߚߛߒ㨮D10.2 ҈ D2)
x ࡑࠢၮḰ : ㊀ᔃ
x D2 : ᛮ߈ⓣኸᴺ
ਅ
ะ
ᱜ
ਃ
ⷺ
ᒻ
0.5㨪3.0 0㨪2.8
(ߚߛߒ㨮D10.2 ҈ D2)
x ࡑࠢၮḰ : ㊀ᔃ
x D2 : ᛮ߈ⓣኸᴺ
Ⲕ
ᒻ
0.5㨪3.0
x ࡑࠢၮḰ :
2ߩᚸᒻ߹ߚߪਃ
ⷺᒻߩធὐ
D2
D1
D1
D1
D2
(
ⵝ⟎ᚻ೨
)
D1
D2
D1
(
ⵝ⟎ᚻ೨
)
D1
D2
D1
(
ⵝ⟎ᚻ೨
)
D1
D2
(
ⵝ⟎ᚻ೨
)
D2
D1
D1
(
ⵝ⟎ᚻ೨
)
D1
D1
D2
D1
(
ⵝ⟎ᚻ೨
)
45q
D1
D1
D2
45q
(
ⵝ⟎ᚻ೨
)
߹ߚߪ
D1
(
ⵝ⟎ᚻ೨
)
D1
D1
߹ߚߪ
D1
T1E3-1
1007-003
1OM-1609
4-19
4 章 4. 基板認識マークの説明
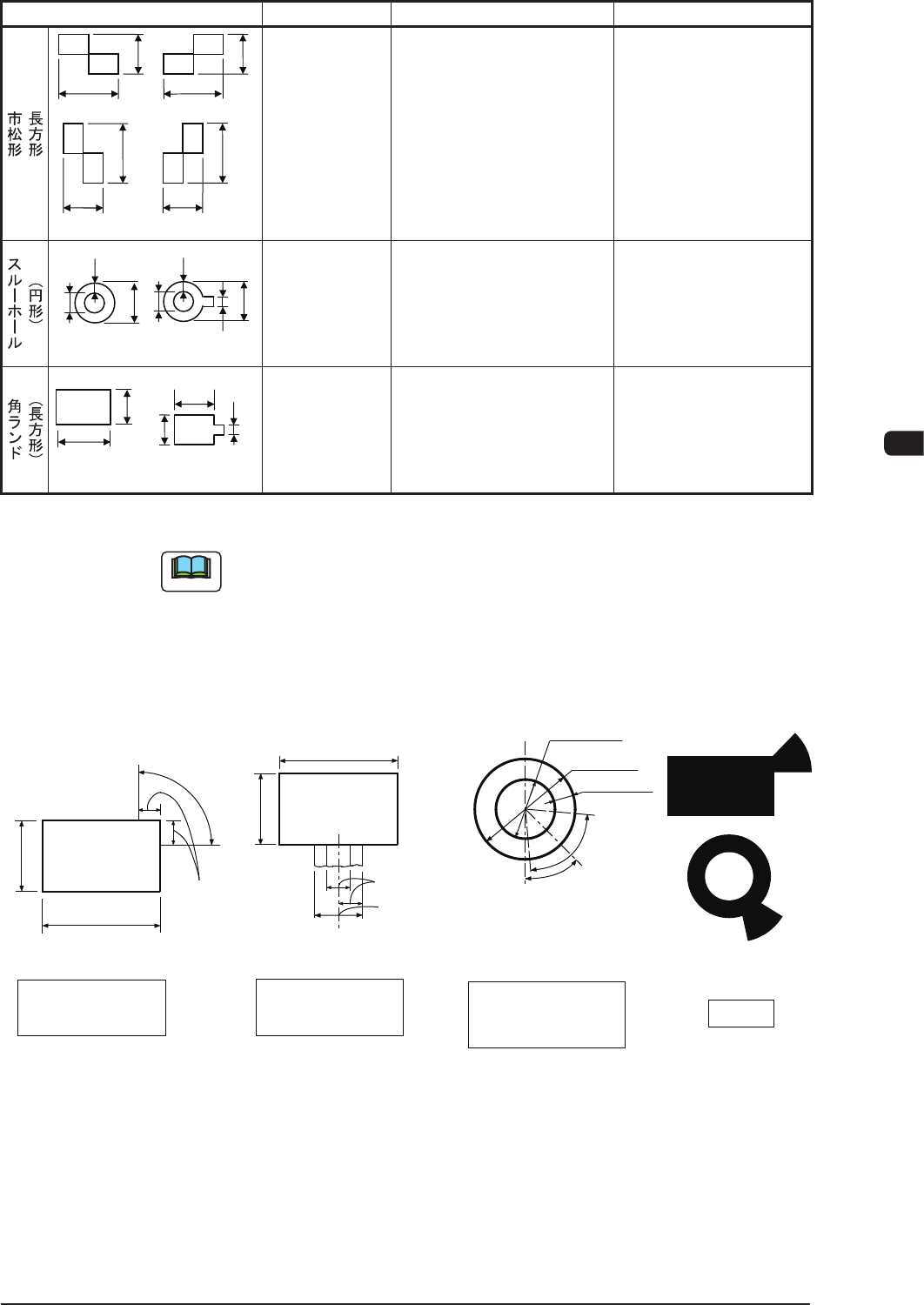
形 状
D1 [mm] D2 [mm]
備 考
( )
• マーク基準 :
2個の長方形の接点
• マーク基準 : 中心
• D2 : 抜き穴寸法
• W : Min. 0.25 mm
• マーク基準 : 重心
(装置手前側)
D2
D1
注
D1
D2
(装置手前側)
D2
W
D1
注
D2
D1
W
D1
D2
または
D1
D2
(
装置手前側
)
D1
D2
または
D1
D2
0.5~3.0 0.5~3.0
0.5~3.0 0 ~2.8
0.5~3.0 0.5~3.0
T1E3-2
ノート
(a)基準パターンに対して、マークのサイズ誤差が
±
10%
以内であるこ
と。
(b)スルーホールおよび角ランドから出ている配線方向は、45
°
きざみ
で 1 本のみです。
(2) 角ランドおよびスルーホールから出ている配線仕様
配線との接続範囲
角ランド45°
単位配線位置範囲
角ランド90°
単位配線位置範囲
(装置手前側)
(装置手前側)
短辺の1/3
0.5~2.0
0.5~3.0
短辺の1/3
配線との
接続範囲
(装置手前側)
(装置手前側)
(配線との
接続範囲)
配線例
スルーホール
配線位置範囲
(右下45°の場合)
0.5~1.5
1.0~3.0
Min.0.25
45°
80°
0.5~2.0
0.5~3.0
単位 :mm
F1E3
1103-004