0197786-01_BA_HeadVerification_708_DE.pdf - 第56页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 56 4.9.3 Erklärung des Messergebnisses anhand der Ergebnis-PDF Diese Ergebnisse k ann man sehen, wenn man im Summar y-Menü nac h unten scrollt, oder eine …

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
55
Der Wert für Down X [µm] für Segment 1 wird als Bezugswert für alle weiteren Segmente
verwendet und wird deshalb immer mit 0 gesetzt.
Weil der Segment Offset Unten für Segment 1 der Bezugswert für alle weiteren
Segmentoffsets verwendet wird, setzt man den tatsächlichen Segmentoffsetwert dx Down
[µm] als Wert 0 für Down X [µm] = 0!
Für die Beziehung aller weiteren Segmente wird mit der Formel
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
errechnet.
5. Errechneter Segmentoffset Unten Wert Down Y [µm] aus der Winkelmessung 0°. Dieser Wert
ergibt sich aus dem tatsächlichen Segmentoffset Unten Wert dy Down [µm] für dieses
Segment. Dieser Offset wird im Wert dy Down [µm] (10) abgebildet.
Die ermittelten Segmentoffsetwerte Down Y [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -330..330µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
Der Wert für Down Y [µm] für Segment 1 wird als Bezugswert für alle weiteren Segmente
verwendet und wird deshalb immer mit 0 gesetzt.
Weil der Segment Offset Unten für Segment 1 der Bezugswert für alle weiteren
Segmentoffsets verwendet wird, setzt man den tatsächlichen Segmentoffsetwert dy Down
[µm] als Wert 0 für Down Y [µm] = 0!
Für die Beziehung aller weiteren Segmente wird mit der Formel
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
errechnet.
6. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
7. Tatsächlicher Segmentoffset dx Up [µm] des jeweiligen Segments zur
Bauelementekameramitte beim Vermessen des Kalibrierteiles.
8. Tatsächlicher Segmentoffset dy Up [µm] des jeweiligen Segments zur
Bauelementekameramitte beim Vermessen des Kalibrierteiles.
9. Tatsächlicher Segmentoffset dx Down [µm] des jeweiligen Segments zur
Leiterplattenkameramitte beim Vermessen des Kalibrierteiles.
10. Tatsächlicher Segmentoffset dy Down [µm] des jeweiligen Segments zur
Leiterplattenkameramitte beim Vermessen des Kalibrierteiles.
11. Diagramm zur Darstellung der Segmentoffsetwerte Oben mit folgenden Werten:
Abszissenachse (x-Achse) Segment offset up X [µm]
Ordinatenachse (y-Achse) Segment offset up Y [µm]
Rote Grenzlinien Toleranzen Min und Max (in unserem Fall -290..290µm)
Mit dem Button kann das Diagramm vergrößert werden.
12. Diagramm zur Darstellung der Segmentoffsetwerte Unten mit folgenden Werten:
Abszissenachse (x-Achse) Segment offset down X [µm]
Ordinatenachse (y-Achse) Segment offset down Y [µm]
Rote Grenzlinien Toleranzen Min und Max (in unserem Fall -330..330µm)
Mit dem Button kann das Diagramm vergrößert werden.
13. In diesem Screen werden folgende Werte dargestellt:
a. Streuung Up X Dieser Wert ermittelt sich aus der Differenz des kleinsten
Wert für Up X [µm] (2) und dem größten Wert für Up X [µm] (2). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
b. Streuung Up Y Dieser Wert ermittelt sich aus der Differenz des kleinsten
Wert für Up Y [µm] (3) und dem größten Wert für Up Y [µm] (3). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
c. Streuung Down X Dieser Wert ermittelt sich aus der Differenz des kleinsten Wert
für Down X [µm] (4) und dem größten Wert für Down X [µm] (4). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
d. Streuung Down Y Dieser Wert ermittelt sich aus der Differenz des kleinsten Wert
für Down Y [µm] (5) und dem größten Wert für Down Y [µm] (5). Die Differenz muss
innerhalb einer plausiblen Toleranz (in diesem Falle 0..220µm) liegen.
e. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
56
4.9.3 Erklärung des Messergebnisses anhand der Ergebnis-PDF
Diese Ergebnisse kann man sehen, wenn man im Summary-Menü nach unten scrollt, oder eine
Ergebnis-PDF erzeugt!
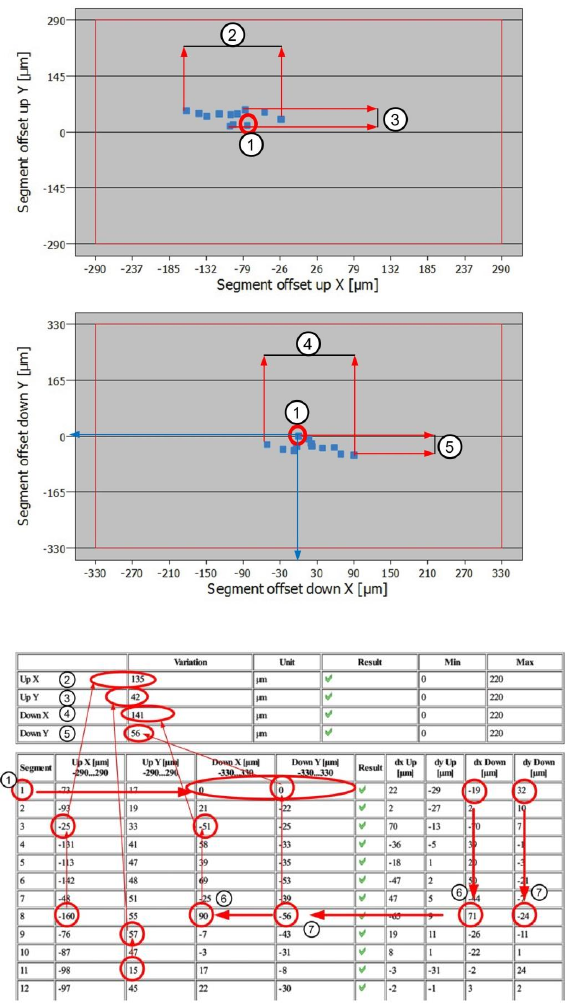
Abbildung 37: Ergebnis-PDF Segment offset up and down_1
Abbildung 38: Ergebnis-PDF Segment offset up and down_2
Am Segment 1 kann man sehen, dass der Wert für den Segmentoffset unten Down X [µm] und Down
Y [µm] (1) mit jeweils 0µm ermittelt wurde. Dies ist der Referenzwert für das Referenzsegment 1, von
dem aus alle anderen Segmentoffset-Werte der anderen Segmente bezogen werden.
Im Diagramm kann man dies auch daran erkennen, dass der Segmentoffset-Wert von Down X [µm]
und Down Y [µm] des Segment 1 exakt auf der Position 0µm liegt (siehe blaue Pfeile)
Der Wert Variation Up X [µm] (2) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Up in X-Richtung.
Der Wert Variation Up X [µm] errechnet sich wie folgt:
Variation Up X [µm] = Up X max [µm] – Up X min [µm]
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
57
Variation Up X [µm] = -160µm – (-25µm) = |135µm|
Der Wert Variation Up Y [µm] (3) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Up in Y-Richtung.
Der Wert Variation Up Y [µm] errechnet sich wie folgt:
Variation Up Y [µm] = Up Y max [µm] – Up Y min [µm]
Variation Up Y[µm] = 57µm – 15µm = |42µm|
Der Wert Variation Down X [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in X-Richtung.
Der Wert Variation Down X [µm] errechnet sich wie folgt:
Variation Down X [µm] = Down X max [µm] – Down X min [µm]
Variation Down X [µm] = 90µm – (-51µm) = |141µm|
Der Wert Variation Down Y [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in Y-Richtung.
Der Wert Variation Down Y [µm] errechnet sich wie folgt:
Variation Down Y [µm] = Down Y max [µm] – Down Y min [µm]
Variation Down Y [µm] = 0µm – (-56µm) = |56µm|
Der Wert Down X [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dx Down [µm] = -19µm
ermittelt. Der Wert -19µm wird als Bezugswert 0µm gesetzt und ergibt somit Down X [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down X [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
In unserem Beispiel (6) für Segment 8 errechnet sich der Wert Down X[µm] Seg 8 wie folgt:
Down X[µm] Seg 8 = 71µm – (-19µm) = 90µm
Der Wert Down Y [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dy Down [µm] = 32µm
ermittelt. Der Wert 32µm wird als Bezugswert 0µm gesetzt und ergibt somit Down Y [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down Y [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
In unserem Beispiel (7) für Segment 8 errechnet sich der Wert Down Y [µm] Seg 8 wie folgt:
Down Y [µm] Seg 8 = -24µm – 32µm = -56µm